Expert Blog
エンコーダの選定 - パート 1: 特性

アプリケーションに適したエンコーダは、どのように選定すればよいですか?このブログでは、いくつかの選定方法をご紹介します。
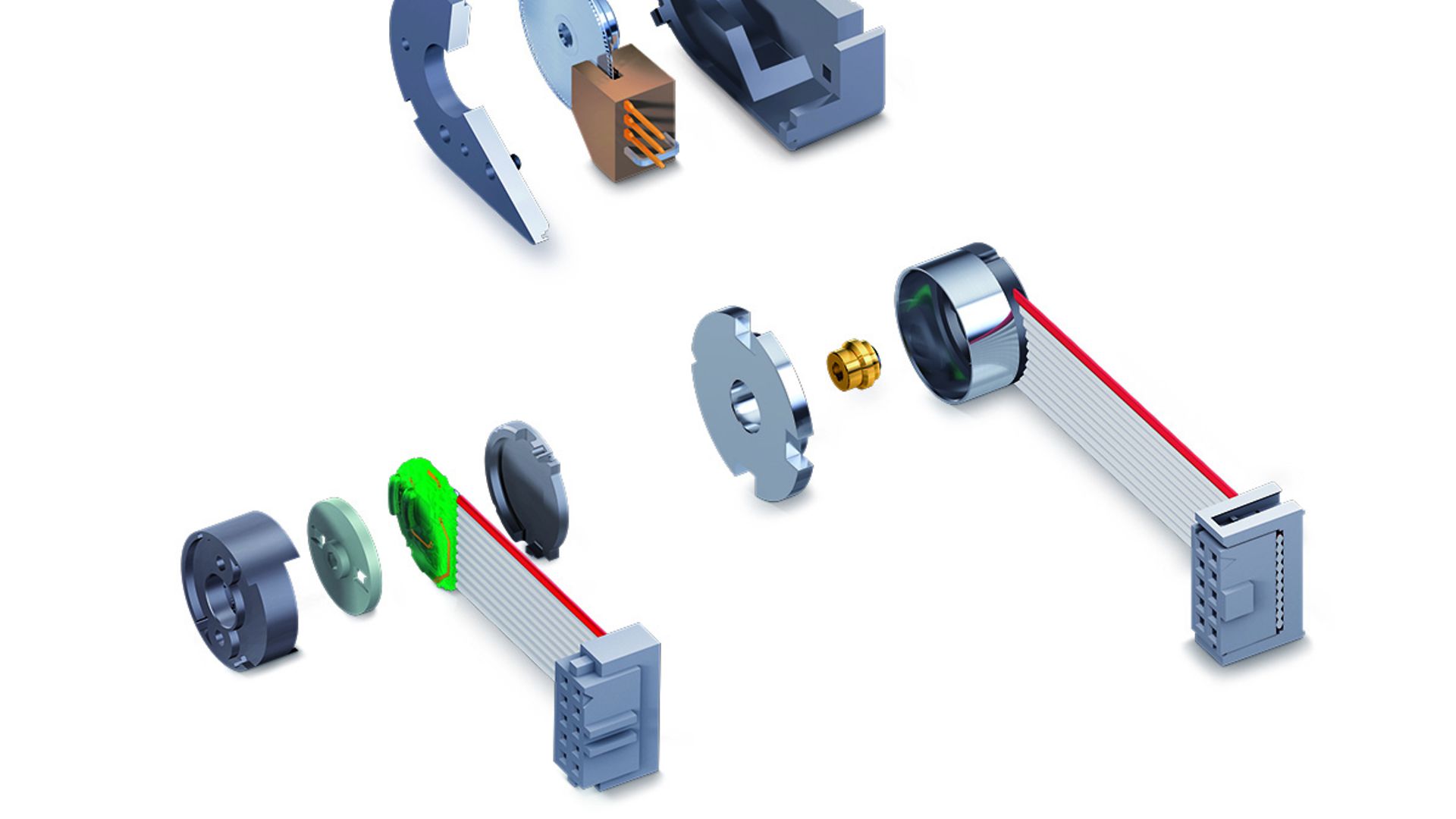
小型モータを使用するアプリケーションで主に選択されるフィードバックセンサは、デジタルインクリメンタルエンコーダです。この連載ブログでは、位置および回転数制御のアプリケーションでの選定を詳細に吟味する前に、まずはエンコーダの最も重要な特性について再考します。
典型的な要件は何ですか?
