maxon Story
Kenshiro: sterke robot met 160 spieren.

Na jarenlang onderzoek is het zover: de universiteit van Tokio heeft een humanoïde robot ont¬wik¬keld die aangedreven wordt door 160 katrol-achtige “spieren”. Bijna 100 borstelloze maxon-motoren zorgen in de slechts 1,58 meter grote robot voor mensachtige bewegingen.
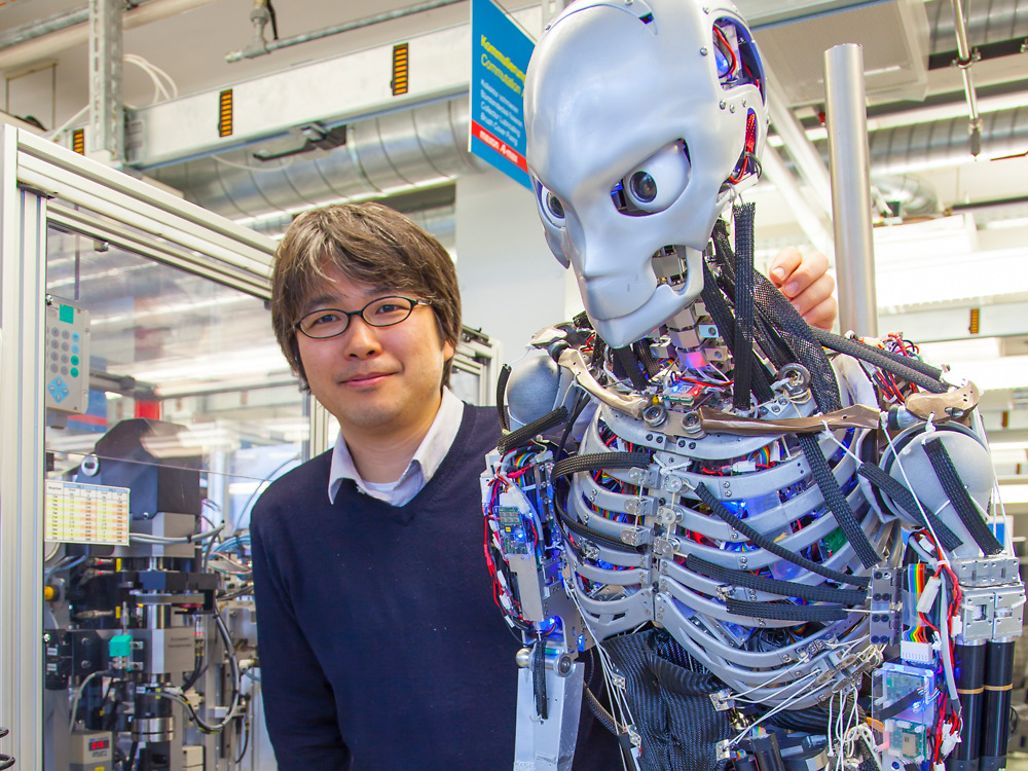


Professor Kei Okada met Kenshiro bij maxon motor ag in Zwitserland. © 2013 maxon motor
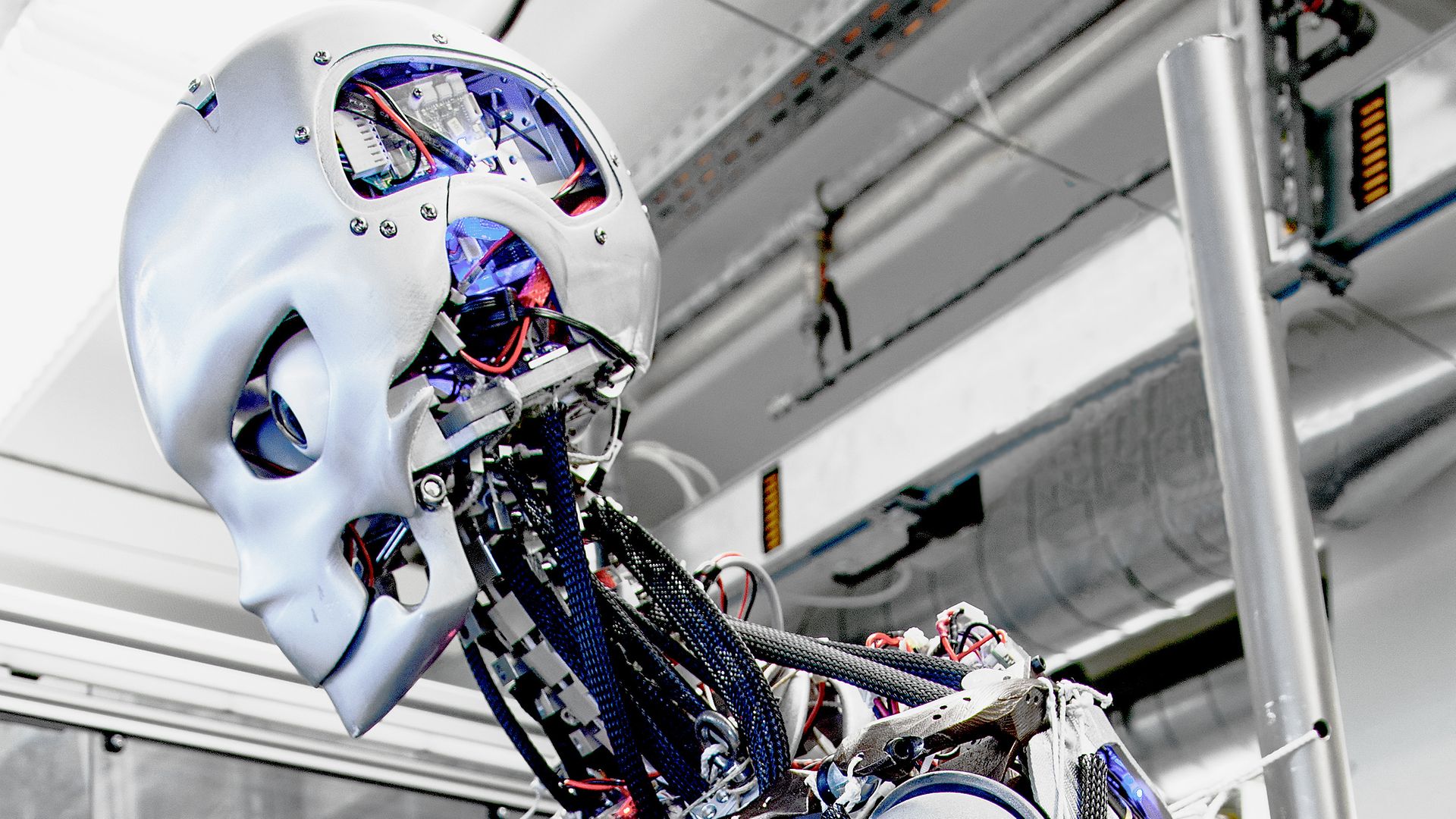
Aangestuurd door katrol-achtige ”spieren” beweegt de humanoïde robot, ontwikkeld door de universiteit van Tokio, zich op een wijze die heel dicht in de buurt komt bij menselijke bewegingen. De robot heet Kenshiro en is vernoemd naar een Japanse held uit een populaire manga uit de jaren 80. De Japanse wetenschappers hebben de robot gemodelleerd naar de menselijke anatomie. Dus hoewel het bij Kenshiro om een kunstmatige mens gaat, hebben de wetenschappers hun best gedaan hem een zo natuurlijk mogelijke fysionomie te geven. “Ons doel was om een begrip te krijgen van de menselijke bewegingen en het menselijke uiterlijk en deze kennis zo precies