maxon Story
宇宙で活躍する標準モータのカスタマイズ

標準の産業用モータと創造性あふれるコラボレーションを組み合わせることで、高度な技術的カスタマイズが実現されます。これにより、高精度で優れた耐久性を発揮するモータは、火星やさらにはその先にある未知の世界へさえも到達できるようになります。
火星の環境は非常に過酷であり、地球上での動作を想定してつくられたシステムが適応できないことは明白です。火星の大気は、雲や風を支えるのに十分な厚さがあるにもかかわらず、地球の大気の約 100 分の 1 程度と極めて希薄です。火星の表面を覆う巨大なダストデビルは、酸化した鉄粉で生成されています。このダストデビルは火星で常に見られる大気現象であり、特定の季節には何か月間も火星を覆うことがあります。火星での温度差は非常に大きく、冬の極点での温度が -125ºC (-195ºF)、昼間の赤道上の温度は 20ºC (70ºF) です。これらすべての環境にシステムを適合させるのは、非常に困難なように思えます。しかし、システム設計者は常に産業規格の設計に注目し、適切なコンポーネントを模索し始めます。
歴史の重要性
望遠鏡が発明された 1600 年代以来、火星は常に人々の好奇心を掻き立てる存在でした。望遠鏡の機能が進化し、画像のサイズがより大きくなったとしても、神秘に包まれた火星の謎が明らかにされることはありませんでした。そのため、火星への好奇心は一層高まり、赤い惑星を理解するには、最終的に、そこに行く必要があることが明らかとなりました。1964 年、NASA は初の火星フライバイに成功し、マリナー (Mariner) 4 号は、惑星表面のクレーターの写真を撮影しました。これにより科学者たちは、火星の表面は惑星というよりも月面を思い起こさせるものであることを知ります。火星表面には、歴史のある時点で起こった火山活動の兆候も見られ、巨大な峡谷が残されていました。
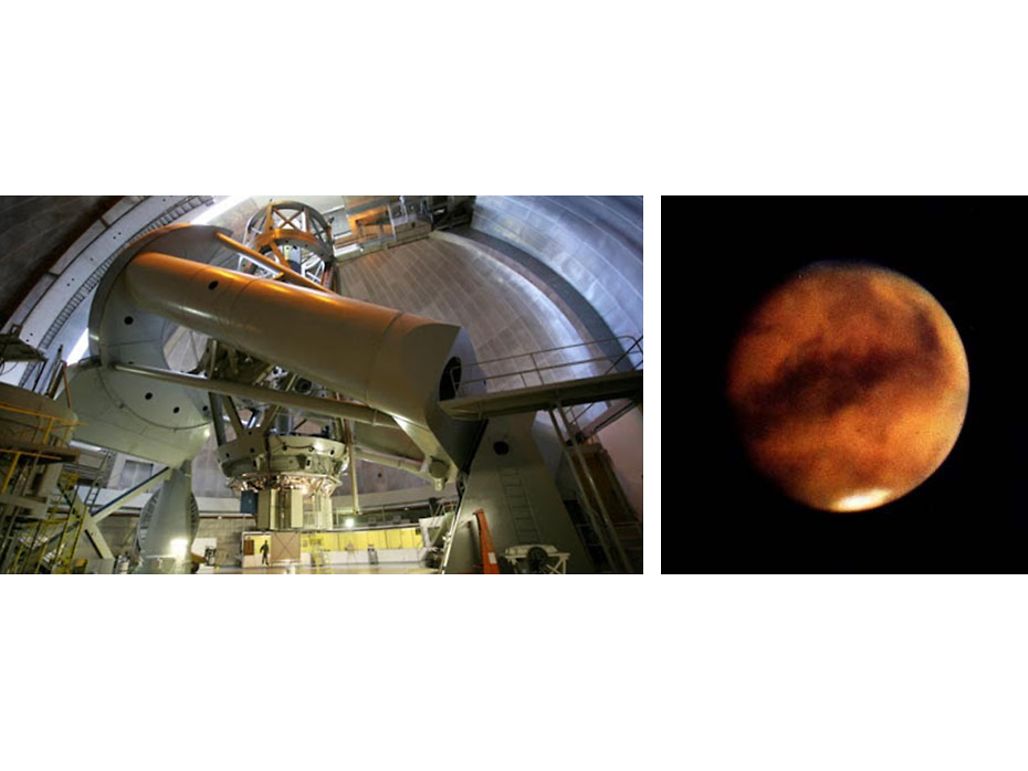
直径 4.5 メートルの鏡を有するパロマー山天文台の望遠鏡でさえ、火星の表面の詳細を見ることは困難です。(写真提供:NASA)
これらの情報は、科学者たちの火星への好奇心を一層深め、火星に着陸してその表面と環境をより詳細に調査する研究へと彼らを駆り立てました。1970 年代、NASAの ジェット推進研究所 (JPL) が送り出した探査機が、火星への着陸に初めて成功しました。火星探査機 バイキング 1号ランダー (Viking 1 Lander) は、生命の痕跡を求めて、一点表面分析を行うために使用されました。バイキング 1号 (Viking 1) は、6年以上に渡って高解像度の画像を撮影し続けました。また、ロボットアームと特別に設計された生命検知実験室を使って土壌サンプルを採取し分析したところ、この寒冷の惑星には、火山性土壌、乾燥した二酸化炭素の大気、太古の河川敷と大規模な洪水の痕跡があることが判明しました。
