Young Engineers Program
空飛ぶロボットのパイオニア

チューリヒ工科大学が取り組むフォーカスプロジェクトの一環として、8名の学士課程の学生たちが、任意の方向にホバリングして物体をつかむことができる飛行マニピュレーターを作成することに成功しました。このドローンはクアッドコプターよりもさらに機動性が高く、空中ロボット工学を新たな高みへと押し上げるために設計されています。
空飛ぶロボットが荷物を運ぶ倉庫。これまで、多くの発明者たちは、クアッドコプターにシリアルグリッパーアームを装備して、イントラロジスティクスで求められる未来像の現実化を試みてきました。ただし、このようなドローンとアームの組み合わせでは動作が鈍くなってしまいます。また、突き出たアームは不均衡な重量配分を招き、精度と耐荷重性にも悪影響をもたらします。さらに、クアッドコプターは水平方向にしか回転できないため、エンドエフェクタ、すなわちグリッパーをすべての方向に動かすことができません。現在ドローンの使用は、ほとんどの場合、検査タスクのみに限定されています。
昨年の秋、チューリヒ工科大学の機械工学部とプロセス工学部の学士号を取得した学生たちで構成されたチームが、これらの欠点を解消した統合型飛行ロボットの開発に乗り出しました。この若いエンジニアたちは、Autonomous Systems Lab (ASL) が募集していたフォーカスプロジェクトに取り組み、全方向飛行マニピュレーター、つまり周囲の環境と物理的に相互作用できるデバイスの構築に成功しました。

3Dプリンターからの閃 (ひらめ) き
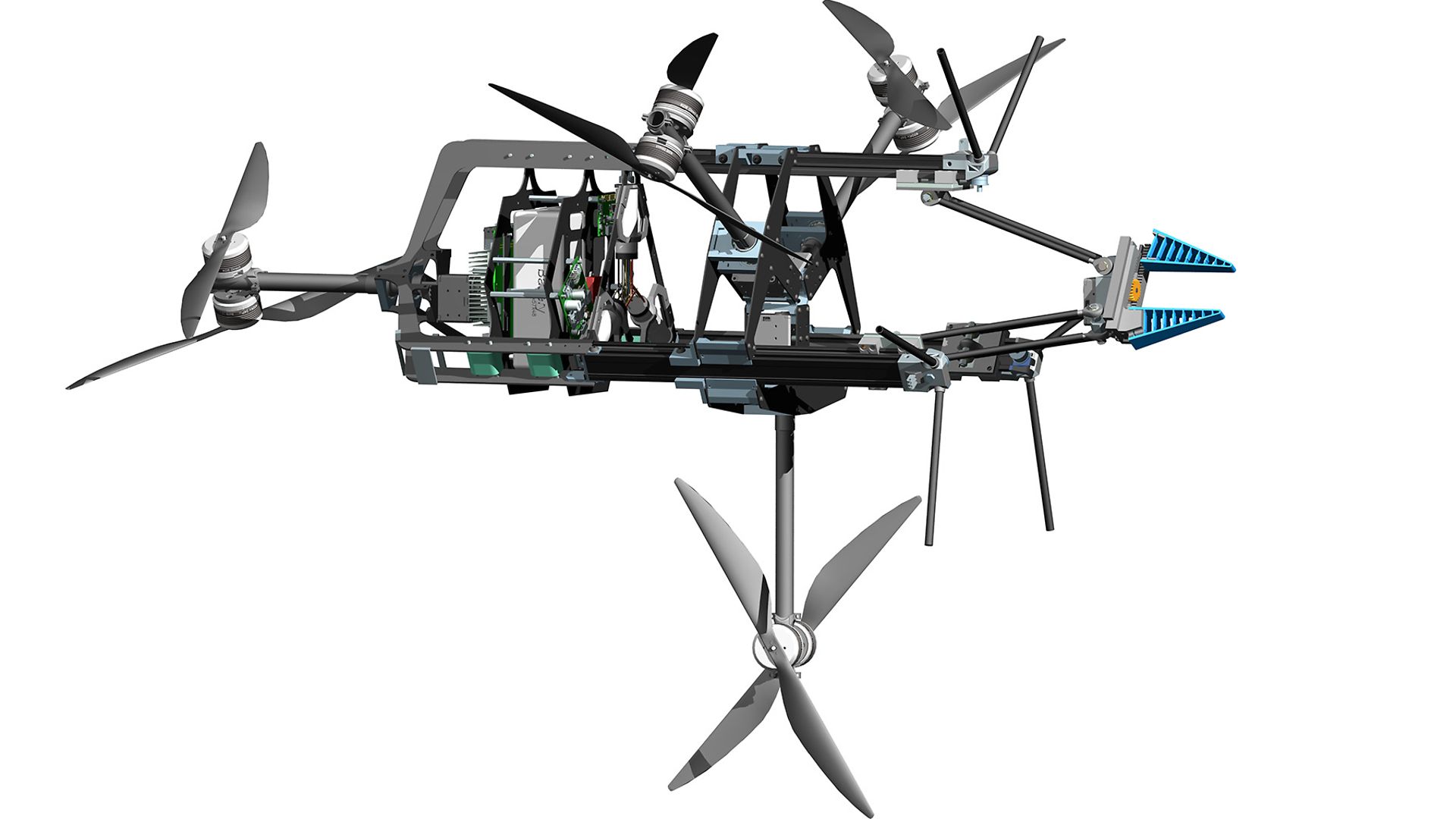
高精度のエンドエフェクタの製作にあたって、学生たちはプリズム構造内を移動する3つのスライドによって配置される、線形平行アームを取り付けました。この若いイノベーターたちは、このPrismav (Prism Micro Aerial Vehicle) に、それぞれ反対方向に回転する2つのプロペラで構成された配置の異なるドライブを4台装備しました。これにより、個々のプロペラのモーメントの均衡が実現され、安定した飛行挙動が確保されました。
このデルタアームは、3Dプリンターの内部構造からインスピレーションを得て設計されました。機械工学部の学生であるマティアス・ルビオ (Matthias Rubio) 氏は、次のように説明しています。「3Dプリンターを観察していた時、プリンターの内部構造を利用して、飛行と操作を組み合わせた飛行プラットフォームを構築できないだろうかというアイデアが私たちの頭に浮かんだんです」。このようなデルタアームが飛行マニピュレーターに使用されることはほとんどなく、まったく新しいアプローチでした。
位置決め誤差を補正する平行アーム
ローターグループは、独自の軸を中心に回転することができます。これにより、7.5 kgの飛行物体が任意の方向にホバリングすることが可能となるのです。フォーカスプロジェクトの一環として、この全方向ドローンは、ビジュアル・モーション・トラッキング・システムを装備した室内で操作され、位置とアライメントの正確な測定が行われました。これにより、Prismavには、周囲と相互作用し、グリッパーを正確に位置決めする能力が備わりました。また、容量20,000 mAhのバッテリーを2個使用することにより、約12分間の飛行が可能になりました。