アプリケーションは、すべてそれぞれ異なります。その主な用途は、位置制御または回転数制御です。回転数または位置制御の精度レベルは、それぞれ大きく異なる場合があるため、エンコーダを選択する前に定義する必要があります。低回転数 (100 rpm 未満) での回転数制御には、高回転数 (1000 rpm 以上) での回転数制御よりも高度なフィードバックが必要です。
負荷はモータに直接結合することができます。または、ギアヘッド、ネジなどの機械的変換システムを利用することも可能です。通常、エンコーダはモータシャフトに取り付けられていますが、負荷自体に取り付けることも可能です。エンコーダの選定には、変換機構の機械的特性が影響します。ギア減速と機械的バックラッシュを考慮してください。
温度、振動、電磁干渉などの環境条件も、エンコーダの選定に影響を与える場合があります。たとえば、光学式エンコーダは塵埃から保護されなければなりません。磁気エンコーダは、モータからの磁界を含む外部磁界に対して感度が高い場合があるため、シールドが必要となる可能性があります。
インクリメンタルエンコーダの主な特性は何ですか?
インクリメンタルエンコーダの特性パラメータは、モータ 1 回転あたりの矩形パルス数です。通常は、同じパルス数を提供する 2 つのチャンネルがあります。この 2 つの信号は、パルス長 4 分の 1 の相対位相シフトを有しています。この配置により、モータの回転方向が検出され、1 パルスあたり 4 つの異なる状態が認識されます。ときに、これらの状態はクワッドカウントと呼ばれます。この状態は、1 つのチャネルで、実際の分解能がパルス数の 4 倍であることを表しています。1000 cpt (1 回転あたりのカウント数またはパルス数) のエンコーダは、1 回転あたり 4000 状態、または 360°/4000 = 0.09° の公称分解能を発揮します。
