Expert Blog
モータからドライブシステムに至るまで

maxon motor は、コンポーネントサプライヤーからシステムソリューションプロバイダーへと進化し続けています。私たちは、モータ、ギアヘッド、エンコーダ、速度および位置コントローラといったコンポーネントを提供しています。私たちにとって、システムとは、メカトロニクスユニットとサブシステムを備えた完全なドライブソリューションであり、さらに大きな文脈に統合されているものです。焦点は、使用可能な個別コンポーネントから、主要な機能性の実装へと移行しています。
最初に着手するのは、カスタマイズされたコンポーネント。具体的にはフラットモータです。熱放散を改善するためにロータには穴が開けられています。なお、カスタマイズされたモータ駆動電子機器への接続には専用のケーブルとコネクターが必要です。最初は、モータやその機械的・電気的インターフェースの目的は明確にはわかりません。お客様が提供する詳細な調査結果により、モータがギア付きロボットジョイントを駆動していることが明らかになりました。非常に限られたスペースで、既存のソリューションの取付けは複雑なものになります。さらに、要求される諸々の追加機能のことを考えると、統合式のシステムソリューションが必然的に必要となります。
機械的要件
· 低速・高トルクにはギヤードモータが必要
· ギア出力時の可動範囲:約 120°
· 停電時のジョイントのブロック (保持ブレーキ)
· ブロック解除機能。システムは自己ブロッキングしない可能性があります。
· ジョイントにケーブルを通します
電気的・電子的要件
· ブラシレスモータ用ドライバ (転流、電流、速度制御含む)
· 上位マスターコントロールとの通信
· モータとギア出力用の角度センサ、位置情報をマスターに送信
これらはすべて、事前に定義された寸法と重量の制限内で行われます。さらに、エミッション (温度、振動、および可聴ノイズ) は低く抑えなくてはいけません。このシステムはバッテリーで駆動するため、エネルギー効率に優れている必要があります。もちろん、コストも考慮しなければいけません。
この要件リストには、統合ソリューションを求める際に考慮すべき要件が記載されています。これらの要件を明確にするには、お客様とシステムインテグレータがじっくりとオープンに話し合う必要があります。
システム限界
最初に答えるべき質問は、「何をシステムの一部に統合しますか?」「達成しなければいけない機能を考慮すると、合理的なシステム境界はどこに設定できますか?」「システム環境、機械的、電気的インターフェースはどのように構成しますか?」「情報はどのように交換され、エンドユーザはどのようにシステム全体と通信しますか?」
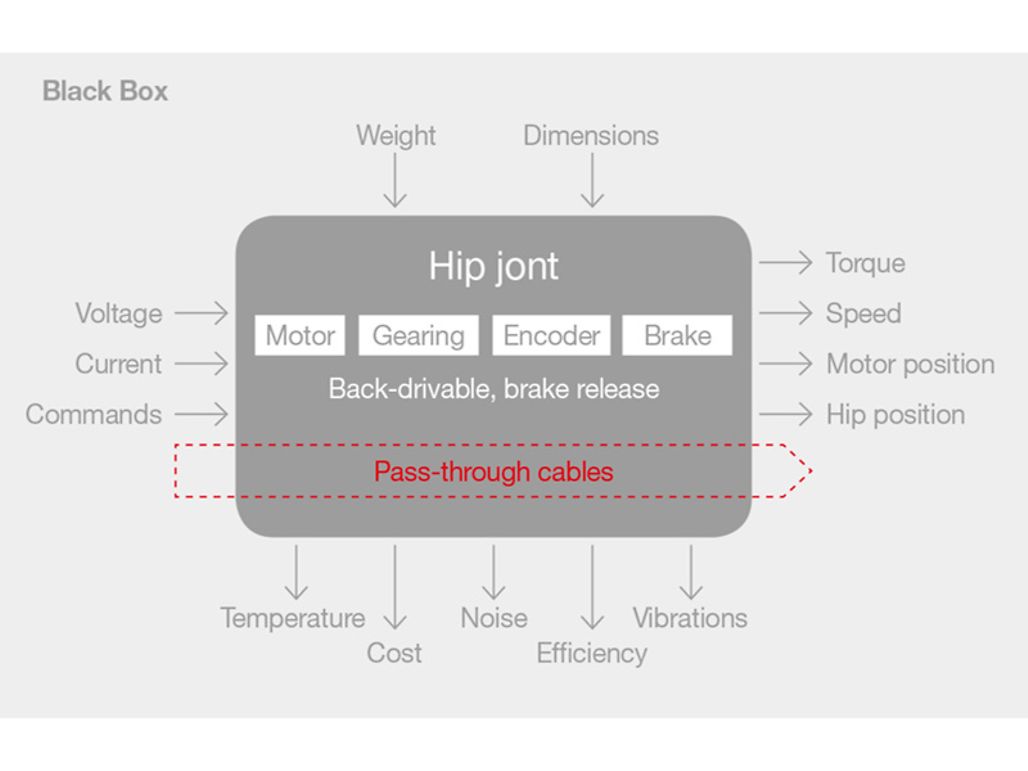
複雑なシステムの開発には、さまざまな知識のバックグラウンドや視点を有する人々が関わります。すべての人が理解を共有し、同じ目標に向かって取り組むことができるようするには、どのようにコミュニケーションを最適化すればよいでしょう?これには、上図のブラックボックスの考え方役に立つかもしれません。詳細にこだわらない、トップダウンのアプローチも合理的な方法です。また、システム全体を扱う際に見落とされることが多いもう 1 つの側面は、エンドユーザのニーズをどのように考慮するかという問題です。
