maxon Story
Smart ArM: 人体の限界に挑む


サイバスロン2020は、バイオニック支援技術を使用した障害のある競技者のためのユニークな国際競技会です。この大会に参加するために、パリのインテリジェント・システム・ロボティクス研究所 (ISIR) のフランスの研究者チームは「Smart ArM」を開発しました。このプロテーゼは、上腕切断者向けに設計された上腕義手です。このプロテーゼの設計は、数年間にわたる研究の結果であり、人工肘の作成という難題を伴う挑戦でした。この記事では、この技術的偉業と人類の無限の可能性を振り返ります。
新型コロナウイルスパンデミックの影響により、第2回目となる同イベントは、2020年11月13~14日に全世界の各チームの本拠地にて、新たな形式で開催されます。各拠点では競技のためのインフラが設営され、レースが撮影されます。競技は、新しいプラットフォームを通じて、ユニークなライブプログラムとしてチューリッヒから放送されます。
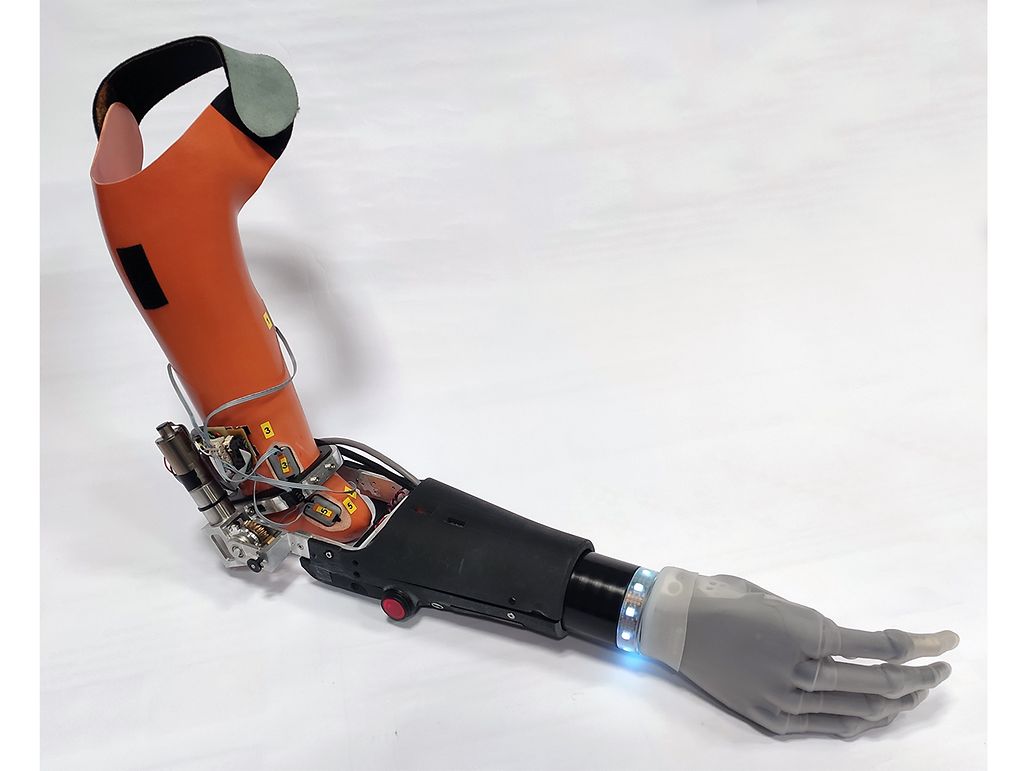
上腕切断者向けに設計された上腕義手
特定の障がいの装着ニーズを満たすための、熱意に満ちたプロジェクト
上肢の切断は、前腕や手の切断ほど一般的ではなく、長い間研究が行われてきませんでした。この障がいは、上腕骨切断または前腕全無形成症と呼ばれ、出生以来、上腕の骨が欠損した先天性疾患です。この障がいを理由としてプロテーゼの装着を希望するのは主に若い世代の人たちですが、適切なプロテーゼのソリューションは、現在までのところほとんどないか、またはまったく存在しません。この状況を認識したインテリジェントシステム・ロボティクス研究所 (ISIR) の研究者チームは、2014年に研究プロジェクトを発足しました。AGATHEチーム (Assistance au Geste et Applications therapeutiques、ジェスチャー支援と治療への応用) としてグループ化されたこれらの研究者が上肢義足の分野でもたらした成果は、将来を十分に期待させるものでした。「私たちは、2016年に開催された第1回サイバスロンに観客として参加した後、ビジョンとイノベーションを促進するためのチームを立ち上げたいと考えました」。ISIRの調査責任者およびSmart Armプロジェクトのマネージャーであり、身体の最適化に情熱的に取り組むナタナエル・ジャラッセ (Nathanaël Jarrassé) 氏はこう説明します。
人と機械の結びつき
次に、彼らはパイロットを見つける必要がありました。適任者を見つけるのは困難でしたが、サイバスロンのパートナーであり、ISIRのモータのサプライヤーであるmaxonの協力を得て、理想的な候補者が見つかりました。この候補者であるクリストフ・ユシェ (Christophe Huchet) 氏は、パリのレストランの元マネージャーで、現在は中小企業の経営者を指導しています。右前腕全無形成症で生まれた彼は、ハンドスポーツ水泳の複数の優勝記録を持ち、また健常者の部門でも驚くべき成果を達成した水泳の経歴を持っています。「このプロジェクトは、私自身の水泳の経歴から競技スポーツへの高揚感とそれにかける情熱を思い起こさせるものです。しかし今回は、人々のために技術と社会を進歩させるという大義に献身しています。上腕義手を付けている人に対する見方を変えようとするこのイベントに参加することも、私にとっては重要でした。また、「ユーザーとプロテーゼ」の組み合わせが並外れた能力を発揮できることを示し、障がいをある意味で「美しい」ものにする身体とテクノロジーのこの繋がりを促進することも有意義であると思いました」。クリストフ・ユシェ氏はそう説明します。