観察: エンコーダの分解能について議論する際は、チャンネルあたりのパルス数 (cpt) のことを話しているのか、または状態遷移 (クワッドカウント) のことを話しているのか、全員が認識を共有しているようにしてください。
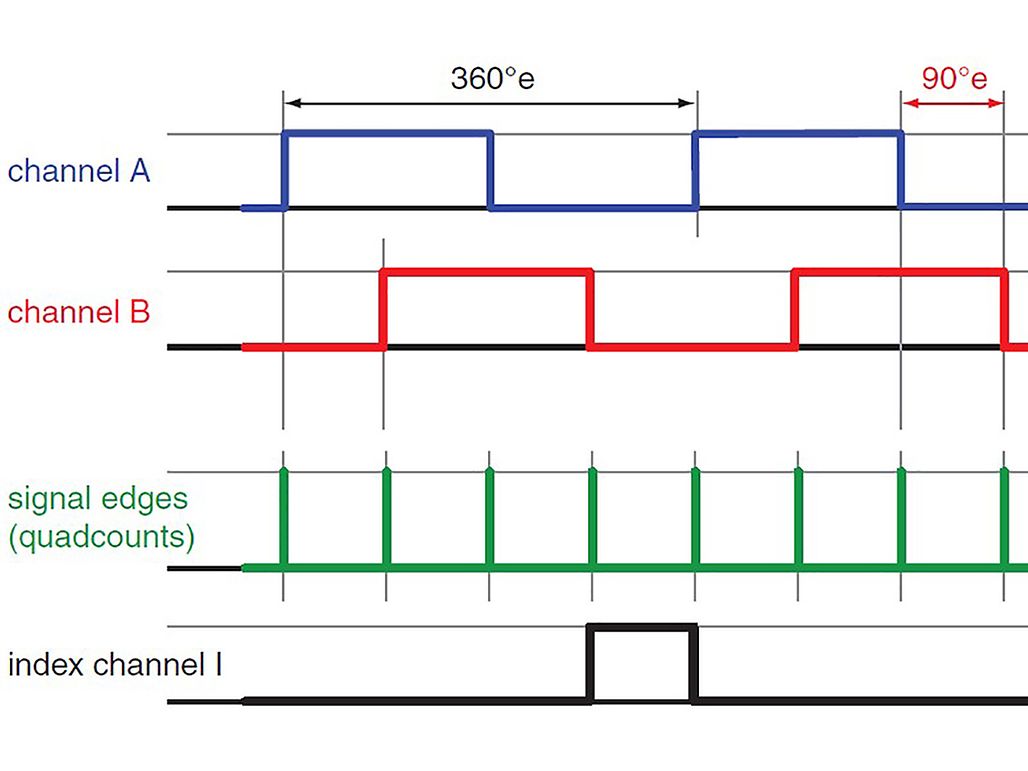
デジタルインクリメンタルエンコーダの信号。状態変化 (チャネル A と B の信号エッジ) をカウントすると、1 つのエンコーダチャネルの 1 回転あたりのカウント数よりも 4 倍高い分解能が得られます。
エンコーダ分解能は多岐にわたります。動作を検出するためだけに使用する非常に単純な 1 cpt (または 4 ステート) のエンコーダから、精密な位置または回転数フィードバックを行うための最大数 10,000 cpt のエンコーダがまで、非常に広範囲です。実現可能なエンコーダ分解能は、基本的な物理原理 (光学、磁気、誘導など)、主要な信号の種類 (アナログまたはデジタル)、信号処理 (補間など)、および機械的レイアウトなど、多数の要因から影響を受けます。しかしながらこのブログでは、エンコーダの設計についてではなく、特定のアプリケーション制御要件を適切なエンコーダで満たす方法について説明します。
エンコーダの精度はどのくらいですか?
分解能 (状態数) は公称精度を示し、位置は 1 状態の誤差内で検知されます。ただし、エンコーダのパルス長は、機械的公差 (シャフトの振れ、磁極の長さなど) によって変化する場合があります。モータ回転の 1 つの範囲のパルスは、他の範囲のパルスよりも短い場合があります。結果として、測定された位置は、モータ 1 回転において周期的に実際の位置からずれることになります。
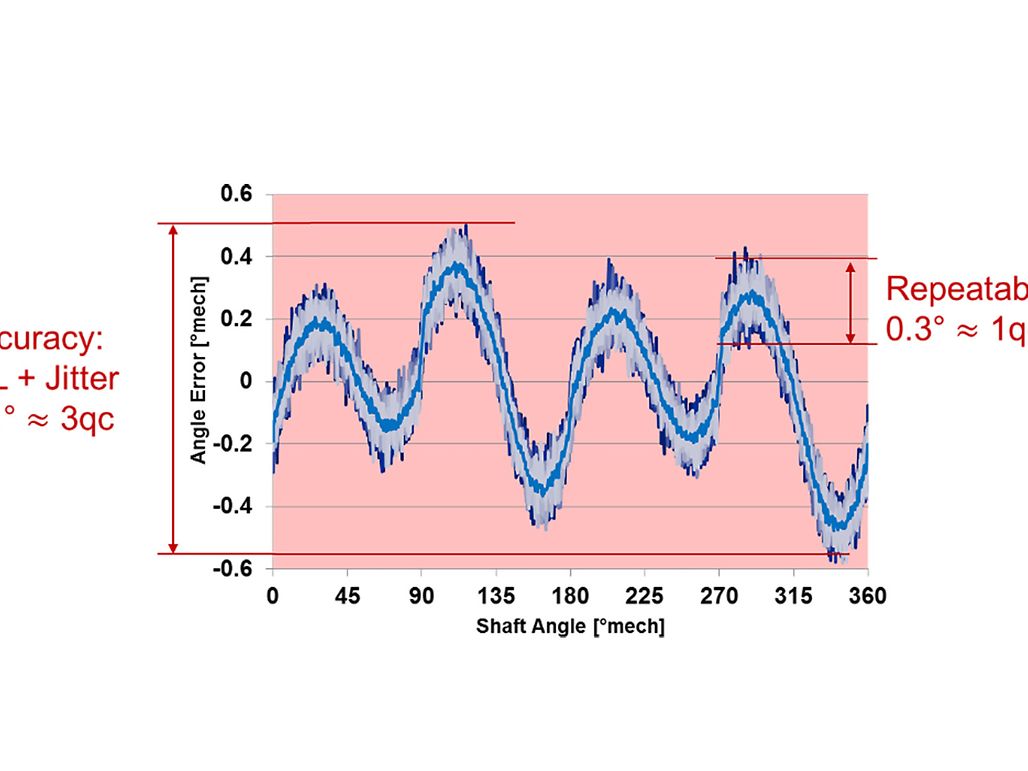