システム仕様の定義
システム開発のきっかけには、目標を定めるための重要なヒントが含まれていることがあります。今から行おうとしているのは、ゼロからの開発ですか?既存のソリューションの改善ですか?なぜ既存のソリューションは不十分なのですか?仕様を定義するときは、常に状況分析が基礎となります。具体的に、これはどのようなものですか?システムコンテキストはどのようになっていますか?重要なのは、目的を中立的に定式化することであり、解決策を示唆することではありません。上記の例では、停電時に必要なブロックは、保持ブレーキだけでなく、セルフブロックギアでも実装できます。
ソリューション
目標のカタログは、さまざまなソリューションを開発するための基礎として機能します。など、これらソリューションはそれらの適合性によって判断されなければいけません。可能性のあるソリューションは、既存の製品を使用することも珍しくありません。この関連で、近年の maxon 製品プラットフォームの設計についてご説明しましょう。このプラットフォームでは、システム開発中に実績のある既存のコンポーネントを活用することができるため、よりスピーディにカスタマイズを行えます。このため、技術的労力、時間、そして経済的リスクが最小限に抑えられます。
maxon のシステムは、ほとんどの場合、駆動機構、アクチュエータ、センサ、コントローラといった、機械部品と電気部品を組み合わせたメカトロニクスの分野で活用されています。さらにソフトウェアは、コントローラファームウェアやプラント全体を制御するコンピュータプログラムなどの分野で、ますます重要になっています。
異なるソリューションを関連付けようとする場合は、類似の条件があることが必要です。たとえばこのお客様の場合、統合システムの費用は、個々のコンポーネントの価格だけでなく、インターフェースのコストや設置費用とのバランスを考慮する必要があります。
経済的境界条件
状況分析における必須の要素は、新しい設計を行う価値があるか、投資資金の回収はいつ頃になるかということです。どれくらいの期間で、いくつ販売できるのか?こうした現実的な市場予測が必要になります。1 回限りのエンジニアリングおよびツーリングのコストを製品価格に含めるか、または別途支払いにするかどうかも決めなくてはいけません。基本的に、正味現在価値 (NPV) の計算は、プロジェクト開始時に経済的決定を行うのに役立ちます。しかしながら、ここには戦略的適合性に関する考慮事項とリスク分析も基準として追加されます。
すなわち、ここで紹介した要素に加え、テキストブック「高精度マイクロドライブの選択」で説明されているステップと手順に従う必要があるのです。
ところで...
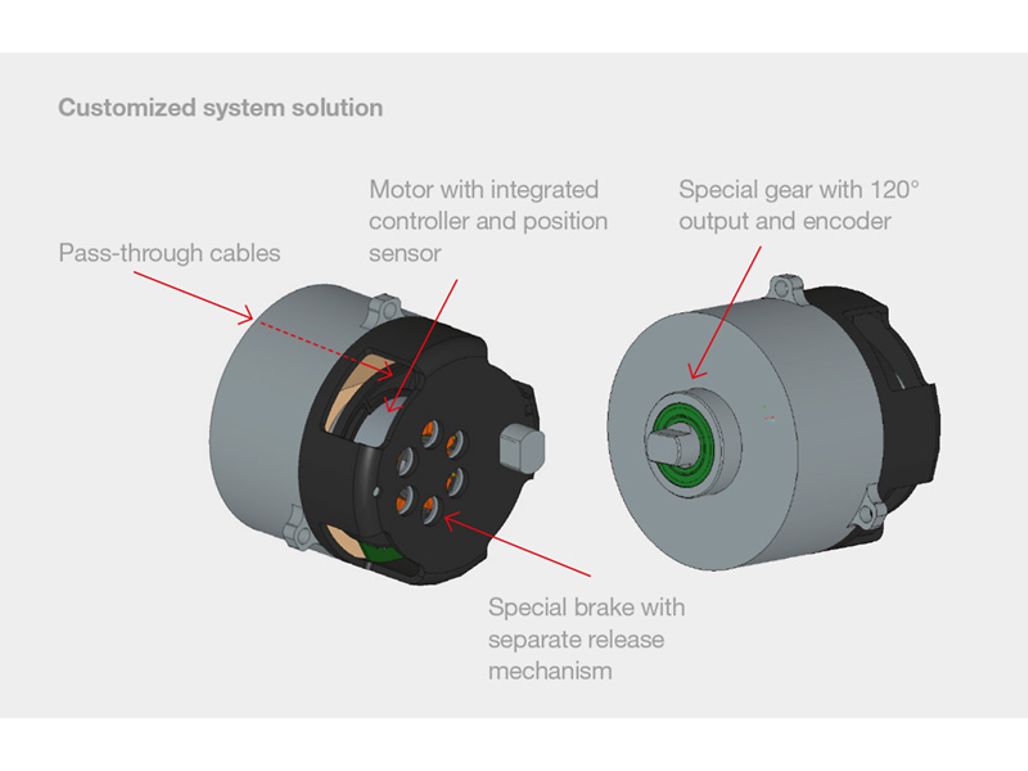
ロボットの股関節用に提案されたソリューションは、最初に選択されたモータで構成されていますが、maxon ESCON コントローラ プラットフォームに基づいて統合された電子機器が組み込まれ、特別なギアと組み合わされています。モータとギアの位置は、統合型エンコーダで供給されます。特別に設計された保持ブレーキは、ロータに直接作用し、コンパクトなハウジングに収められています。お客様にとっては、この統合式システムの取り付けは、個別のコンポーネントで構成された既存のソリューションと比べると、はるかに簡単かつ迅速に行えます。