20年間の休止期間を経て、NASA は 1990年代半ばには、火星探査を次の段階に進める準備を整えました。この飛行を敢行するため、NASA は火星の環境にも適応できる、堅牢な標準産業用モータを探し始めました。maxon の火星のストーリーは、ここから始まります。NASA/JPL が調査を始めたとき、彼らはこのミッションにモータを適合させるには、さまざまな重要な仕様が必要であることを認識していました。たとえば最大の問題は、モータが低圧環境に耐えなければいけないこと、そして打上げだけでなくハードランディングによる振動や衝撃による負荷に耐え得る堅牢性を確保する必要があることでした。もうひとつの重大な課題は、極端な温度変化サイクルにおいてモータを正常に動作させることでした。
探査車の火星への着陸が最初に成功したのは、1997年のことでした。ソジャーナ・パスファインダー (Sojourner Pathfinder) には、セミカスタムモータに搭載されたエンジニアリング技術がどのように機能するかを確かめるための試験として、10台の RE 16 DC モータが搭載されました。maxon は高品質で長寿命の工業用モータを提供し、このミッション向けのカスタマイズはほとんど行いませんでした。その後、2004年 1月に、スピリット (Spirit) とオポチュニティ (Opportunity) という 2 台の地質探査車ロボットが火星の反対側に着陸しました。パスファインダー (Pathfinder) 探査車よりもはるかに優れた機動性を備えたこれらのロボットの主な任務は、科学的探査でした。これらの探査車ロボットには、それぞれ 35台の maxon DC モータ (RE 20 および RE 25 モータと MR エンコーダ) が搭載されていました。
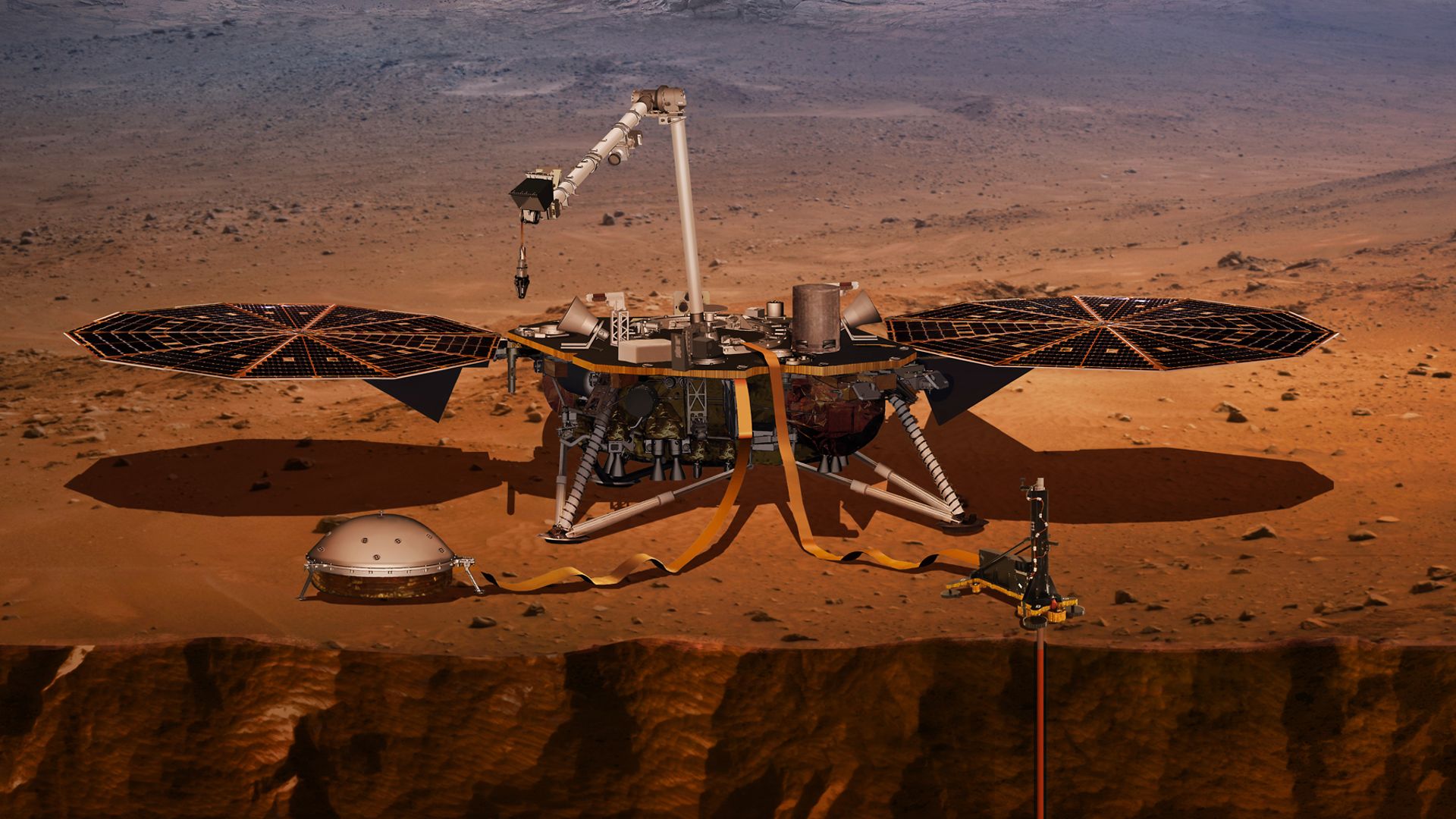
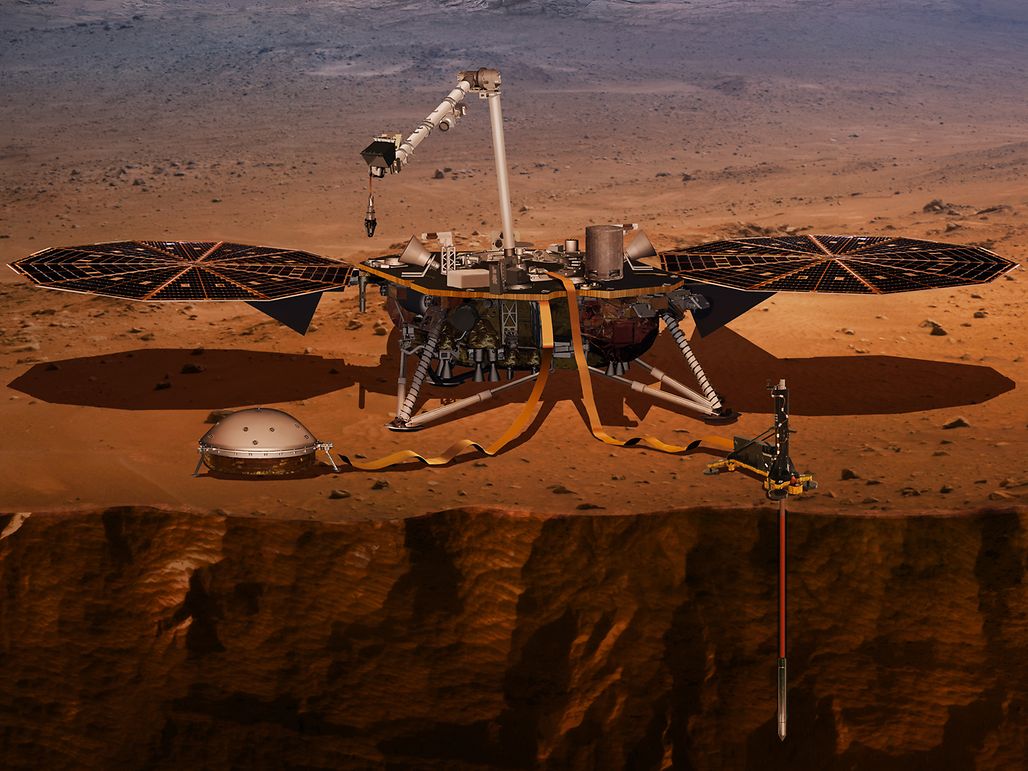
