maxon Story
Wanneer kiest u een 4-polige DC-motor?


Een 4-polige kleine gelijkstroommotor biedt absoluut voordelen in uiteenlopende toepassingen, variërend van luchtvaart tot boorinspectie. Een 4-polig model is sterker dan een 2-polig equivalent, maar past in hetzelfde ruimte- en gewichtsbereik. Greg Dutfield van maxon UK geeft een toelichting.
Voor DC-motortoepassingen die een hoog koppel, een licht gewicht en compacte ruimte vereisen, kunnen 4-polige motoren optimaal zijn. Een 4-polige motor past in dezelfde ruimte als een 2-polig ontwerp, maar kan meer koppel genereren. Belangrijk is ook dat een 4-polige motor sterker is dan een 2-polige motor van gelijke grootte, hetgeen betekent dat hij zijn toerental beter behoudt wanneer er een belasting op wordt uitgeoefend.
Uitleg bij het aantal polen – toerental
Het aantal polen verwijst naar het aantal permanente magneetparen in een motor. 2-polige motoren hebben één paar magneten in tegenovergestelde noord- en zuidpositie. Wanneer er stroom op staat, ontstaat er tussen het magneetpaar een magnetisch veld waardoor de rotor gaat draaien. Motorconfiguraties kunnen ook over 4-polige motoren beschikken, met twee poolparen magneten, of meerpolige ontwerpen met maximaal 12 polen.
Het aantal polen is een belangrijke factor omdat het van invloed is op het toerental en het koppel van de motor. Hoe lager het aantal polen, hoe hoger het toerental van de motor. Dit komt doordat elke mechanische omwenteling van de rotor afhangt van de voltooiing van de magneetveldcyclus van elk poolpaar. Hoe meer permanente magneetparen een motor heeft, hoe meer magneetveldcycli nodig zijn, wat betekent dat de rotor langer over een omwenteling van 360° doet. Het toerental wordt gedeeld door het aantal poolparen bij een vaste frequentie. Dus uitgaande van een 2-polige motor van 10.000 rpm, zou een 4-polige motor 5.000 rpm genereren, een 6-polige motor zou met 3.300 rpm draaien enzovoort.
Uitleg bij het aantal polen – koppel
Ongeacht het aantal polen kan een grotere motor meer koppel genereren. Maar als je motoren van hetzelfde volume met elkaar vergelijkt, is een groter aantal polen in staat om meer koppel te genereren. Bij een 4-polige motor wordt het koppel sterk verhoogd omdat het compacte ontwerp een dunnere magnetische retourweg heeft, waardoor er meer ruimte is voor twee permanente magneetparen en, in het geval van maxon motoren, een gepatenteerde dikkere wikkeling (‘knitted winding’).
Hoewel een 4-polige motor in dezelfde ruimte past als een 2-polig ontwerp, moeten we u erop wijzen dat een verdere uitbreiding van het aantal polen, van 6 tot 12, betekent dat de frameafmetingen en de massa overeenkomstig moeten toenemen om het extra koper, ijzer en de benodigde magneten te kunnen herbergen.
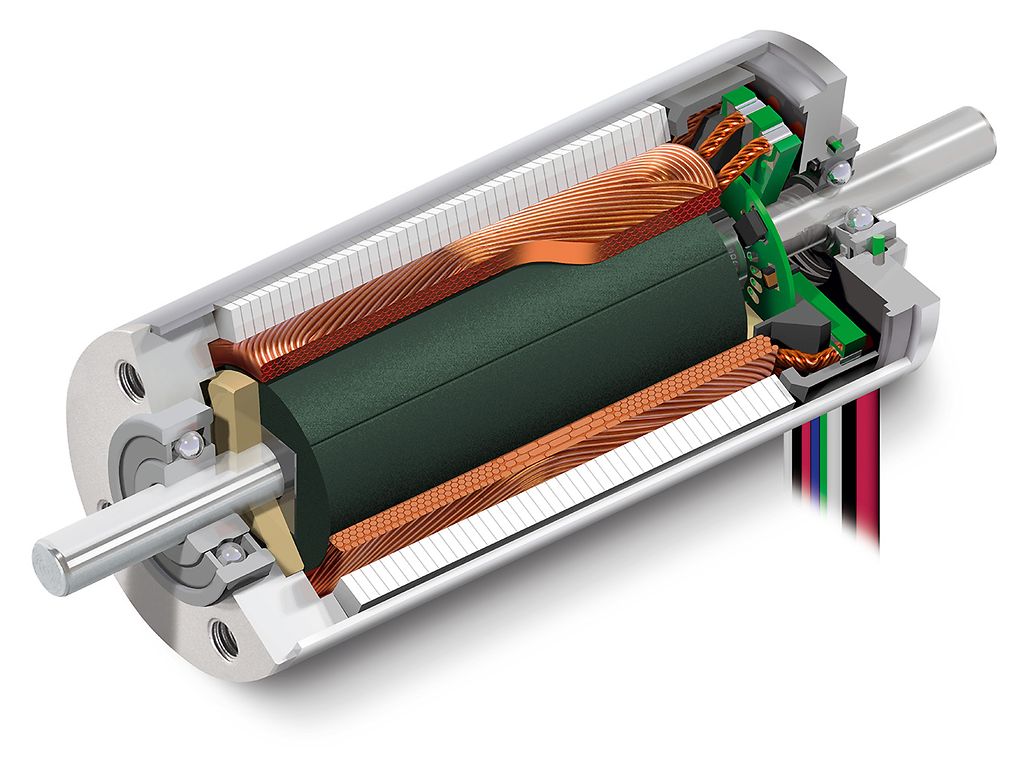
4-polige EC-motoren van maxon behouden hun toerental bij hoge belastingen.
4-polige motoren zijn sterker
De sterkte van een motor wordt normaal gesproken bepaald door zijn toerental-koppelgradiënt. Dit betekent dat een sterkere motor zijn toerental beter kan vasthouden wanneer een belasting wordt toegepast. Het toerental-koppelgradiënt wordt gemeten op grond van de toerentalafname voor elke 1mNm belasting. Een lagere waarde en een kleinere gradiënt betekenen dat een motor zijn toerental onder belasting beter kan vasthouden.
Een sterkere motor wordt aldus verkregen door toepassing van dezelfde kenmerken die ook in een hoger koppel resulteren, zoals grotere wikkelingen en het gebruik van optimale materialen. Daarom is een 4-polige motor sterker dan een 2-polige motor met dezelfde framemaat.
Een maxon 4-polige motor 22 mm heeft bijvoorbeeld een toerental-koppelgradiënt van 19,4 rpm/mNm, wat betekent dat voor elke 1mNm die wordt toegepast, hij slechts 19,4 rpm verliest, terwijl de 2-polige maxon motor met dezelfde framemaat een toerental-koppelgradiënt heeft van 110 rpm/mNm. Niet alle motorfabrikanten werken met dezelfde ontwerp- en materiaalspecificaties als maxon, dus de toerental-koppelgradiënt van een 2-polige motor van een ander merk kan hoger zijn, waardoor de motor zwakker is.
Wanneer zou u voor een 4-polige motor moeten kiezen?
Toepassingen in de luchtvaartindustrie profiteren van de grotere kracht van een 4-polige motor in combinatie met een laag gewicht. Deze eigenschappen komen ook van pas in handgereedschap dat vaak meer koppel nodig heeft dan een 2-polige motor kan leveren, maar toch een laag gewicht en kleine afmetingen bezit.
De eigenschappen van 4-polige motoren zijn eveneens belangrijk voor fabrikanten van mobiele robots. Of het nu gaat om het inspecteren van olie- en gaspijpleidingen of het zoeken naar aardbevingsslachtoffers, robots op wielen of rupsbanden moeten over ruw terrein, obstakels en steile hellingen rijden. 4-polige motoren leveren het koppel en de kracht die nodig zijn om deze belastingen aan te kunnen. Tegelijkertijd kunnen de fabrikanten van mobiele robots dankzij deze motoren een compact, lichtgewicht model realiseren.
Kleine afmetingen in combinatie met een laag toerental-koppelgradiënt: deze factor is ook van cruciaal belang voor boorinspecties in de olie- en gassector. Voor deze toepassing zou een compacte 2-polige motor niet sterk genoeg zijn, terwijl een meerpolige motor te groot zou zijn om in de ruimte van de boorinspectie te passen, dus ontwierp maxon speciaal hiervoor een 4-polige motor 32mm.

