Young Engineers Program
Vrij baan voor vliegende robots

In het kader van een focusproject ontwikkelden acht bachelorstudenten van de ETH Zürich een drone met grijpklauw die in elke richting kan vliegen en voorwerpen kan vastpakken. Deze drone is nog wendbaarder dan een quadrocopter en bedoeld om luchtrobotica naar nieuwe hoogten te tillen.
Een magazijn met vliegende robots die pakketten verplaatsen. Veel uitvinders hebben al geprobeerd om deze toekomstvisie voor de intralogistiek werkelijkheid te laten worden door quadrocopters met seriële grijparmen uit te rusten. Dergelijke drones met grijparm zijn echter traag en omdat de arm uitsteekt, is de gewichtsverdeling ongunstig en wordt het draagvermogen negatief beïnvloed. Bovendien kunnen quadrocopters alleen in het horizontale vlak roteren. Dit betekent dat de zogenaamde ‘eindeffector’ (in dit geval de grijper) niet in alle richtingen kan bewegen. De meeste drones worden momenteel alleen voor inspectiedoeleinden gebruikt.
Afgelopen najaar kreeg een team van bachelorstudenten werktuigbouwkunde en procestechniek aan de ETH Zürich een idee voor een geïntegreerde vliegende robot die geen last heeft van deze tekortkomingen. De ingenieurs gingen aan de slag met het focusproject dat door Autonomous Systems Lab (ASL) was aanbesteed en bouwden een omnidirectionele drone met grijpklauw: een apparaat dat in staat is tot fysieke interactie met zijn omgeving.

Geïnspireerd door een 3D-printer
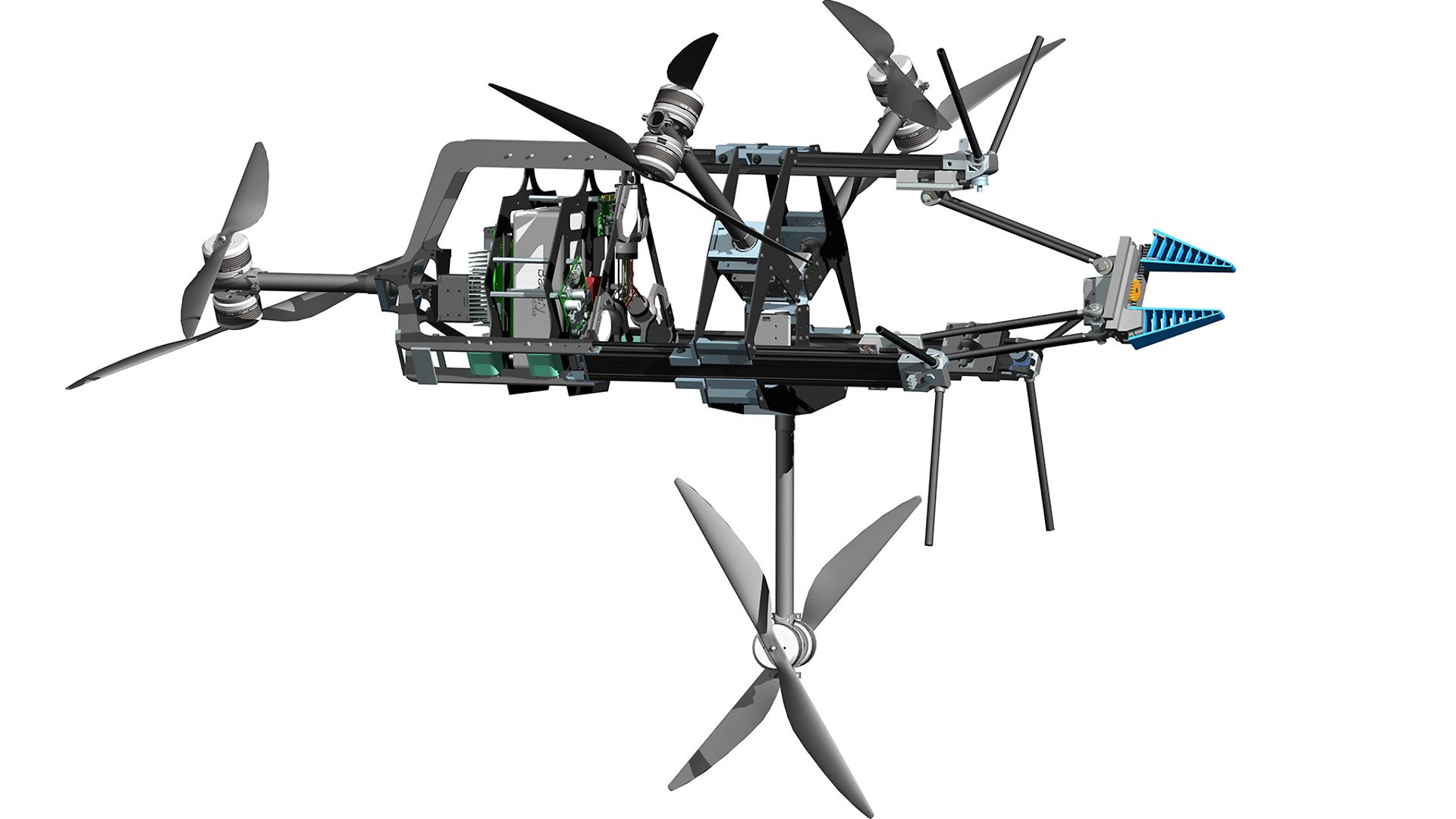
Om een uiterst nauwkeurige eindeffector te maken, plaatsten de studenten een lineaire parallelle arm die wordt gepositioneerd door middel van drie sledes die binnen een prismatische structuur bewegen. Het jonge team heeft de Prismav (Prism Micro Aerial Vehicle) uitgerust met vier aandrijvingen die verschillend zijn uitgelijnd. Elke aandrijving bestaat uit twee propellers die in tegengestelde richting draaien. Dit brengt het moment van de propellers in balans en zorgt voor een stabiel vlieggedrag.