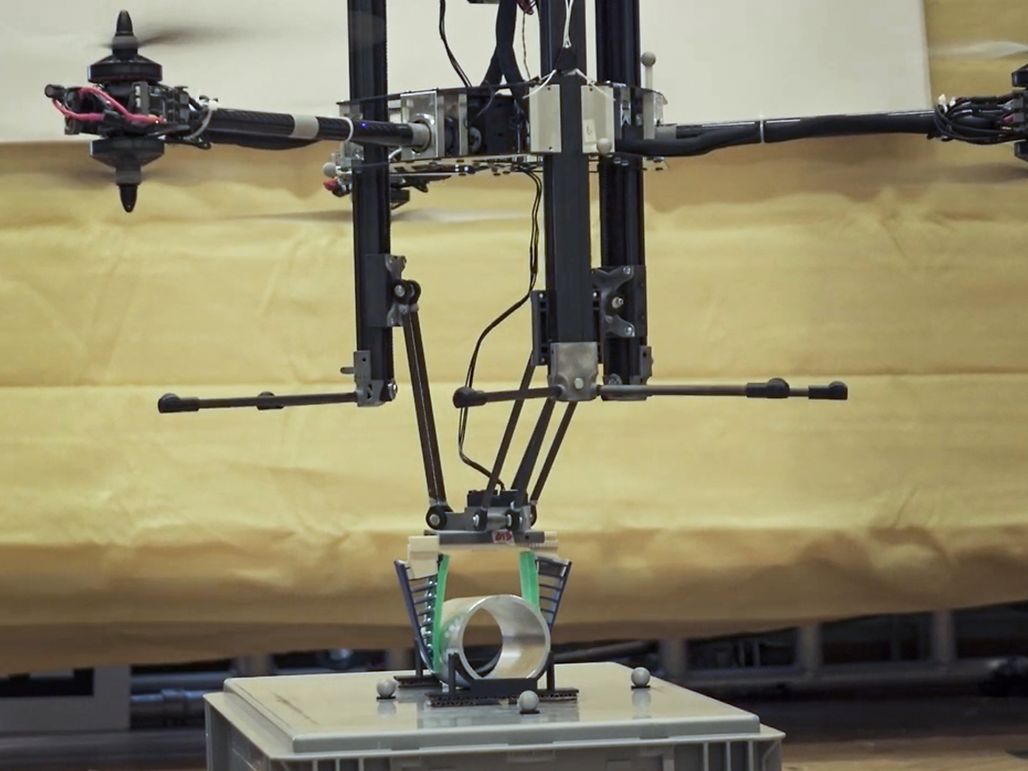
8人の学生たち (機械工学部7名、電気工学部1名) で構成されたグリフィンチームは、500グラムのシリンダーの輸送に成功した瞬間、歓声を上げました。
飛行の操作で残る精度誤差は、通常10~15 cmの範囲です。これを補正するため、maxonの3つのブラシレスモータがグリッパーアームを正確に位置決めします。リニアガイド上を移動する3つのスライドはすべて、歯付きベルトによって個別に配置されています。このシステムにより、マークされた3D空間内の任意の位置にグリッパーを到達させることができます。力を損なわずに軽量化を図るため、チームはコンパクトなECX TORQUE 22 Mドライブを選択しました。
危険な場所やアクセスが困難な場所でも
学生たちは、Prismavを通じて、さらなる研究の基盤を確立しました。マティアス・ルビオ氏は、次のように付け加えます。「飛行マニピュレーターは、環境との物理的な相互作用を実行することで、500 gのシリンダーをつかみ、運び、下ろすことができることを実証しました」。ここで重要なのは、ドローンが移動するよりも高速な動作で、グリッパーアームが位置決めエラーを補正することです。
2021年に発表されたフォーカスプロジェクトは、大きな反響を呼びました。そのため、学生たちは学士課程プロジェクトの一環として、 Prismavの開発を続けています。彼らは、自動測位、飛行経路計算、および制御ソフトウェアを最適化し、直感的なコントローラの統合に取り組んでいます。膨大な潜在的可能性を秘めたこのアプリケーションへの取り組みは、今後さらに重要になることでしょう。たとえば、将来この飛行ロボットは、アクセスが困難な場所や危険な場所で、ネジの締め付け、足場の設置、高圧線の修理、さらには雪崩保護構造の構築などといった作業を行えるようになる可能性も秘めているのです。