Expert Blog
ブラシレスモータのセンサレス制御


センサレスのブラシレスモータは、多くのアプリケーションに最適なドライブです。このモータには、さまざまなオプションが提供されています。maxon が開発したこの方式は、精度と信頼性において新たな基準を打ち立てています。
ブラシレスモータを駆動するには、正確な整流を確保する制御電子回路が必要です。ただしこれは、制御電子回路が常にローターの正確な位置を「検知」している場合にのみ実現可能です。従来この情報は、センサ、すなわちモータ内部に取り付けられたホールセンサによって検知されていました。ただし、その他にも方法はあります。センサレス制御方式では、モータの電流と電圧の情報を使用して、ローターの位置を決定します。モータ速度は、ロータ位置の変化から導き出すことが可能です。この情報は速度制御に使用されます。さらに高度なセンサレス制御方式では、電流 (トルク) と位置を制御することもできます。センサを除外することで、ケーブル、コネクタ、敏感な電子回路が不要になるため、低コストおよび省スペースといった、さまざまな利点を得ることができます。
maxon のセンサレスコントローラには、maxon BLDC モータに固有の 3 つの基本原理が採用されています。
原理 1: ゼロ通過点を検出する起電力 (EMF) 方式
ゼロ通過点を検出する起電力 (EMF) 方式では、ブロック整流時に非給電フェーズで誘導電圧 (または 起電力) を使用します。ゼロ通過点は転流間隔の途中で発生します (図 1)。次の整流ポイントまでの遅延時間は、前の整流ステップから推定することができます。
起電力 (EMF) は停止時にゼロになるため、ゼロ通過点を検出する起電力 (EMF) 方式は、速度が高い場合にのみ機能します。モータをの起動するには、ステップモータ制御と同様に特殊なプロセスが必要となり、個別に構成する必要があります。本来のセンサレス整流は、500~1000 rpm 以上のモータ速度でのみ適用することができます。整流ステップ周波数は、速度制御に使用されます。フィードバック情報が限られているため、モータダイナミクスが一部制限されますが、これは推定方法を制御アルゴリズム (オブザーバ、カルマンフィルタなど) に統合することで改善することができます。