2018年、サイバスロンに参加するために、Smart Armチームが発足しました。同チームは、パイロット、マネージャー、ISIRとISM-Univ Aix-Marseilleという11名の技術チーム、および医療チームで構成されています。こうしたプロジェクトには、プロテーゼと身体を適切に接続するため、メカトロニクスから神経科学や生理学、コンピュータサイエンスに至るまで、さまざまな研究分野の専門知識が結集されています。
「私たちがサイバスロンに参加した動機はいくつかあります。そこには、競争の激しいなかでテストされるISIRの技術革新を促進したいというものも含まれています。また、ロボット支援技術の真の可能性と限界を伝えるとともに、これらの特定の障害について、一般の人々の注意を喚起したいと考えていました」とナタナエル・ジャラッセ氏は説明します。私たちは、成功は技術だけによるものだと思い込む傾向にありますが、Smart Armプロジェクトは、「人と機械」の結びつきにおいて、人間が果たす主要な役割を浮き彫りにしています。


複数の設計上の問題
パイロットを軌道に乗せようとするとき、Smart ArMチームはいくつかの困難に直面しました。最大の課題となったのは、クリストフ・ユシェ氏の体の構造と互換性のある、「外骨格」と呼ばれる人工肘関節の開発でした。「一般に、切断によって短くなった腕切断者の端部とはことなり、彼の腕は正常な腕の長さであるため、従来の骨格内肘関節の人工関節を取り付ける余地はほとんどありません」。ナタナエル・ジャラッセ氏はそう説明します。研究者たちは、人工肘関節の軸を最適に配置するため、動作を横方向にオフセットすることを選択しました。
ただし、Smart Armプロテーゼが突きつける課題はこれだけではありません。プロトタイプは、サイバスロンに参加するために設計されたものであるため、実験室外での広範囲かつ激しい使用に耐えることができなければなりませんでした。このため、堅牢で完全組込み式デバイスを設計する必要がありました。
高い制約を伴うモータ
プロトタイプのモータの選択は非常に重要であり、さまざまなパラメータを考慮する必要がありました。プロトタイプに使用されているギアモータは、非常に激しい間欠運転を行うため、エルボ関節にはウォームギアが使用されておりります。これは効率が低く、乾燥摩擦が大きく、起動が困難でした。また、被験者は、常に走ったり歩いたりしてプロトタイプを携帯するため、電源電圧の変動が大きく、かなりの衝撃や振動が発生することも考慮に入れる必要がありました。
SAMプロテーゼの外骨格肘関節の開発には、6か月間にわたる作業が必要でした。このプロテーゼの運転に、同チームはmaxonのモータを使用することを選択しました。「人間の肘は、150°/sを超える速度で約 15N/m のトルクを生成します。このような特性を小さなジョイントとバッテリー駆動で再現するために、私たちは非常に高性能で小径ギヤードモータを探していました。そこで、maxonのDCX-GPXモータギアボックスシリーズに注目しました」とナタナエル・ジャラッセ氏は説明します。ISIRでは、さまざまな研究プロジェクトで開発されたロボットのプロトタイプにmaxonのモータが使用されることは珍しくありません。「maxon製品の利点は、非常に幅広い小径アクチュエータと、完全にカスタマイズされた特性を備えた市場用モータを提供していることです。これにより、事前設計段階でデバイスの最適な寸法を決定することができます」とSmart Armの同プロジェクトマネージャは補足しています。ソルボンヌ大学の研究チームは、アクチュエータをオンラインで構築およびカスタマイズできることを特に高く評価しました。 さらにmaxonは、エンジニアの専門知識を活用した技術サポートも提供しました。

Smart Armチームは、サイバスロン2020で公開する彼らの専門知識が、革新技術として商用製品に移行できるようになることを願っています。同チームは、身体の動きに基づいた義肢制御の画期的な技術アプローチにより、メーカーとのパートナーシップを締結し、多くの人々がこの革新技術の恩恵を受けることができると確信しています。「多くの課題はありますが、障がいを持つ人々を支援する技術を開発することは、非常に有意義でやりがいがあります」とナサナエル・ジャラッセ氏は述べています。Smart Armチームはこのプロジェクト全体を通して、デバイスを装着したいと願う人々に、便利で許容可能な、適切なツールを開発するために真摯に取り組んできました。maxonは、この純粋な熱意に満ちたプロジェクトの一助を担うことができたことを、とても誇らしく思っています。
詳細情報はSmart ArMのウェブサイトをご覧ください。