モータは、車輪の駆動、太陽光パネルの開閉、マストの展開などをはじめとする、探査車ロボットのさまざまな用途に使用されました。15年間に渡る活動と総走行距離 45 kmという功績を残し、オポチュニティは任務を終了しました。この探査車ロボットは科学的調査を実行し、惑星の歴史の中で火星の地表にかつて水が存在していたかを調査することを主な任務としていました。そして、一枚の堆積層の写真が、かつて火星には水が存在したことを証明しました。2018年 11月下旬、火星に着陸したインサイト (InSight) により、maxon の新世代ブラシ付き DCX モータ、そして maxon 初のギアボックスが、初めて火星で使用されました。
コラボレーションとテクノロジーの進化
他の産業分野のパートナーや NASA/JPL といった宇宙研究センターと協力することで、関係者全員が経験と専門知識を共有できるようになり、あらゆるレベルで技術的能力が向上しました。このコラボレーションを通じて得られた知識は、宇宙探査ミッションなど独自の用途向けのセミカスタムコンポーネントの技術進化を促進するだけでなく、メーカーがデータを使用して、標準工業製品に使用する技術をさらに進歩させることも可能にしました。火星探査車のミッションが新しく始動するたびに、より高い柔軟性とより多くの機能が要求されます。このため、コラボレーションがとても重要なのです。
最初の maxon DCX モータと遊星ギアボックスは、建設現場の杭打ち機と同様の方法で地中深くに温度センサーを埋め込むメカニズムに使用されました。(写真提供:NASA)
ミッションに参加したメンバーは、効果的なパートナーシップにより、何がうまくいき、何がうまくいかなかったか、何を変更すれば性能が向するのか、また研究を拡大する新たなチャンスはどうやって見つけるのかを学ぶことができました。たとえば、MDA 社はカスタムアクチュエータの開発を専門とする企業です。同社は、maxon のギア、ブレーキ、エンコーダを ExoMars アクチュエータに組み込みました。製造工程では、全体を通して非常に高い精度が要求されます。このため、MDA 社と maxon はパートナーシップを結び、ユニット内のすべてのボルト (4,000本) のログとトルク値を含む、特殊なアセンブリ技術を共同で開発しました。2022 年に ExoMars ミッションが始動されたあかつきには、製造された 70台のユニットのうち 12台が火星への飛行に使用されます。
