maxon Inside
エンコーダの選定 – パート 3: 回転数制御

一般的な詳細分析により、精密な回転数制御を行うには、最高レベルのエンコーダ分解能が必要であることが実証されています。エンコーダ分解能は、要求される回転数精度の 2 乗に比例して増加します。さらに、高速制御ループが必要となり、質量慣性が高くなると、回転数安定性に良好な効果が出ます。
- 次の点に注意してください:精密で動的な回転数制御に影響を与えるのはエンコーダ分解能のみではありません。システム全体が回転数制御に影響します。応答時間は、電源とコントローラの電流と電圧の制約、制御ループのサンプリングレート、質量慣性、摩擦変動、および機械的な遊びによって制限される場合があります。
インクリメンタルエンコーダの回転数評価はどのように機能しますか?
回転数は、一定時間における状態遷移数をカウントすることによって、コントローラ内で評価されます。たとえば、EPOS2 の回転数コントローラのサンプリングレートは 1 kHz です。このため、内部回転数は、500 cpt エンコーダ (1 回転あたり 2000 qc) で 30 rpm の回転数分解能に相当する 1 ms あたりのクワッドカウント (qc/ms) の整数で測定されます。エンコーダ分解能が低いほど、この回転数量子化は高速になります。
これは、デジタルで情報を取得していることに起因する、計測学的な問題であることを強調しておかなければいけません。測定結果はシステムの動作と完全に一致しているわけではありません。モータの実際の回転数は設定値を想定し、機械的な慣性モーメント (フライホイール効果) によって維持されています。測定値は、この平均回転数近辺で変動するのみとなります。
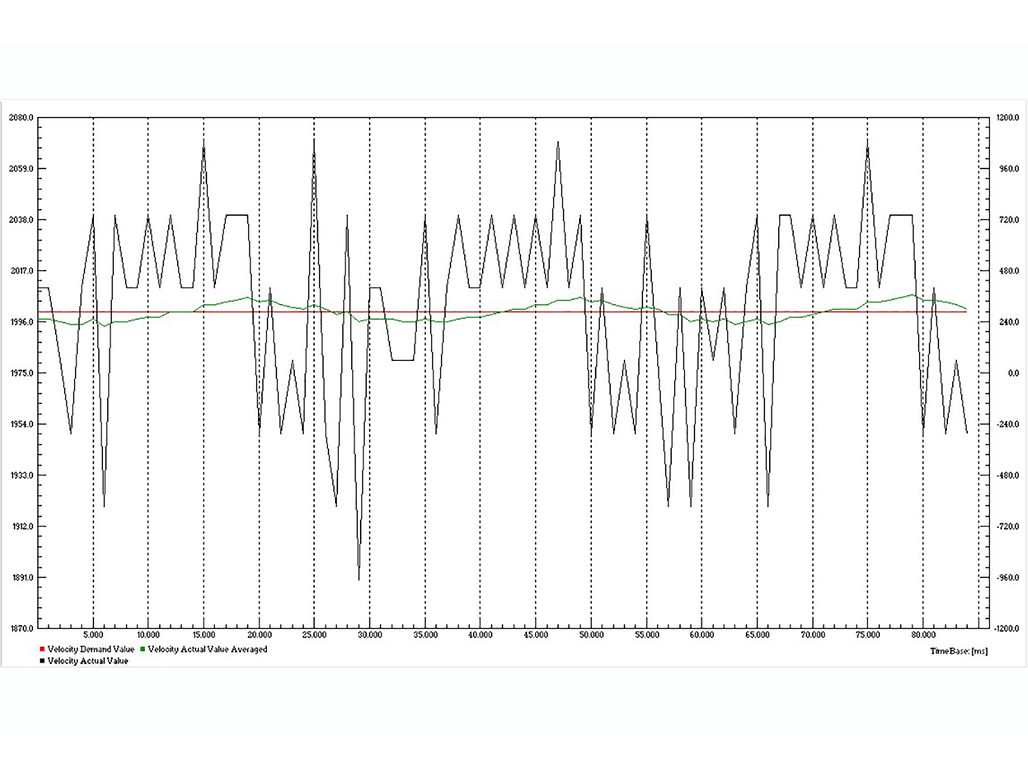
maxon MR エンコーダでモータに記録された回転数信号。(EPOS2 Studio Data Recorder のスクリーンショット)。黒い線はセンサの回転数読み取り値です。1qc/ms の分解能に相当する 30 rpm のステップでジャンプします。また、信号の周期は、モータ 1 回転の時間である 30 ms です。緑色の平均回転数は、この周期性をより明確に示しています。この平均回転数信号は、モータの実際の回転数により近いものとなっています。ただしこの場合は、エンコーダが不完全であることが反映されています。ところで、平均化された信号の回転数精度は 2000 rpm の回転数で約 3 rpm の偏差です。これはむしろ良好な状態です!
