Expert Blog
デュアルループ制御: ギアのバックラッシュを解消
機械的バックラッシュや弾性コンポーネントがあっても、負荷を高精度かつ振動なしで動的に位置制御することはできますか? はい、できます。インテリジェントシステムがこれを可能にしています。
通常、電動ドライブによる負荷の移動は、モータシャフトに取り付けられたエンコーダを使用してコントローラに位置と速度情報を出力するシステムによって行われます。動的位置制御には、高いエンコーダ分解能とモータシャフトの反応を正確に検出することが不可欠です。ただし、アプリケーションにしてみれば、生産された商品の品質と寸法精度において最終的に重要となるのは、出力側の負荷の動きの精度です。ギアヘッド、スピンドル、およびドライブベルトは、これに悪影響を及ぼす可能性があります。移動方向によっては、ギアのバックラッシュにより、出力側の負荷位置が異なる場合があります。また、これらの持つ伸縮性が、動作の開始時または停止時に遅延や振動を発生させる場合があります。最初に思いつく解決策は、モータシャフトではなく、出力シャフトにエンコーダを取り付けることです。ただし、この方法では事態が改善するどころか、システムパフォーマンスをさらに悪化させてしまいます。
バックラッシュまたは弾性のあるメカニズムの場合、動的で正確な負荷の位置決めには、2つのエンコーダシステムに基づいて制御されるシステムを使用する必要があります。