256 cpt の磁気補間エンコーダの非直線性の測定例。完璧な位置からの偏差は、エンコーダ信号 (1024 クワッド カウント) の関数として表示されます。この図は、1 回転を 25 回測定した測定値で構成されています。1 回転後に偏差が繰り返されることがはっきりと分かります。平均絶対位置からの偏差は約 +/- 0.45°、または、積分非直線性誤差 (INL) は約 0.9° です。規定のエンコーダ位置での信号ノイズ (ジッタ) は約 0.3° であり、これは 1 状態の変化 (360° / 1024 = 0.35°) に正確に対応します。
最大偏差 (ピーク ツー ピーク) は、積分非直線性誤差 (INL) と呼ばれます。INL は、絶対位置精度を必要とするアプリケーションで重要となります。繰り返し精度 (つまり、特定の設定値に対して常に同じ位置に到達すること) は、INL の影響を受けません。繰り返し精度は、信号ジッタに影響を受け、通常は 1 状態未満になります。
インクリメンタルエンコーダと絶対位置とは?
インクリメンタルエンコーダは、位置の変化のみを検出するものです。絶対的な位置決めを行うには、システムはまず、参照ポイントまたはゼロ位置で設定しなければいけません。これは、メカニズムを外部基準位置に移動することによって達成されます。このような参照ポイントは、リミットスイッチや機械的なストッパーである可能性もあります。
一部のエンコーダには、1 回転あたり 1 パルスの 3 つ目のチャンネルが装備されています。このインデックスチャンネルのエッジは、1 回転以内の絶対位置基準を表します。外部参照の精度の制限は、インデックスチャンネルエッジの 1 つに追加的に移動することで改善できます。ただし、インデックスチャンネルは位置決めの前提条件ではないことにご注意ください。実際、機械メーカーは、モータエンコーダユニットを交換する必要がある場合は新しいキャリブレーションが必要になるため、インデックスを参照に使用することを避けます。さらに、一部のコントローラは、インデックスチャンネルを使用してエンコーダ信号をクロスチェックし、回転ごとのエンコーダカウントを監視します。