新しいシステムの機能と機会の促進に役立ったもうひとつの効果的なパートナーシップは、Flight Works 社とのパートナーシップでした。Flight Works 社は、わずかに変更を加えた産業用電気モータを使用して宇宙機 (スペースクラフト) に革新的な推進力をもたらし、月、火星、およびそのもっと先への新しいミッションを可能にしました。Flight Works 社は、商用および航空宇宙産業 (UAV およびその他の宇宙推進) 市場向けの高出力密度マイクロポンプで世界をリードするメーカーです。これらのユニットは、打ち上げ時の振動や衝撃、宇宙環境に合わせて改良された maxon の産業用ブラシレスモータによって、非常に高密度を発揮する電気駆動式マイクロポンプです。同社の製品により、NASA/JPL Lunar Flashlight ミッションなど、過去 10 年間に CubeSat の打ち上げは飛躍的に増加しました。
ポンプ駆動式の推進力は、新たな宇宙事業を可能にします。Flight Works 社は、maxon EC Flat モータと EC 4 -poleモータを組み込むことで、32 mm 推進剤ポンプ、22 mm ヒドラジンポンプ、LOX/メタン極低温ポンプの設計・製造を成し遂げました。これらのマイクロポンプにより、このポンプ駆動式の推進システムは、推進、流体管理、宇宙機の冷却、軌道上での燃料補給と保守といったさまざまな操作にポンプを使用する小型宇宙船など、さまざまなミッションで運転可能となっています。もちろん、将来の火星帰還ミッションでも使用される予定です。
セミカスタム産業用モータが宇宙に進出するきっかけとなったその他の用途としては、国際宇宙ステーションに接続するドリームチェイサーなど、2 台の有人宇宙船のドッキングに使用される国際結合ドッキング機構 (IBDM) などがあります。また、民間企業も maxon のモータを自社の宇宙船に組み込んでいます。たとえば SpaceX Cargo Dragonでは、ソーラーパネルを回転させ、ナビゲーションベイのドアを開き、グラップリングフィクスチャを所定の位置にロックするのは、10 台の maxon EC 40 ブラシレス DC モータの役目です。

ExoMars ホイールドライブ用の GP 32HD ギアボックスと統合エンコーダ付き maxon DCX 22L を組み込んだボギー式電気機械アクチュエータ
今日のミッションに対応する技術
過酷な環境での動作を可能にし、より高い精度を確保するためには、設計の限界を超える必要があります。そしてそこでは、技術が重要な役割を果たします。セミカスタムおよびカスタム設計では、わずかな変更を加えるだけで、機能に多大な効果をもたらすことができます。