- そのうちの1つのロータリエンコーダである補助エンコーダは、モータシャフトに固定接続されています。このエンコーダは、通常はすでにモータの組み合わせの一部になっています。
- もう1つのエンコーダであるメインエンコーダは、出力側の移動負荷に接続されます。
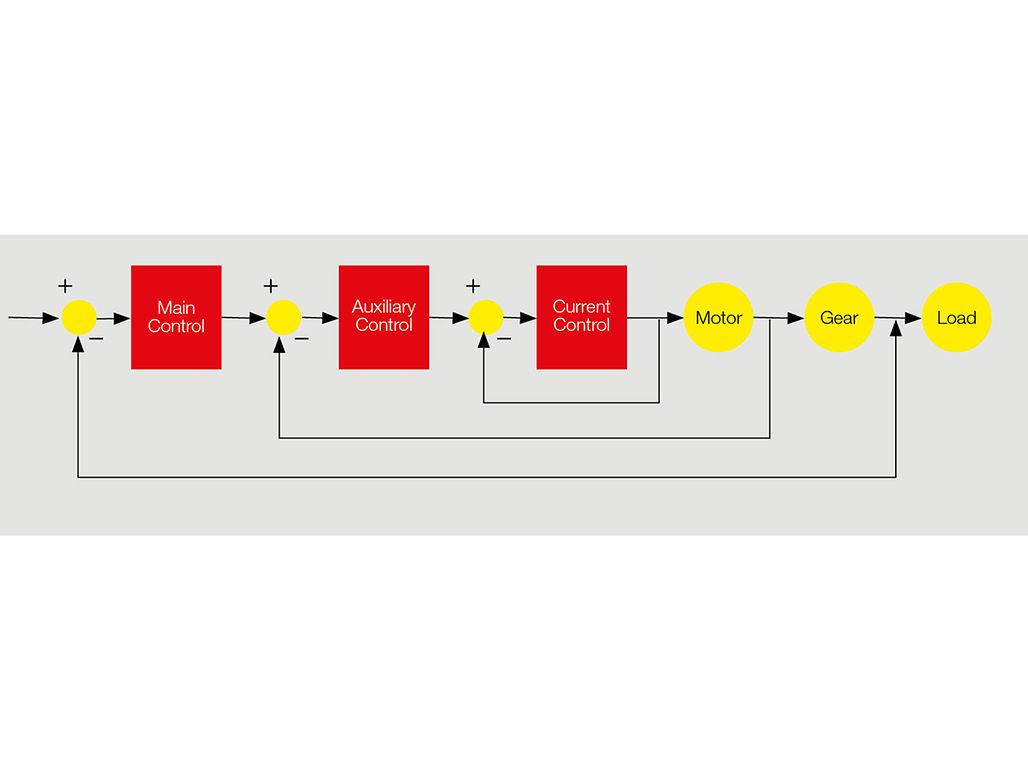
図1 3つの統合型フィードバックループで構成されたデュアルループアーキテクチャ。
これら 2つのエンコーダシステムの信号の処理には、デュアルループ制御が必要です。 maxonのEPOS4位置決めコントローラは、このデュアルループ制御を二次フィルタとゲインスケジューラで強化し、機械的共振とギアのバックラッシュを打ち消します。EPOS Studio 初期設定用ソフトウェアには、複雑なコントローラ構造のパラメータを自動的に決定するレギュレーションチューニングツールが含まれています。また、ドライブの伝達関数も記録されます。
制御アーキテクチャ
EPOS4は、デュアルループ制御にカスケード制御系構造を採用しています (図1参照):
- 最も内側の制御ループは、モータ電流測定値に基づいて、フィードバック信号としてモータ電流のフィールド指向制御 (= FOC) を提供します。
- 中央の制御ループ (補助制御) は、モータシャフトのエンコーダに基づいてモータ速度を制御します。
- 最も外側の制御ループ (メイン制御) は、負荷のエンコーダシステムに基づいて負荷の位置を制御します。