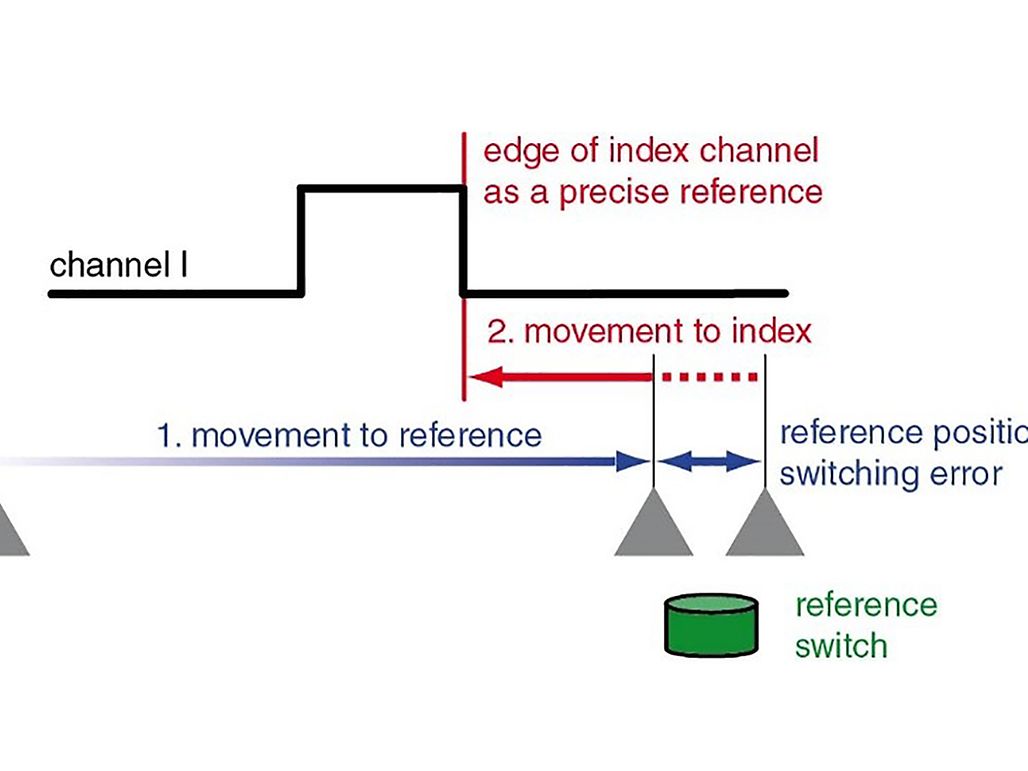
インデックスチャンネル信号のエッジに追加的に移動することで、参照ポイントの精度が向上します。
信号を送信する際には、何に注意するべきですか?
ラインドライバは、長いラインでの伝送と信号品質の向上を行うために使用することが推奨されています。位置決めには、エンコーダパルスの喪失を避けるため、ほぼすべてのケースでラインドライバを使用する必要があります。
ラインドライバは、チャンネル (A、B、I) ごとに反転信号 (Ā、B̄、Ī) を生成します。各信号ペアは一緒に送信され、その差が評価されるため、信号送信中の電磁干渉は除去されます。これによる利点として、信号品質が改善され、信号エッジがより明確に定義され、ドライバー機能により、より長い距離 (最大約 30 m) での信号の伝送が可能になります。
エンコーダには最小供給電圧が必要です。長いエンコーダラインでは、ライン抵抗とそれに対応する電圧降下が問題になる可能性があります。ケーブルの断面積と供給電圧を確認してください。
環境条件、堅牢性
エンコーダの標準動作温度範囲は -30°C ~ +100°C です。これにより、ほとんどのアプリケーションや、モータによって生成される熱にも対応できます。
振動が激しいアプリケーションや機械的衝撃のあるアプリケーションでは、堅牢な機械的ハウジングとケーブルの適切なストレインリリーフが重要です。
光学式エンコーダは電磁干渉に対して感度が低いのに対し、磁気エンコーダは漂遊磁場に対する適切なシールドを必要とします。ハウジングがしっかりと密閉されていないと、光学式エンコーダが粉塵による悪影響を受ける場合があります。
次回のブログでは、位置決め制御と回転数制御のためのエンコーダの選定について、より詳しくご説明します。