現在、火星に向かっている NASA/JPL ミッションを担う「マーズ 2020 (Mars 2020) 」(サンプルハンドリングおよび捕捉システム) では、キュリオシティに類似した探査車が使用されますが、これはキュリオシティよりも大きく、より堅牢な装置パッケージを備えたものとなります。この探査車のミッションは、サンプルを収集して分析し、最良のものを選択して、火星表面に配置することです。その後、別の探査車がサンプルを採取し、後に地球に持ち帰ります。maxon のブラシレスDCモータはカスタマイズされて、土壌サンプルを採取するドリルヘッドチャックなど、貴重な火星サンプルの処理に使用されています。採取されたサンプルは探査車のカルーセルに移動され、そこでサンプルが回収されます。maxon のモータは、サンプルをステーションに移動し、目視検査、シーリング、配置といったタスクを担う小さなロボットアームにも使用されています。
ミッション「マーズ 2020」には、これまでの実験的ミッションと同様、まったく新しい試みである世界初のヘリコプター、インジェニュイティ (Ingenuity) も積まれています。ヘリコプターが火星の大気圏で動作する能力を検証するための低コスト演習走行として、インジェニュイティはこれまでで最も革新的なミッションのひとつを担います。インジェニュイティ (Ingenuity) には 6 台のブラシ付きモータ (DCX 10S がスワッシュプレートのアクチュエータとしてロータブレードのピッチ角を制御します) が組み込まれており、これらがインジェニュイティ (Ingenuity) の進路を取ります。また、ヘリコプターには 2 つのロータが組み込まれていますが、各ロータには 3 つのモータ、すなわち合計 6つのモータが使用されています。モータは標準仕様の産業用モータに非常に似ていますが、飛行時の衝撃と振動、および低圧の火星大気での動作を可能にするために内部の変更が施されています。
今後何年にもわたって、太陽系の探索ミッションで、探査機、探査車、分析機器に標準仕様の産業用コンポーネントを組み込むことができることは大きなメリットです。エンジンやトランスミッションといった重要なコンポーネントにわずかな変更を加えるだけで、科学者は他の月や惑星を探索する未来に挑戦することができるのです。あらゆるミッションから学んだ教訓を生かし、業界全体に類似のコンセプトを適用してきたことは、過去数十年におけるモータ設計の多大な進歩に貢献してきました。テクノロジー・フォワードとは、設計者が「これ以上何ができるのか?」と絶えず問いかける思考プロセスです。より高レベルな能力を必要とする新たな環境に適応するとき、企業は他よりも一歩先を行く技術の開発だけではなく、標準製品も進化させることができます。
