リハビリテーションおよびプロテーゼ用ドライブシステム
動きを完全制御
階段を登る、靴ひもを結ぶ、フォークを握るなど、メカトロニクスシステムを用いて人間の動きを模倣することは、エンジニアにとって最大の課題のひとつです。高度な革新技術を追求している企業は、正確な動きを実現するためにmaxonのドライブシステムを採用しています。


maxonの推奨製品
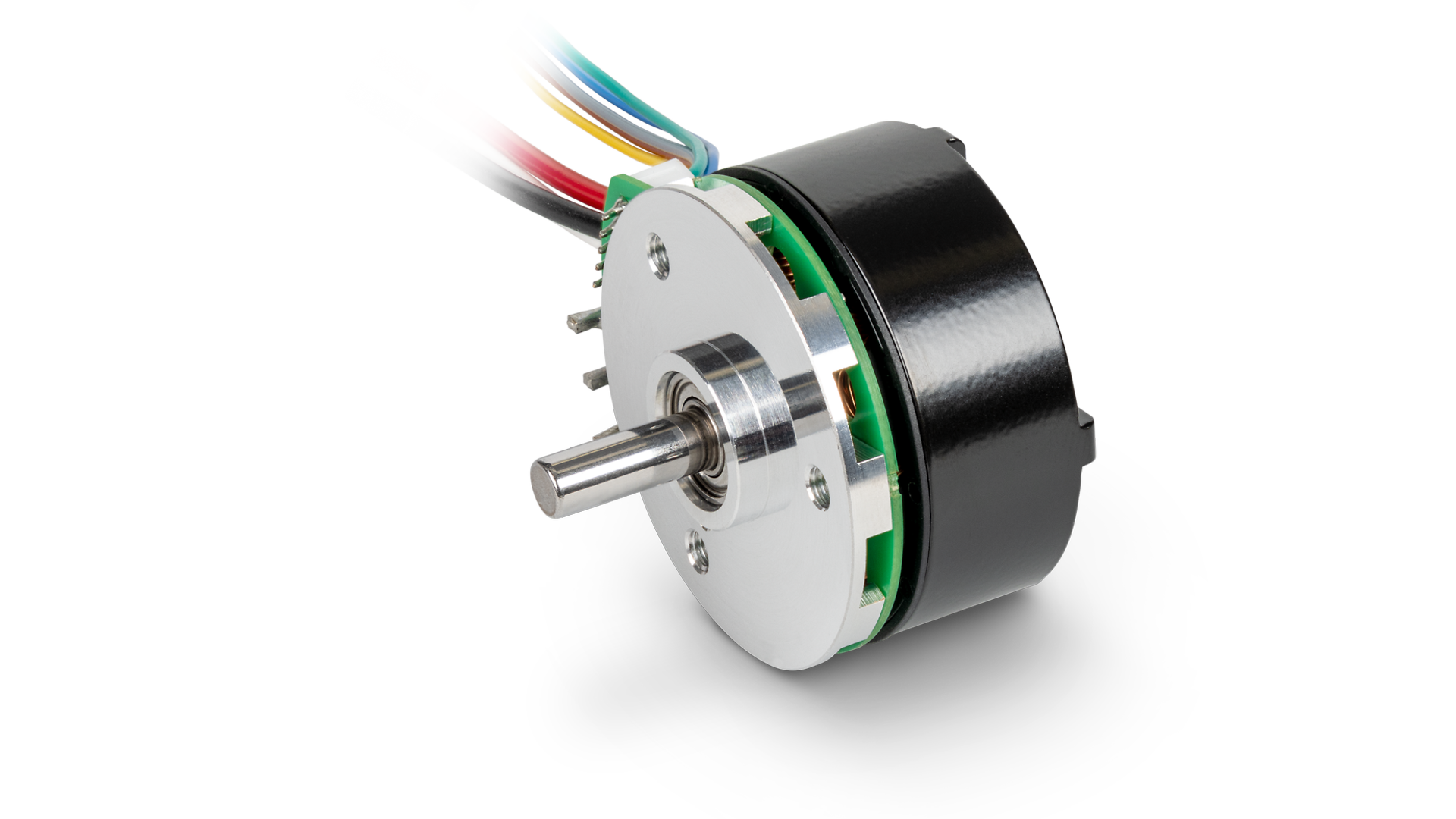
モータ
多くの動作には多大な力だけではなく、動きによってモータの回転方向を常に変化させる必要があるため、高ダイナミクスも必要となります。さらに、可能な限り省スペースのコンパクトな設計を考慮する必要があります。



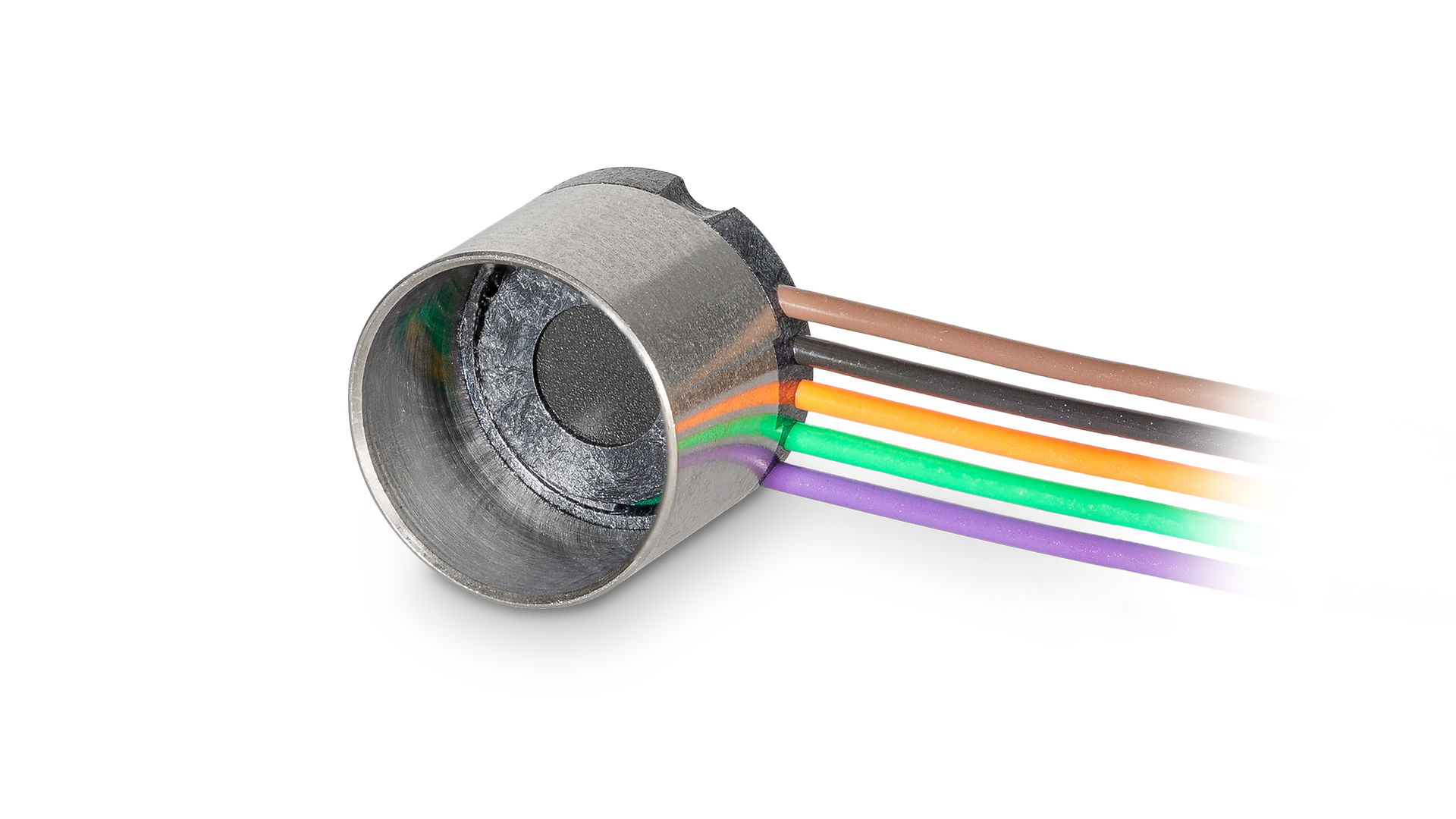
ギアヘッド
当社のギアヘッドは、軽量・低騒音で最高のパフォーマンスを発揮します。そのため、義肢装具の性能に悪影響を与えず、使用者の装着快適性も向上します。