ゼロ通過点を検出する起電力 (EMF) 方式には、さまざまな利点もあります。たとえば、この方式はあらゆるブラシレスモータモデルで使用することが可能で、堅牢で費用対効果に優れています。この方式は、maxon ESCON Module 50/4 EC-S など、多くの標準製品で使用されています。
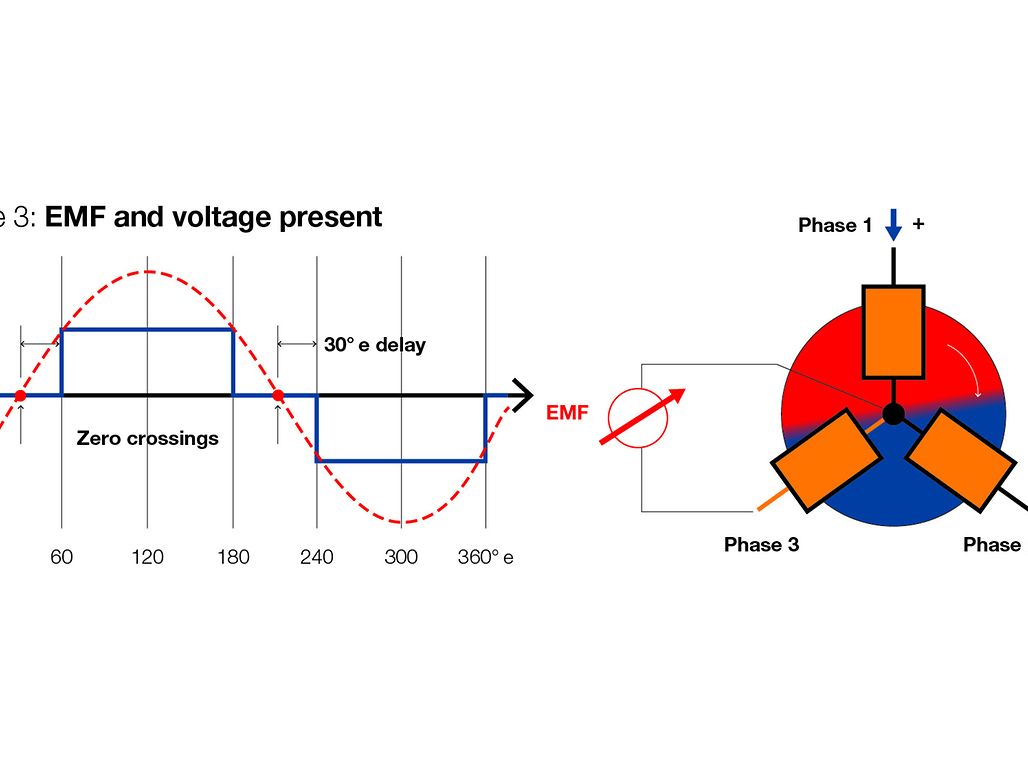
図 1: ゼロ通過点を検出する起電力 (EMF) 方式のセンサレス整流の概略図。ここでは位相 3 を例として使用しています。
原理 2: オブザーバによる起電力 (EMF) 方式
オブザーバまたはモデルベースの起電力 (EMF) 方式は、モータ電流に関する情報を使ってロータの位置と速度を決定します。モデルベースのアプローチにより、ロータ位置の分解能が飛躍的に向上します。これにより、正弦波整流 (または FOC フィールド指向制御) が可能になり、高効率、低発熱、低振動、低騒音といった利点が得られます。ただし、オブザーバベースの起電力 (EMF) 方式が適切に機能するには、数百 rpm 以上の速度が必要です。
原理 3: 磁気異方性方式
磁気異方性に基づくこの方式は、モータのインダクタンスからロータの位置を推定し、ロータとステータの磁気の流れが磁気リターンで平行である場合に最小になります (図 2)。測定は、モータを作動させない短い電流パルスで行われます。起電力 (EMF) ベース方式とは異なり、この方式は静止時または非常に低速である場合でも機能し、正弦波整流を適用できます。測定信号は、モータのタイプに大きく依存します。ロータの位置は、モータのモデルによって決定されますが、モータごとにパラメータ化し、適合させる必要があります。このため、磁気異方性に基づくコントローラは非常に特殊な製品であり、故に「プラグ アンド プレイ」のオプションは提供されていません。ロータ位置を評価するために必要な計算により、最大速度も制限されます。
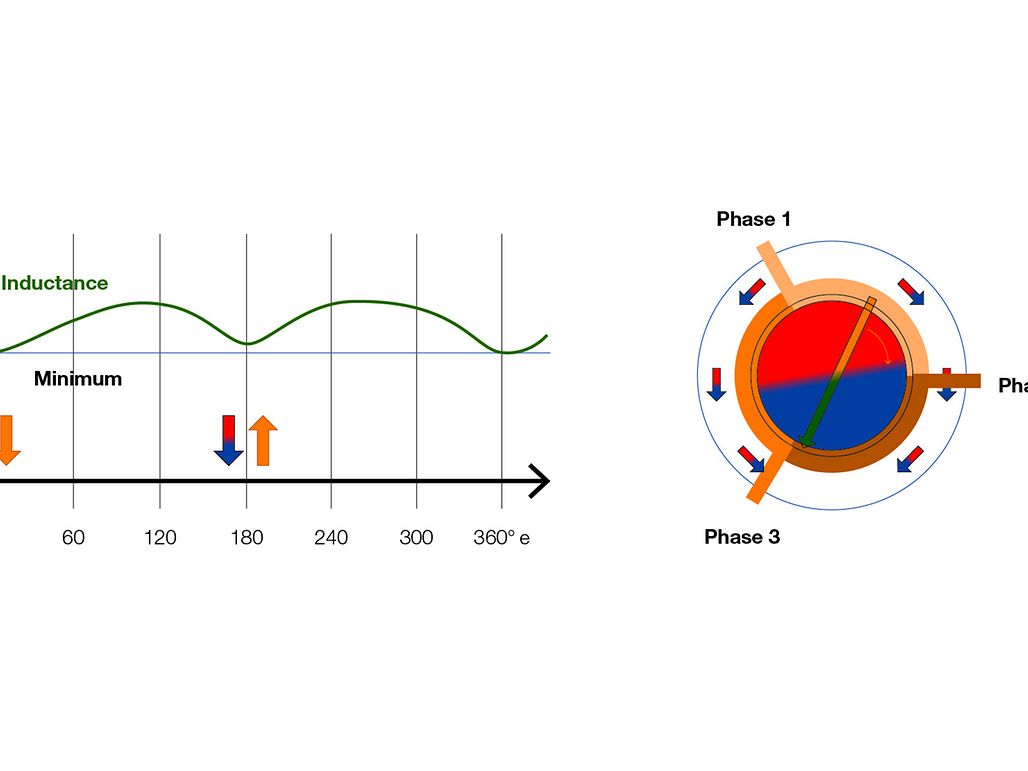
図 2: インダクタンス異方性の模式図。これは、電気角 180 度の距離にある 2 つのほぼ同一の最小値を示しています。
センサレス制御を使用する理由は?