Het interieur van een 3D-printer vormde de inspiratiebron voor de delta-arm. Matthias Rubio, student werktuigbouwkunde, legt uit: “We stonden voor de 3D-printer en kregen het idee om de inwendige structuur van de printer te gebruiken voor de bouw van een platform dan kon vliegen en objecten kon vastgrijpen.” Dit is een nieuwe benadering, aangezien dergelijke delta-armen vrijwel nooit voor drones met een grijpklauw worden gebruikt.
Parallelle arm compenseert positioneringsfouten
De rotorunits kunnen rond hun eigen as draaien. Hierdoor kan de 7,5 kg zware drone in elke richting vliegen. Tijdens het focusproject werd de omnidirectionele drone bediend in een ruimte die met een visueel motion tracking systeem is uitgerust, waardoor een nauwkeurige meting van de positie en uitlijning mogelijk was. Hierdoor is Prismav in staat om met zijn omgeving te interageren en de grijper precies te positioneren. Twee accu’s met een capaciteit van 20.000 mAh zorgen voor een vliegtijd van ongeveer 12 minuten.

Acht blije studenten (zeven studenten werktuigbouwkunde en één student elektrotechniek) van het Griffin-team na een geslaagde vlucht met een cilinder van 500 g.
De resterende onnauwkeurigheid in de vluchtmanoeuvres ligt meestal tussen de 10 en 15 centimeter. Om dit te compenseren, zorgen drie borstelloze motoren van maxon voor een nauwkeurige positionering van de grijparm. De drie sledes, die op lineaire geleidingen bewegen, worden individueel door middel van een tandriem gepositioneerd. Met dit systeem kan de grijper elke positie binnen de gemarkeerde 3D-ruimte bereiken. Om gewicht te besparen zonder aan kracht in te boeten, koos het team voor de compacte aandrijvingen ECX TORQUE 22 M.
