Young Engineers Program
ワンランク上にステップアップ

多くのロボットにとって、階段は未だに乗り越えることが困難な障害物です。ところが、スイス連邦工科大学チューリヒ校 (ETH) の若い学生チームは、これらのステップを簡単に乗り越えることができるように設計した車両を構築しています。
機械工学を専攻する8名の学生と電気工学を専攻する1名の学生で構成されたチームです。彼らは、この洗練されたデバイスを「Ascento」と命名しました。このロボットは非常に特殊なロボットです: ロボットは、2つの車輪で移動し、バランスをとります。エンジニアリングの観点から見ると、このロボットの構成は、4つの車輪でデバイスを構築するよりもはるかに困難です。しかしながら、二輪走行ロボットなら、より優れた機動性とさまざまな地形への適応性を確保することができます。
それだけではありません: この新進気鋭の9名のエンジニアたちの主な目的は、ロボットをジャンプさせることです。彼らは、このロボットがカンガルーのように高くジャンプし、2つの車輪で安全に着陸できるようにすることを目指しています。「これにより、ロボットは階段やその他の障害物を乗り越えることができるようになります」と学生のフロリアン・ヴェーバー (Florian Weber) 氏は説明します。Ascentoチームは、フォーカスプロジェクトの一環として誕生しました。こうしたプロジェクトでは、さまざまな分野の学生たちが、最初の着想から最終的には機能するプロトタイプの作成まで、具体的なプロジェクトに彼らの知識を活かす機会を得ることができます。
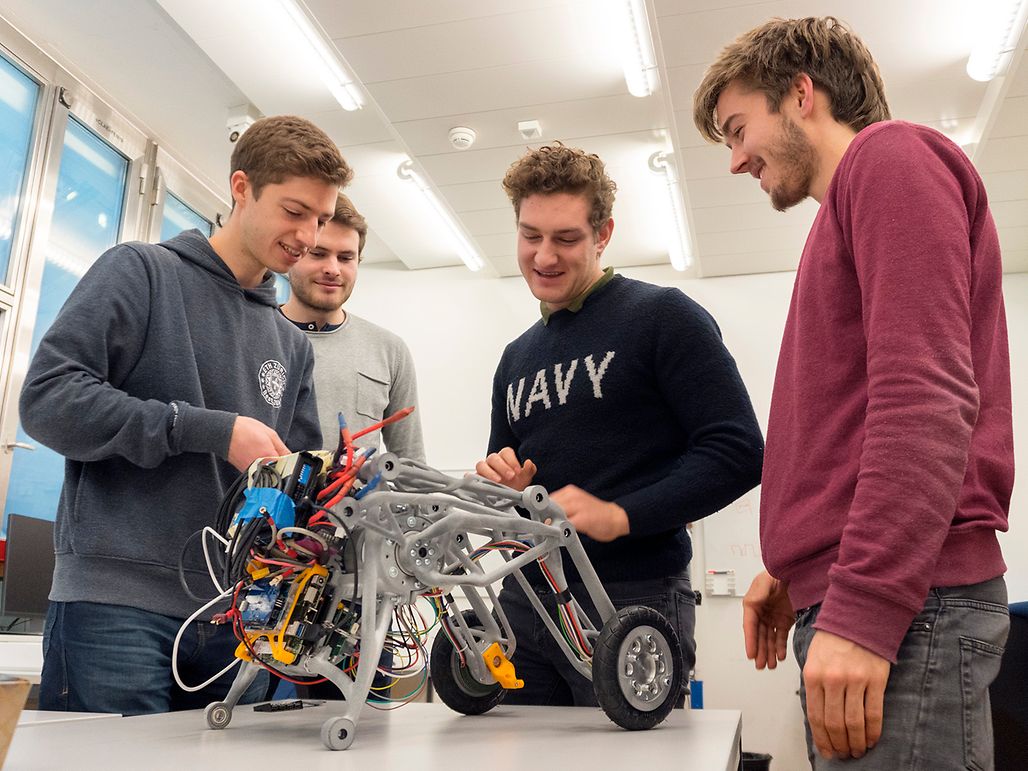
左から: チーロ・ザルツマン氏、マーカス・フィアナイゼル氏、ライオネル・グリッヒ氏、フロリアン・ヴェーバー氏