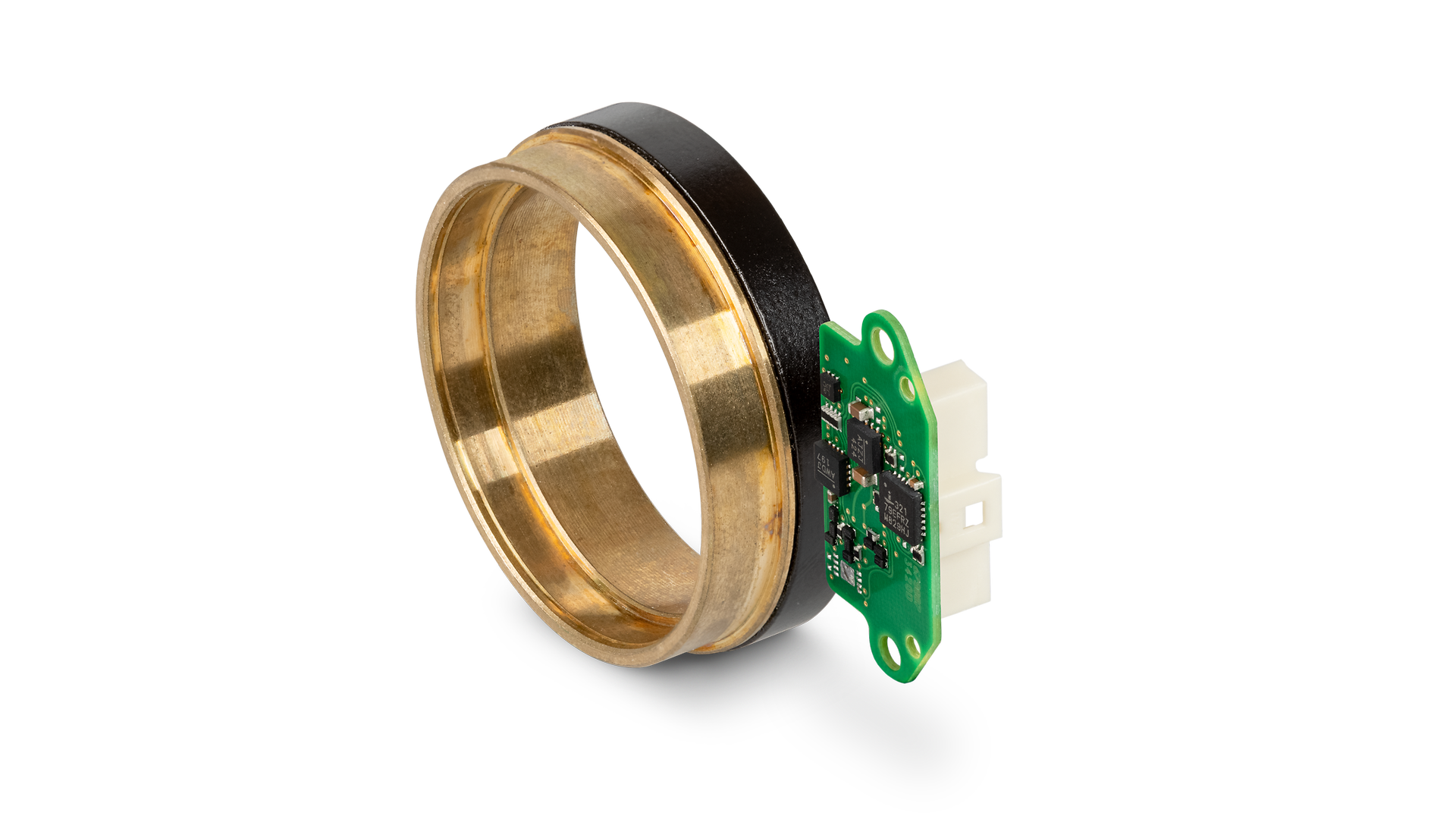
エンコーダ
医療技術分野向けドライブソリューション
今すぐパンフレットをダウンロードしましょう
医療技術分野における用途の概要に加え、ハイテク人工装具や外骨格に関する弊社の主要製品群についてさらに詳しくご紹介します。





よくある質問
バックラッシの大きさはどの程度ですか?
maxonギアヘッドのバックラッシは、ギアヘッドによりそれぞれ異なっています。標準ギアヘッドの場合、この値はカタログの各製品ページの「平均バックラッシ」に記載されています。
バックラッシのないギアヘッドはありますか?
ゼロバックラッシギヤヘッドはバックラッシがほとんどありません。バックラッシの極めて少ないmaxonギヤヘッド(Cycloflex)が現在開発中です。いわゆるバックラッシフリーギアもハーモニックドライブに組み込むことができます。
ギアヘッドの回転方向は?
ギアヘッドの回転方向は、この用途では重要ではあありません (時計回りおよび反時計回り)
ギアヘッドは逆回転が可能ですか?
プラネタリギアヘッドは効率を重視して設計されているため、逆回転するようには設計されていません。1段または2段ギアヘッドは、場合によっては逆回転させることが可能です。ただし、3段ギアヘッドの場合、逆回転はできません。いわゆる「バックラッシフリー」ギアでも、基本的には逆回転は行えません。
実現可能なエンコーダ分解能の帯域幅はどの程度ですか?
エンコーダ分解能は1 cpt~65536 cptです(RIOエンコーダ)。さまざまなアブソリュートエンコーダ(シングルターン、マルチターン)も最大19ビットの分解能でご入手いただけます。
1つのモータコントローラでデュアルループソリューション/ 2台のエンコーダを使用することは可能ですか?
はい。EPOS 4は、デュアルループモード (2つのエンコーダ) をサポートしています。
お問い合わせ
ほかにご不明点やご質問は ございますか?
maxonの医療技術専門チームが皆様のご質問にお応えいたします。