mogelijk in Kenshiro te verwerken”, licht professor Kei Okada toe. Het lichaam van de robot is gemodelleerd naar een twaalfjarige Japanse jongen, met een lengte van 1,58 m en een gewicht van 50 kilo.
Kenshiro bootst bijna alle grote spiergroepen van een mens na: 50 spieren zitten in zijn benen, 76 in de romp, 12 in de schouders en 22 in zijn nek. Het is het grootste aantal spieren dat ooit in een humanoïde robot gebouwd werd. Ter vergelijking: de menselijke anatomie is veel complexer, met 640 spieren. Hoewel Kenshiro's 160 apart gestuurde katrol-achtige “spieren” hem in staat stellen vele menselijke bewegingen te imiteren, kan hij nog lang niet alle bewegingen nabootsen. Het biologische bewegings¬patroon van een mens is nu eenmaal uiterst complex. Kenshiro kan armen, benen en bovenlichaam bewegen. Maar echt lopen moet hij nog leren. Hoe leert de robot deze mensachtige bewegingen eigenlijk? Heel eenvoudig: je doet hem een beweging voor en hij bootst de beweging na.
Een simpele leermethode die met behulp van een Open Source Intelligent Software en een mechanische interface omgezet wordt. Bij het leren lopen hoort natuurlijk nog meer.