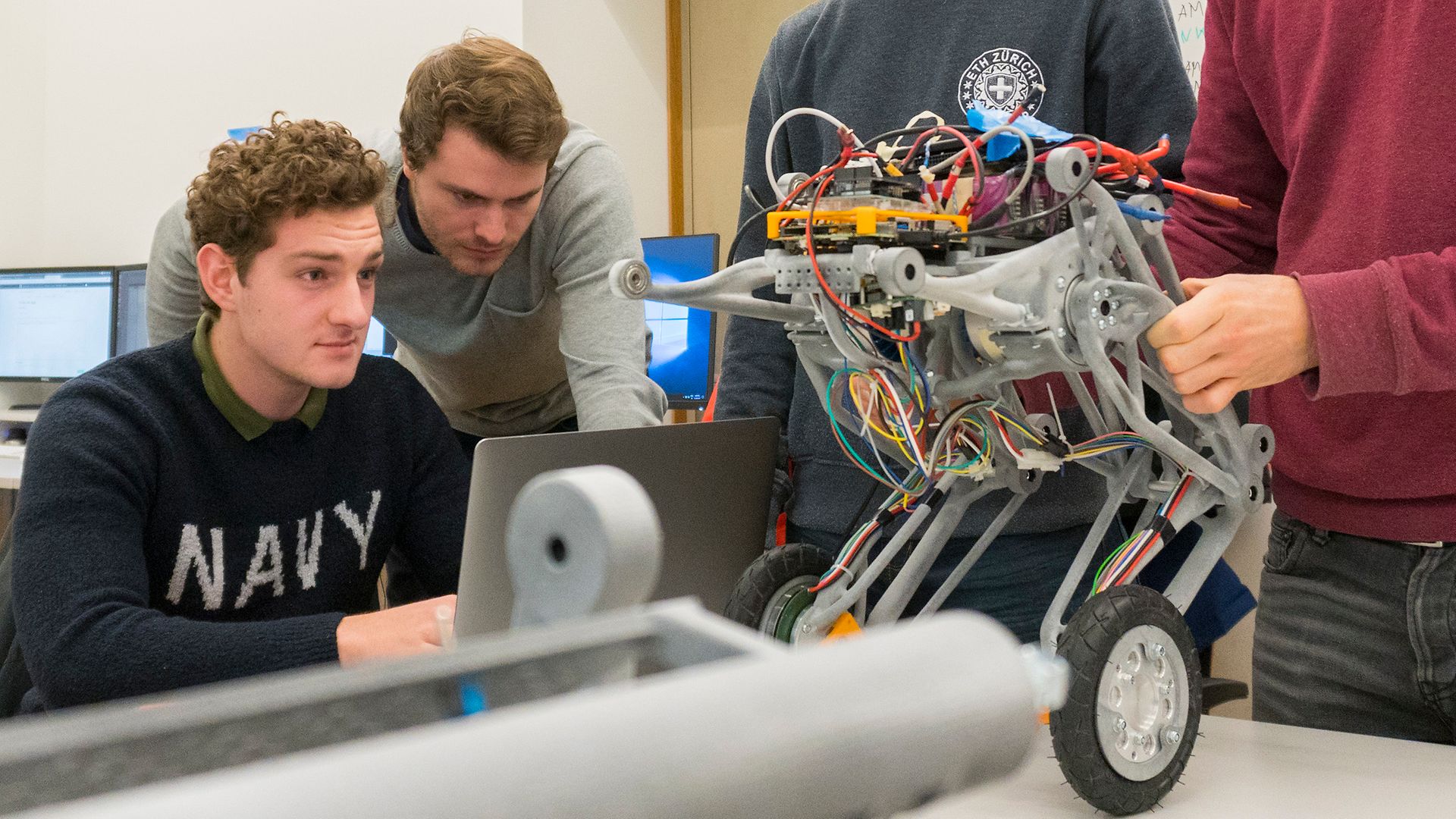
Ascentoが特別な点は、これが倒立振子として設計されていることです。重心は軸の上にあります。そのため、Ascentoは、動力が供給され、車輪で積極的にバランスを取っている限り、立ったまま移動することができます。これは、立っている人間がバランスを維持するために継続的にエネルギーを消費しなければならないのと同じです。またAscentoは、同じ軸上にある2つの車輪によって駆動され、バランスを維持するために制御された駆動力を必要とします。このため、作動原理はSegwayと類似しています。
左から: フロリアン・ヴェーバー氏、ドミニク・マンハート氏
Ascentoの潜在的な用途には、建物の検査などがあります。たとえば、火災や崩壊の危険がある建物に車両を進入させることができます。ビルトインカメラにより、建物の外にいる救助隊員に貴重な情報が送信されます。これらの用途に使用されるさまざまなロボットは、既に存在しています。ただしこのロボットとは異なります: 「とりわけ、階段を上るときは、多くのロボットが能力の限界に達します」と、9名のフォーカスグループのメンバーの一人であるマーカス・フィアナイゼル氏は述べています。同チームの目標は、Ascentoを人間の歩行速度で階段を上れるようにすることです。軽量で二輪設計のAscentoは、他のロボットよりも機敏に動きます。「その一方で、大型ロボットは環境と相互作用して作動することができます。これはAscentoにはできないことです」。機械工学部の学生であるライオネル・グリッヒ氏はこう付け加えます。センサーを搭載したAscentoは、建物を偵察し、室内の3Dスキャンを短時間で提供することができます。もちろん、プロトタイプだけで建物全体を偵察することはまだできません。