低費用であることが求められるアプリケーションでは、センサレスモータを使用することでコストを削減することができます。その場合、ホールセンサ、エンコーダ、ケーブル、コネクタが不要になります。この分野の主なアプリケーションは、ファン、ポンプ、スキャナー、ミル、ドリル、および始動に厳密な制御を必要としない、比較的緩やかな制御性能を必要とするその他の高速アプリケーションです。なお、多数適用する場合は、カスタマイズされた起電力 (EMF) ベースコントローラが適しています。
高い制御性能が求められる用途でのスト最適化
センサレス制御を選択する理由は、コスト削減だけではありません。ドアドライブユニットや自転車ドライブユニットなどのアプリケーションには、高いコントローラ性能性が必要です。これらのアプリケーションでは、高ダイナミクスと低ノイズを実現する正弦波整流と同様、回転数ゼロからのアンチジャークモータ制御が重要となります。これらすべてを、高価なエンコーダを使用せずに実現する必要があります。ここ数年では、maxon の新型高性能センサレスコントロール (HPSC、下記参照) を含む、異方性方式をベースとした高品質のセンサレスコントローラが確立されています。ただし、モデルパラメータを適合させるときのエンジニアリング作業負荷が高いため、見合った価値を享受することが可能となるのは、数百を超える大量生産を行う場合のみとなっています。
困難な周囲条件
センサレス制御は、脆弱なセンサ電子回路をモータ内に装備することを回避する必要がある場合にも必要になる場合があります。たとえば、極端に高いまたは低い周囲温度での用途、医療技術分野での洗浄と滅菌、または宇宙空間の電離放射線、原子力施設、または医療環境で適用することができます。また、モータコネクタの数が少ないため、スペースが限られている場合でも容易に統合できます。
必要な制御性能はアプリケーションによって異なります。どのセンサレス方式が最も適しているかは、各用途に応じて決定する必要があります。たとえば、ドリルや研削用のハンドヘルドツールには、高速であることが求められますが、手術の際にボルトを固定するには、低速で制御されたトルクが必要となります。
結論
センサレス制御を選択する主な理由は、「コスト削減」、「省スペース」、「センサに不利な環境での適用」の 3 つです。ゼロ通過点を検出する起電力 (EMF) 方式は、高速で適用され、コスト重視の幅広いアプリケーションで適用されています。静止状態や低速でのセンサレス制御には、より高度な方式が必要です。実装作業にはモデリングとパラメーター化が含まれ、作業負荷はより膨大になります。コスト削減は二次的な効果です。フィールド指向制御により、効率が向上し、熱蓄積は低減し、振動と騒音も低減します。これらのメリットは、主にハンドヘルド式の医療機器で発揮されます。

maxon のセンサレスコントローラ
maxon が新開発した HPSC Module 24/5 (高性能センサレス制御) は、ハードウェアと顧客固有のソフトウェアを統合したプラットフォームです。HPSC はカスタマイズされたソリューションであるため、カタログ製品ではありません。この開発が特別である理由: 静止時と低速時には、磁気異方性制御技術が優先的に使用されます (原理 3)。次に、より高速になると、オブザーバに基づく起電力 (EMF) 方式 (原理 2) へのスムーズな移行が行われます。モジュールのファームウェアは、各ドライブシステムごとにカスタマイズされています。特殊な調整プロセスでは、120 以上のパラメータが各モータの「特性」に合わせて自動的に調整されます。HPSC の使用例には、maxon が最近開発したハンドヘルド型医療ツールがあります。
_ESCON Module 50/4 EC-S は、製品カタログに記載されている maxon の唯一のセンサレスコントローラです (起電力 (EMF) 方式によるブロック整流とゼロ通過点検出)。センサレスコントローラ 24/1 は、最小 EC モータ (直径約 10 mm 未満) の代替となる製品です。ただし、カタログや E ショップでは提供されていません。