Young Engineers Program
Wendbare collaboratieve robot

Canadese onderzoekers aan de Université Laval ontwikkelen een nieuw soort collaboratieve robot die de wendbaarheid van het menselijk lichaam evenaart.
Collaboratieve robots (cobots) zijn robotarmen die rechtstreeks door mensen kunnen worden gemanipuleerd om taken te leren zonder dat complexe programmeerinterfaces nodig zijn. Commercieel verkrijgbare cobots zijn gebaseerd op een seriële architectuur. Ze hebben actuatoren met een grote overbrengingsverhouding, waardoor ze niet mechanisch kunnen worden terugbewogen. Kracht-/koppelsensoren leveren de reacties op de krachten die door mensen op de robot worden uitgeoefend. Hierdoor kunnen dergelijke robots de menselijke wendbaarheid niet evenaren, wat hun gebruik nogal onnatuurlijk maakt in door mensen geleide taken.
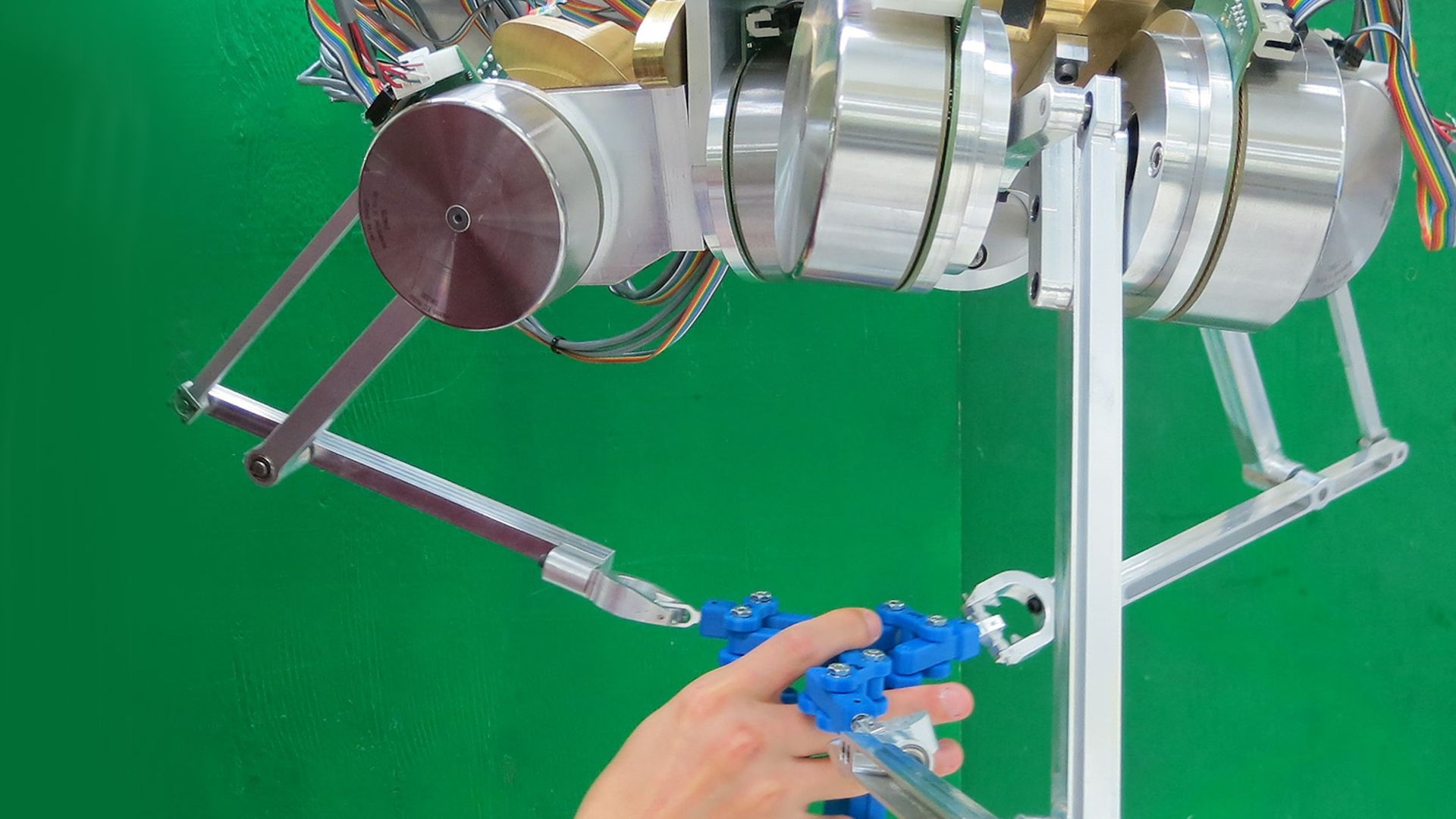
Onderzoekers aan de Université Laval hebben gekozen voor een andere aanpak. Ze stellen een collaboratieve robot voor op basis van een parallelle architectuur die de dynamische massatraagheid aanzienlijk vermindert en plaatsing van de actuatoren op of dicht bij de basis mogelijk maakt. In dat geval kunnen direct aangedreven actuatoren worden gebruikt, waardoor de robot mechanisch kan worden terugbewogen en kracht-/koppelsensoren niet meer nodig zijn. Om bij afwezigheid van overbrengingen voldoende koppel te kunnen leveren, worden EC 90 flat motoren met een hoog koppel gebruikt. In de poten van de robot bevinden zich contragewichten om de statische koppels bij de actuatoren te reduceren. De mechanische terugbeweging van de robot zorgt voor een moeiteloze en intuïtieve fysische interactie tussen mens en robot. Bovendien kan een uiterst eenvoudige en effectieve regelaar worden gebruikt. Bijkomend voordeel van de architectuur van de robot is dat de een grijper vanaf de basisactuatoren kan worden bediend. Dankzij de terugbeweging, de lage massatraagheid en de direct aangedreven transmissie kan de robot de wendbaarheid van de menselijke arm benaderen. Hij is daarom uitermate geschikt voor moeiteloze, intuïtieve en behendige fysieke interacties tussen mens en robot met een hoge bandbreedte, zoals in de bijbehorende video's is te zien.