EPOS4デュアルループ制御構造の詳細図は図2に示されています。
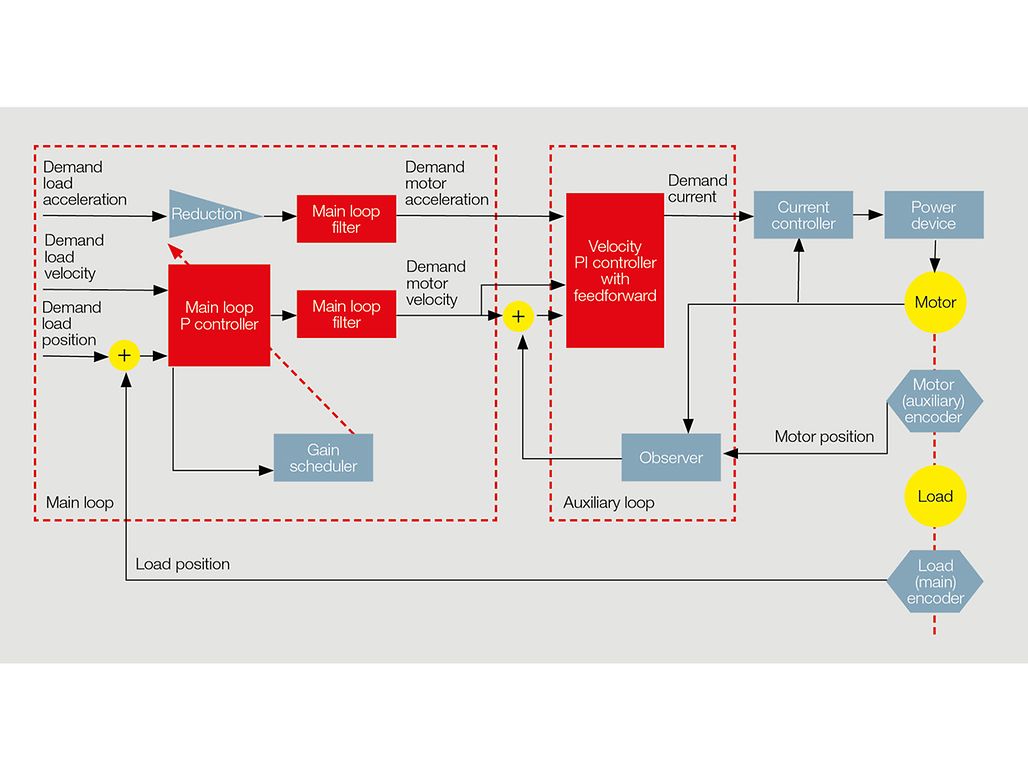
図2 デュアル ループ制御システムのすべてのコンポーネントの詳細図。
メイン制御ループ
メイン制御ループは、比例 (P) コントローラ、ゲインスケジューラ、および二次フィルタ (メインループフィルタ) で構成されています。パスプランナーは、負荷の指令位置、指令の速度および加速度をメイン制御ループの入力変数として提供します。もうひとつの入力変数は、負荷のエンコーダによって測定された、負荷の実測位置です。
- ゲインスケジューラ
EPOS4デュアルループ制御は、ゲインスケジューラを使用して、ギアのバックラッシュによる悪影響を消滅させます。ゲインスケジューラは、メイン制御ループのPゲインを自動的に調整することでこれを実現します。トラッキングエラー (指令位置と比較した実際の負荷位置の偏差) が大きすぎると、高いPゲインが適用され、エラーが急速に低減されます。トラッキングエラーが小さくなるとPゲインも低くなり、ギアのバックラッシュがあってもドライブに振動が発生しなくなります。
- メインループフィルタ
カップリング、ベルト、または長いスピンドルが原因でモータと負荷の間にある程度の弾性が生じる場合、共振周波数が増幅振動を引き起こす可能性があります。これらは、制御が不安定になるポイントまで増加することがあります。これを防ぐために、EPOS4デュアルループコントローラはノッチフィルタタイプの二次フィルタを使用します。このフィルタは、メイン制御ループからの出力信号の共振周波数範囲を抑制し、ドライブトレインの調波振動を防止します。
