Expert Blog
古田振子を安定させるMiniMACS6


回転倒立振子は、工学における古典的な問題です。この回転倒立振子は、機械工学だけではなく、制御および電気工学における動力パターンと制御アルゴリズムを実証および調査するために使用されます。これらは、ロボットやその他の機械の制御に役立っています。
発明者である古田勝久氏にちなんで名付けられたこの振子の構造は単純です。駆動アームは水平面内で回転し、そのアームに取り付けられた振子は垂直面内で回転します。理論的モデリングとこれらの動きを安定させる必要性は、これまで長い間エンジニアを悩ませてきた問題です。古田振子には、回転関節の方向と振子の方向という2つの変数があり、制御が可能となっています。振子は垂直の不安定な位置で制御され、アームは任意の位置で制御されます。非線形で不安定なこのシステムは、実験の実施、既存の制御アルゴリズムのテスト、および新しい計算方法の開発に適しています。これが、ロボット工学、制御理論、コンピュータ制御などの研究分野からのアプローチを組み合わせたものとなっていることも珍しくありません。
正しいコントローラの開発
適切なコントローラは、さまざまな設計ストラテジーを使用して開発することができます。倒立振子に適したコントローラ構造には、PID、LQR、ファジー、または自己学習ニューラルコントローラがあります。複数の自由度を持つ物理システムは、数学的にモデル化することが可能です。静止位置 (ゼロ位置) からの振子の振り上げには、エネルギーアプローチなどの非線形アプローチが必要です。次に、数学的記述を使用して適切なコントローラを設計します。このコントローラは、リアルタイム対応システム向けに近似化または離散化したうえで、MiniMACS6-AMP4などのコントローラに転送することが可能になります。
コンパクトコントローラ
maxon MiniMACS6-AMP4は、統合式パワーステージを備えたプログラマブルマスターコントローラです。またこれは、回転倒立振子のスタビライザーコントローラです。このコントローラにより、単純なコマンドで複雑な動作パターンを実行することが可能となり、たとえば、回転するマスター軸とのジャークフリー同期などを実現することができます。MiniMACS6-AMP4多軸コントローラのメリット:
- マスター機能を持っているため、上位コントローラが不要
- ライセンスフリーのモーションコントロール機能を搭載
- 統合式パワーステージを備えたコンパクトなドライブソリューション
ライセンス不要の自動化ソフトウェアApossIDE (統合開発環境) を使用すれば、簡単なコマンドで位置決めおよび同期タスクを設定したり、C (ApossC) を用いて独自の制御アルゴリズムを実行したりできます。#
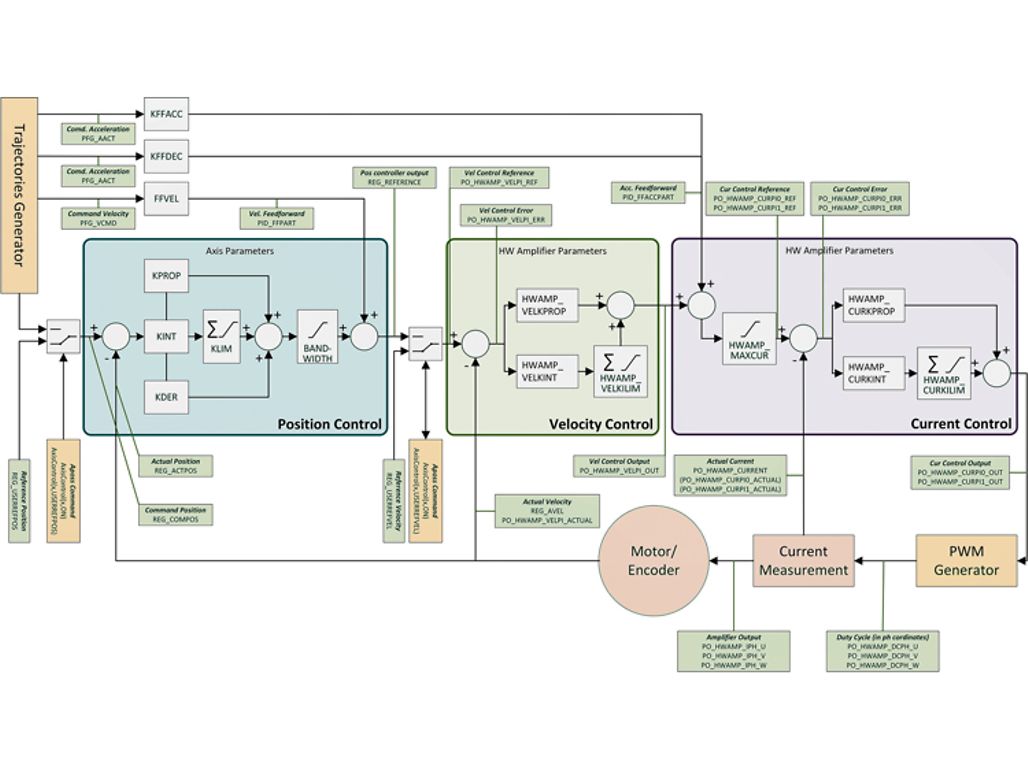
カスケード制御 - MiniMACS6-AMP4などのmaxonモーション コントローラを使用したカスケード制御の例。プログラマビリティと統合されたパスプランニングにより、上位レベルのコントローラの絶対的必要性がなくなります。
作動例: MiniMACS6-AMP4が回転倒立振子を安定させます。
COMPACT MiniMACS6-AMP4多軸コントローラ
統合パワーステージを備えたプログラマブル多軸コントローラは、回転倒立振子を安定させるコントローラであり、回転軸とのジャークフリー同期を保証します。
最新号
ドライブ技術のあらゆる情報に関するエキサイティングなストーリー、驚くべき事実、興味深い技術記事を掲載したmaxonのDrivenマガジンの最新号をお読みください。最新号は弊社ウェブサイトでお読みいただけます: maxongroup.com/driven