高回転数での回転数制御
エンコーダの電気的コンポーネントは、処理できる最大パルス周波数を制限します。このため、エンコーダの最大回転数も制限されることになります。場合によっては、この制限は、不均衡や組み立て公差などの機械的な注意事項によって起こります。
コントローラ側のエンコーダ入力の周波数制限も考慮する必要があります。非常に高い回転数が要求される場合は、これに応じて、分解能が低いエンコーダを選定する必要があります。
数千 rpm の高回転数の数パーセントの相対回転数変動は、数 10 rpm の絶対精度に相当し、非常に容易に達成することができます。
ルール #4: 高回転数制御用エンコーダ (> 500 rpm)
状態数が中程度または少なく、最大定格回転数が高いエンコーダを選択します。多くの場合、maxon EASY エンコーダが最適なソリューションです。通常、高精度の光学式エンコーダは必要ありません。経験則: (回転数 rpm) x (エンコーダ分解能cpt) > 100'000 rpm cpt は、ほとんどのアプリケーションに適しています。
低回転数での回転数制御
状態変化カウント式の回転数評価は、高い回転数では良好な回転数制御を行うことができますが、回転数が非常に低いと制御が困難になります。たとえば回転数が 60 rpm である場合は、1 秒あたり 1 回転で、5% または 3 rpm の精度を維持する必要があります。上記と同じ 500 cpt エンコーダと 1 ミリ秒の制御サイクル時間では、安定してスムーズに制御した回転数を得ることはできません。
絶対回転数の変動を低減するには、より高いエンコーダ分解能とより高速なコントローラが必要になります。上記の状態で、5000 cpt のエンコーダを想像してみましょう。10 倍以上のフィードバックが取得されるはずです。ただし、低回転数であっても、絶対回転数偏差を低く維持するために、制御ループはより高速に反応することができなければいけません。どちらの要件も、エンコーダに対する要求を高めるものです。エンコーダ分解能は、絶対回転数安定性の 2 乗に比例して増加します: 許容回転数変動の半分では、4 倍のエンコーダ分解能が必要になります。
回転数が非常に低い場合、一部のコントローラでは別の方式で回転数を評価することが可能です。この方式では、2 つの状態の間の経過時間を測定します。この場合、回転数フィードバック値はより均一になり、堅固で動的な制御が可能になります。
EPOS4 コントローラを使用すると、低回転数の場合、回転数オブザーバと呼ばれる別の方式を使用することができます。回転数オブザーバは、制御ループ内に含まれる要素であり、観測された回転数を 2 段階で計算します。まず、システムの機械的伝達機能を定義するパラメータに基づいて、回転数、位置、および外部トルクが予測されます。次に、新たに測定されたロータ位置に基づいて予測値が修正されます。
ただし、この場合も高分解能エンコーダと高速コントローラのほうが、より良好な効果を発揮します。
ルール #5: 低回転数制御エンコーダ (< 100 rpm)
高速コントローラと組み合わせて、状態数が多い、または非常に多いエンコーダを選択します。