補助制御ループ
補助制御ループは、フィードフォワード (FF) を備えた比例積分 (PI) コントローラと、モータエンコーダの位置データとモータ電流測定値からモータ速度を推定するオブザーバーで構成されています。
オートチューニング手順
初期設定を簡素化するため、maxonのEPOS Studioソフトウェアには、デュアルループコントローラのパラメータを決定して検証するための自動チューニングウィザードが組み込まれています。オートチューニング手順は、自動的に実行される2つの検証試験で構成されています。
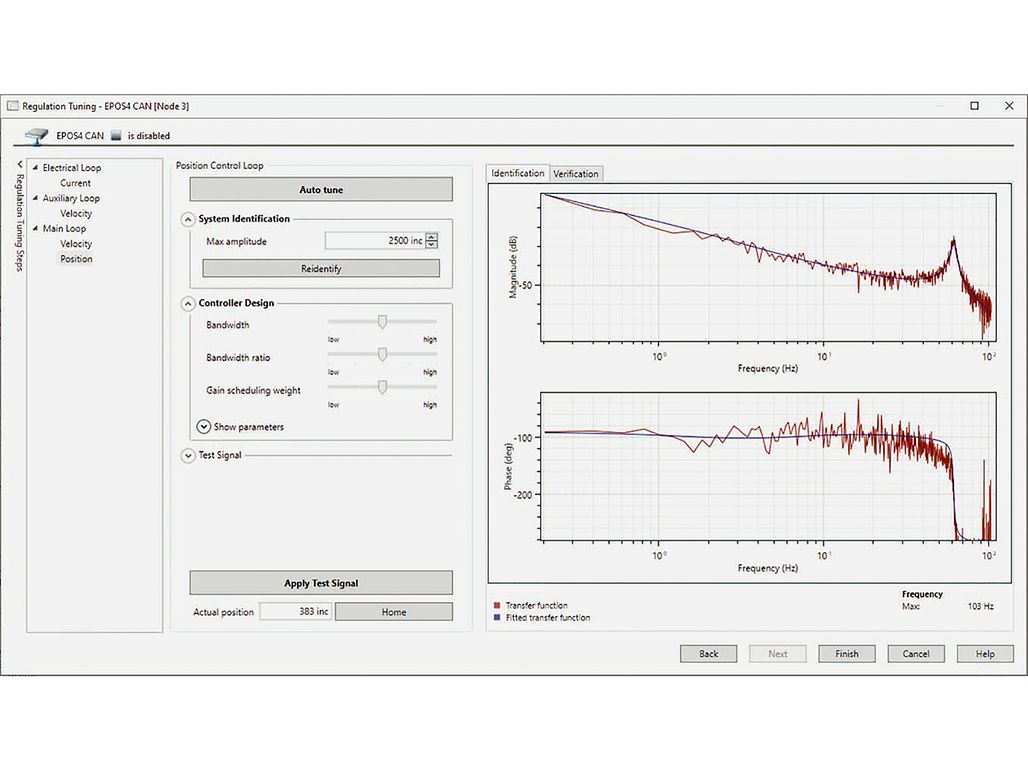
図3 EPOS4を使用して識別された伝達関数の例、共鳴あり。
- 試験1は、モータシャフトの振動を引き起こします。これらの振動は、質量慣性、トルク定数、モータの摩擦を決定するために使用されます。次に、識別されたデータに基づいて、補助ループコントローラとオブザーバのパラメータが計算されます。
- 試験2は、メイン制御ループとノッチフィルタのパラメータを計算するために使用されます。PRBS信号 (= Pseudo-Random Binary Sequence、疑似ランダム2次信号列) を使用してプラントを励起します。取得された入出力データに基づいて、伝達関数が特定され、ボード線図として表示されます(図3参照)。