Voor gevaarlijke of ontoegankelijke gebieden
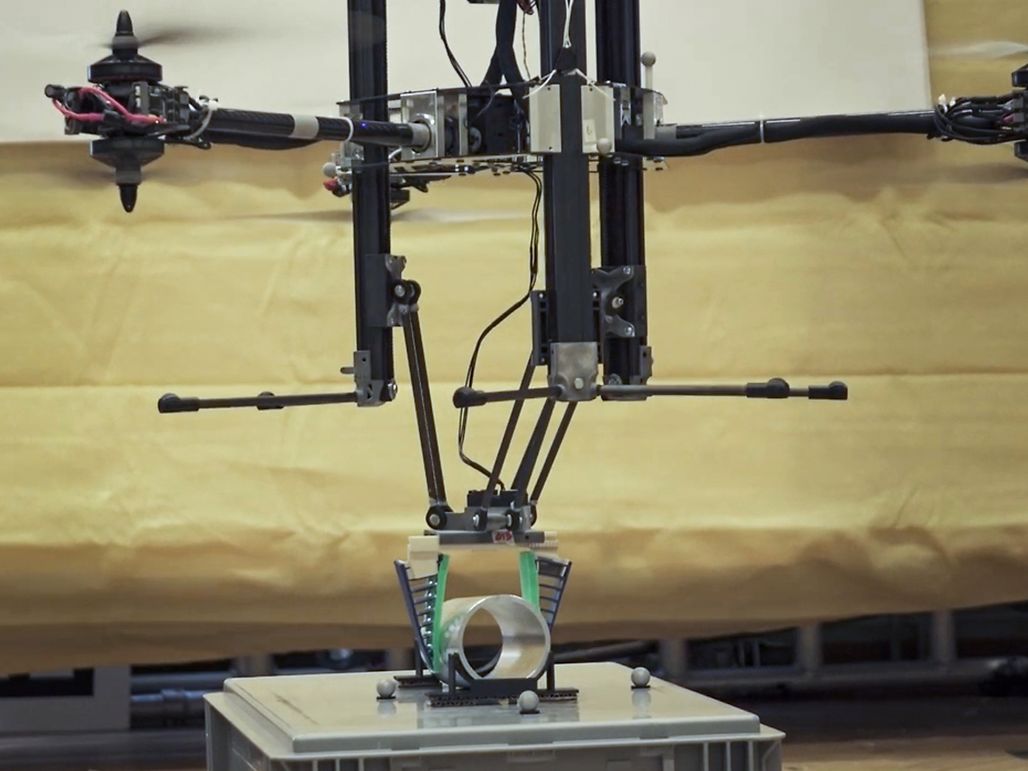
Met Prismav legden de studenten de basis voor verder onderzoek. Matthias Rubio licht dit toe: “We hebben aangetoond dat een drone met zijn grijpklauw een cilinder van 500 g kan vastpakken, transporteren en neerleggen door interactie met zijn omgeving.” Essentieel is dat de grijparm positioneringsfouten sneller compenseert dan de drone beweegt.
Het focusproject, dat in 2021 werd gepresenteerd, kreeg veel respons. Als onderdeel van hun bachelor werken de studenten daarom verder aan de Prismav door de geautomatiseerde positionering, vliegrouteberekening en besturingssoftware te verbeteren en een intuïtieve controller te integreren. Een logisch besluit, want het potentiële toepassingsgebied is enorm. Zo kunnen vliegende robots in de toekomst werkzaamheden verrichten op onbereikbare of gevaarlijke locaties en hier schroeven aandraaien, steigers plaatsen, hoogspanningslijnen repareren en zelfs lawinebeveiligingsconstructies bouwen.
Image Copyrights
Focusproject Griffin