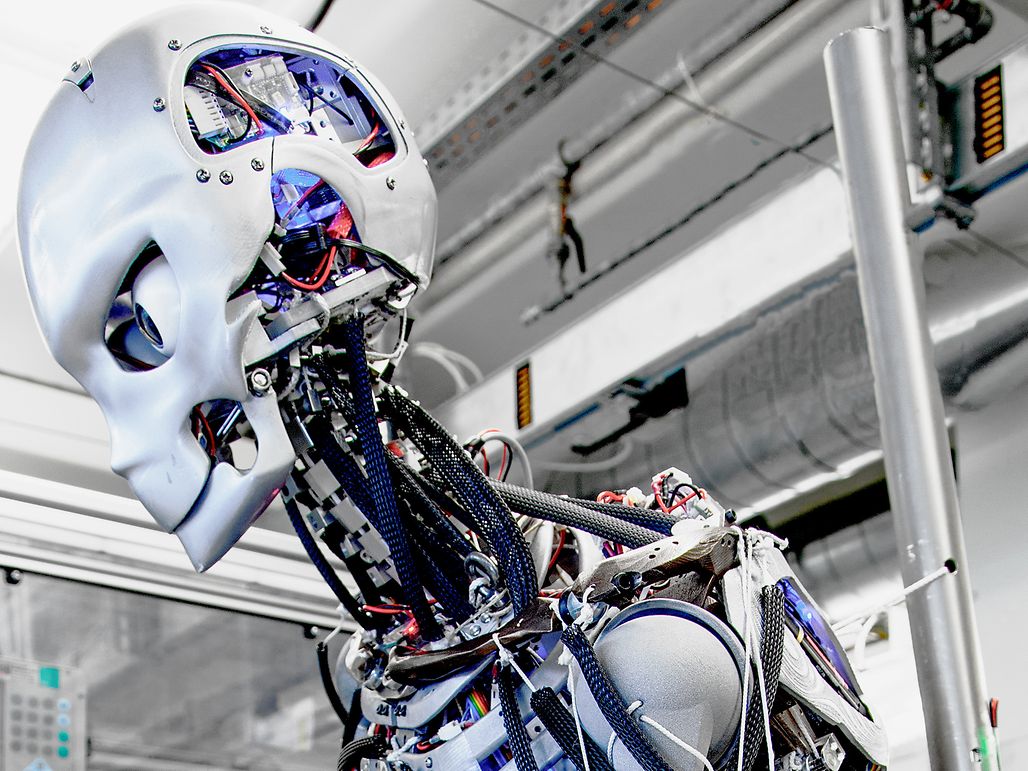
De “botten” van Kenshiro zijn van aluminium en net als bij mensen op beweeglijke wijze met elkaar verbonden. Voor professor Masayuki Inaba, die het team van wetenschappers leidde, was het gewicht van Kenshiro de allergrootste uit¬daging. Want een volwassen versie van de robot zou, als Kenshiro op dezelfde manier als zijn voorgangers gebouwd was, 100 kilo wegen. Het dubbele dus van wat Kenshiro weegt. Dit had een grotere belasting, een hoger energie¬vereiste en langzamere bewegingen tot gevolg gehad.
93 motoren voor 160 spieren
De onderzoekers van het Jouhou System Kougaku Labora¬tory (JSK) van de universiteit van Tokio hebben gekozen voor een aandrijfsysteem van maxon motor, om de robot aan te drijven. 93 maxon EC-motoren (BLDC) zorgen voor de contractie van de 160 spieren van Kenshiro. Waarbij voor het contraheren van speciale spieren, waaronder de buik- en borstspieren, maar één motor voor de aandrijving zorgt. Hiervoor worden de borstelloze maxon motoren EC 16 en EC 22 gebruikt. De elektronisch gecommuteerde servo¬mo¬toren blinken vooral uit door een gunstig koppel, een hoge dynamiek, een buitengewoon ruim toerentalbereik en door hun lange levensduur. Voor de contractie van de spieren zijn sterke BLDC-motoren nodig. Daarom beschikken de gebruikte maxon-motoren over 60 tot 100 W vermogen. Een ander belangrijk criterium bij de motorkeuze was de temperatuurontwikkeling van de motor. Omdat een koeling in de robot niet mogelijk is, is het volgens professor Kei Okada buitengewoon belangrijk dat de motoren zelf zeer weinig warmte ontwikkelen.
De JSK bouwt al robots sinds 1980 – het eerst kwamen de verschillende servicerobots, toen de industrierobots en tenslotte de mensachtige robots, zoals Kenshiro. Net als zijn voorgangers Kenta, Kotaro, Kojiro, Kenzoh moet hij het menselijke lichaam zo exact mogelijk nabootsen. Hiervoor is ook een menselijk uiterlijk nodig. Daarom ontwikkelen de Japanse wetenschappers momenteel een huid voor een robot. In de nabije toekomst zal de actieve wisselwerking tussen Kenshiro en zijn omgeving nog worden versterkt. Volgend doel van de wetenschappers is om Kenshiro langer en stabiel te laten lopen.