maxon Story
走れ、恐竜

恐竜がルームランナーの上を走る姿は日常的に目にするものではありません。しかし、韓国の「KAIST」ラボではこれは当たり前の光景です。このラボでは時速46 kmで走れる歩行ロボットが開発されました。ロボットをサポートしているのがマクソンの高性能ブラシレスモータです。



maxon EC-4pole 30 HP - 直径30 mmのこのハイパワーモータは、200 Wの出力を実現します。4磁極のブラシレスドライブシステムは高い出力性能を誇ります。
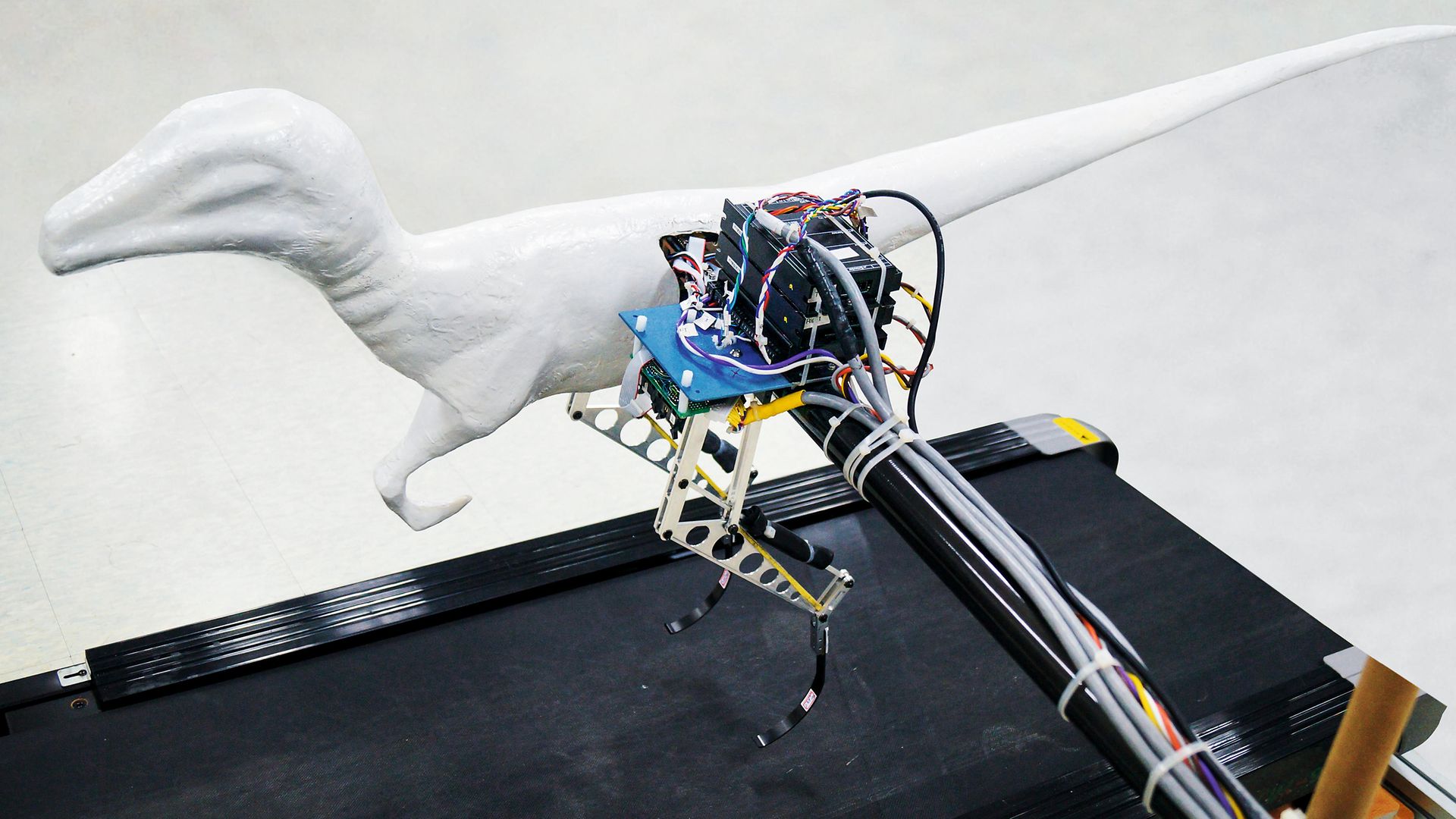
時速46 ㎞というスピードで疾走するこの俊足ロボット「ラプター」は、世界最速の二足歩行ロボットです。ラプターは100メートルをわずか7.8秒で走り抜けます。これは、現時点での世界記録保持者ウサイン・ボルトの9.58秒を超える速さです。
韓国科学技術院 (Kaist) の研究者たちは、ヴェロキラプトルという恐竜を参考にしてこのロボットを設計しました。発案から最終的な恐竜ロボットの完成までには2年もの歳月がかかりました。砂利道や道路の上をハイスピードで安定して走れるロボットを作るのは、決して簡単なことではなかったからです。ラプターの身長は50センチ弱で、重量はわずか3 ㎏です。足は炭素繊維強化プラスチック製で、足を踏み出すときに人工の腱が張り、次の一歩のためのエネルギーが蓄えられます。
ロボットの2本の脚はそれぞれマクソンのブラシレスDCモータによって駆動されます。このドライブシステムは出力200 Wの強力なEC-4pole 30モータ、プラネタリギアヘッドGP 32 HP、MRエンコーダの組み合わせから構成されており、制御にはmaxon ESCON Module 50/5が用いられています。ラプターの特長のひとつは、歩行中のバランスを保つ能力です。
ラプターには身体を安定化させるために高速回転する棒が備わっており、その中に回転運動を行う別のEC-4poleモータが搭載されています。それによって10 cmまでの高さの障害物であれば、体勢を崩さずにスムーズに飛び越えることができます。ラプターは現時点では支持具が取り付けられた状態でしか歩行できませんが、研究者たちは今後の改良によって自由歩行が行えるようにすることを目指しています。ラプターが将来、監視ロボットや救急ロボットして活躍する日が来るかもしれません。