Een 4-polige motor optimaliseren
Veel toepassingen waarvoor een 4-polige motor geschikt is, vinden plaats in extreme omgevingen of onder extreme omstandigheden. De motoren moeten onder hoge temperatuur kunnen werken en druk en trillingen aankunnen. Zo moeten motoren bij boorinspecties bijvoorbeeld temperaturen van meer dan 200 °C weerstaan, terwijl motoren in autonome onderwatervoertuigen (AUV’s) in met olie gevulde behuizingen worden gemonteerd die tegen uiterst hoge druk op dieptes tot 6000 m bestand moeten zijn. Door verdere factoren bij het ontwerp te specificeren, zoals hulzen en technieken om de warmteafvoer te verbeteren, kan ervoor gezorgd worden dat compacte 4-polige motoren langdurig tegen extreme bedrijfsomstandigheden bestand worden.
Hoewel de motorspecificatie fundamenteel is, moet voor een optimale toepassing het ontwerp van het complete aandrijfsysteem worden bekeken, inclusief overbrengingen, encoders, aandrijvingen en besturingen. Naast advies over de motorspecificatie bieden de ingenieurs van maxon een samenwerking met OEM-ontwerpteams aan. Op deze wijze kan een compleet aandrijfsysteem worden ontwikkeld, specifiek gericht op uw toepassingsvereisten.



EC 4pole 22 + GP24
Wilt u uw toepassingsvereisten bespreken, neem dan contact op met Dutfield, Industrial & E-Mobility Sales Engineer, maxon UK, 01189 733337 of greg.dutfield@maxongroup.com