ボード線図はエクスポートすることができます。これは、機械設計を最適化する際のシステム分析や、特定のアプリケーションに対する制御の手動調整において制御技術者を支援します。
シングルループ制御とデュアルループ制御の比較
次のグラフは、ギアバックラッシュのあるシステム(図4) と弾性カップリングのあるシステム (図5) の基準応答とトラッキングエラーの違いを示しています。このグラフは、負荷に取り付けたエンコーダを使用したシングルループ制御と、モータシャフトと負荷の両方に取り付けたエンコーダを使用した自動調整されたデュアルループ制御の比較を表示しています。
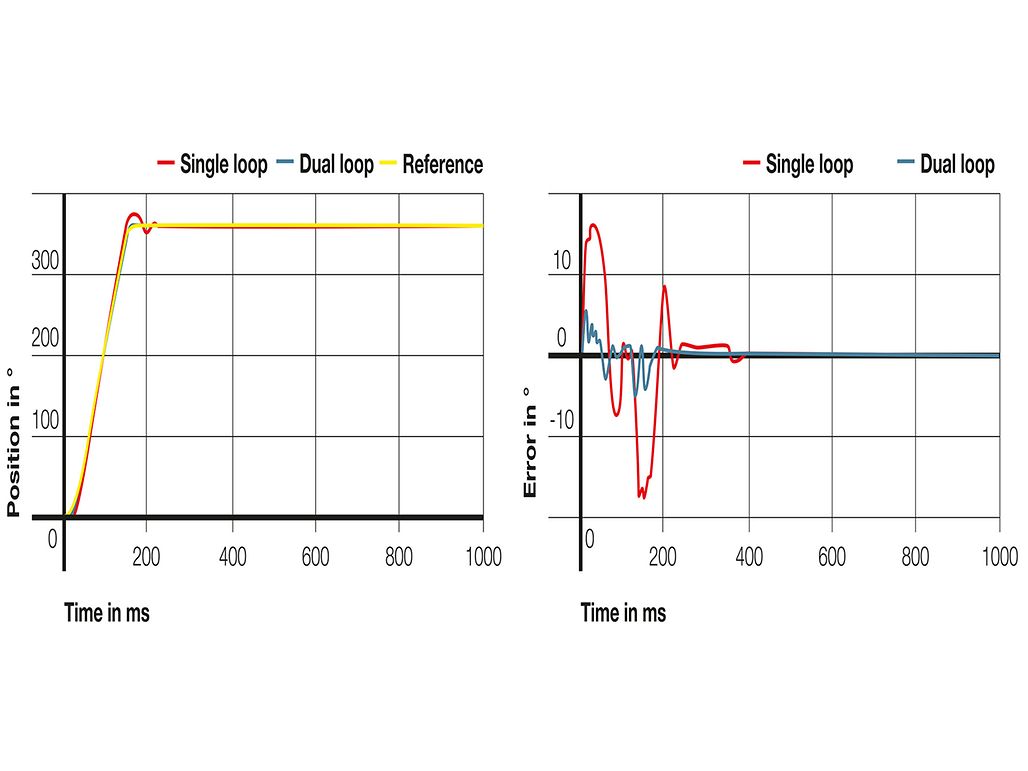
図4 ギアのバックラッシュがあるシステムの負荷位置プロファイル: 基準応答 (上) とトラッキングエラー (下)。
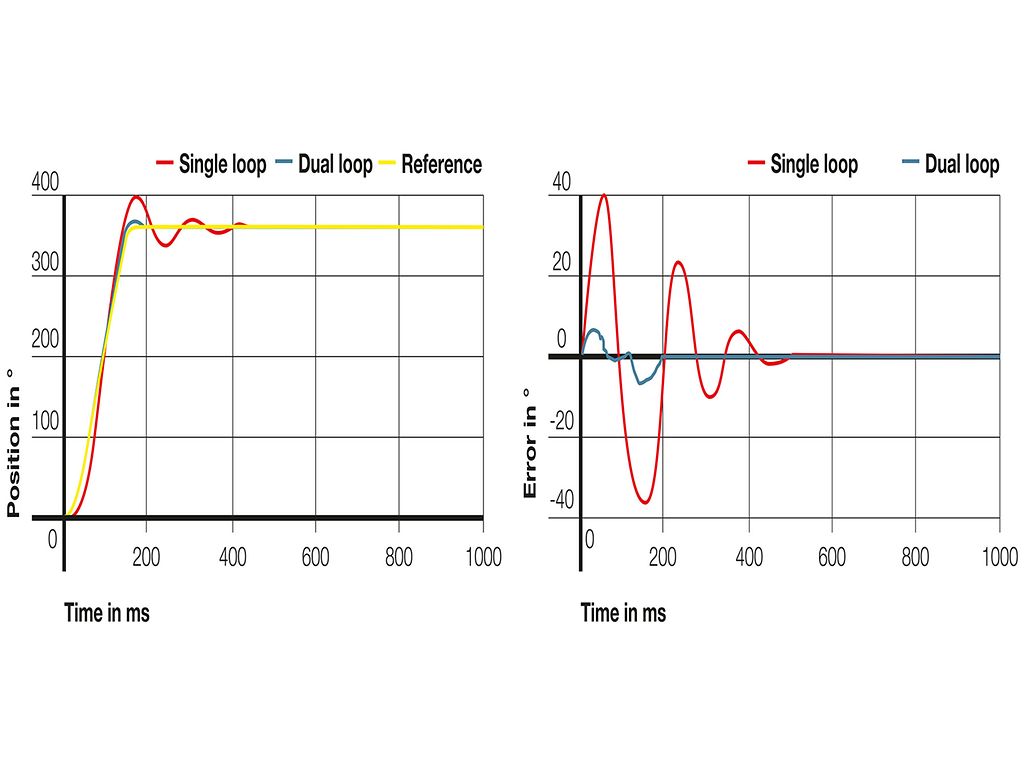
図5 弾性のあるシステムの負荷位置プロファイル。基準応答 (上) とトラッキングエラー (下)。
デュアルループ制御は、駆動システムをより正確かつ効率的なものにする手法です。maxonは、必要なすべてのコンポーネントを提供するだけでなく、最初の着想やシステム設計から本格的な商業生産に至るまで、豊富なコンサルティングサービスを提供いたしております。