ただし、遠隔操作で階段に近づき、センサーを使用して、各ステップを上るのに必要なジャンプの高さと長さを測定および計算することはできるようになることでしょう。「遠隔操作で毎回ジャンプをトリガーするのは、複雑で時間がかかりすぎます」とフロリアン・ヴェーバー氏は言います。このため、Ascentoは半自律型ロボットのカテゴリーに分類されています。
このフォーカスプロジェクトとAscentoプロトタイプが、最終的に商用生産向けの検査ロボットになるかどうかはまだ不明です。ただし、これは同チームの最終目標ではありません。フォーカスプロジェクトの主要な目的は、チューリヒ工科大学の学生が理論を詰め込むだけでなく、実際のプロジェクトに取り組むことができるようにすることです。
学生たちは、同社のヤングエンジニアプログラム (YEP) の一環として、駆動専門メーカーのmaxon motorから技術面および資金面での支援を受けています。Ascentoのドライブには、2つのmaxon EC 90 flatモータが搭載されています。技術的には、ロボットが平面に沿って移動する場合、これらのモータによって供給される 963 mNmのトルクは少し過剰です。ただしこのドライブは、狭い階段ステップに着地した後にAscentoのバランスをとるときにその真価を発揮します。これは、この際に高トルクと正確な制御が必要になるためです。チューリヒ工科大学の学生は、フレームレス仕様のモータを使用することを決定しました。ロータとステータは個別に納品され、出力軸は付属していません。ロータとステータは、システムへの統合時に初めて接続されることになります。特にロボット工学では、maxonのフレームレスモータが最初の選択肢になることがよくあります。これは、スペースを節約し、多関節構造にスマートに統合することができるためです。各モータは、EPOS4モジュールによって駆動されます。
画像著作権
Adrian Venetz / maxon motor