Young Engineers Program
Een trapje hoger

Voor veel robots zijn trappen nog steeds onoverkomelijke obstakels. Toch bouwt een jong team aan de ETH Zürich een voertuig dat gemakkelijk trappen kan nemen, en wel door te springen.
“Ascento” is de naam die de makers, een team van acht studenten werktuigbouwkunde en één student elektrotechniek, aan het geavanceerde apparaat hebben gegeven. De robot is heel bijzonder: hij beweegt en balanceert op twee wielen. Vanuit technisch oogpunt is dit aanzienlijk moeilijker dan het bouwen van een apparaat op vier wielen. Een tweevoetige robot beschikt echter over een veel betere mobiliteit en over een beter aanpassingsvermogen aan verschillende terreinsoorten.
Dat is nog niet alles: het hoofddoel van de negen aankomende ingenieurs is de robot te laten springen. Ze willen dat hij als een kangoeroe omhoog kan springen en weer veilig op beide wielen kan landen. “Zo zou de robot trappen en andere obstakels kunnen passeren,” legt student Florian Weber uit. Het Ascento-team is uit een focusproject ontstaan. Bij dergelijke projecten krijgen studenten van verschillende studierichtingen de kans om hun kennis aan de hand van een concreet project toe te passen – van eerste idee tot een functionerend prototype.
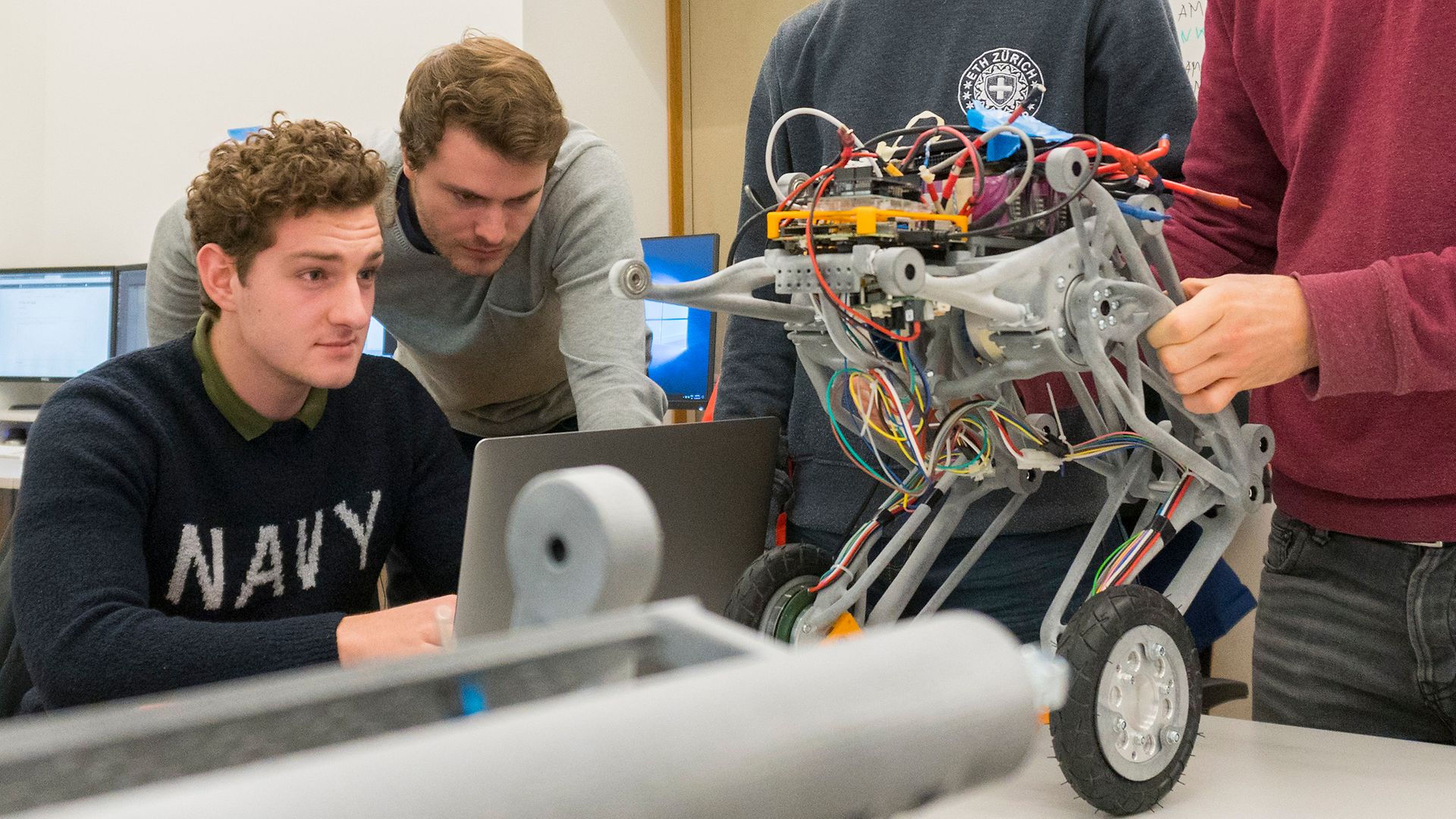
Van links: Ciro Salzmann, Marcus Vierneisel, Lionel Gulich, Florian Weber
Het bijzondere van de Ascento is dat hij is ontworpen als een omgekeerde slinger: Het zwaartepunt ligt boven de as. Daardoor kan de Ascento alleen staan en bewegen zolang hij wordt aangedreven en actief op zijn wielen balanceert – vergelijkbaar met een staande mens, die voortdurend energie moet verbruiken om in evenwicht te blijven. Dit maakt de Ascento vergelijkbaar met een Segway, die ook wordt aangedreven door twee wielen die met dezelfde as verbonden zijn en een gecontroleerde aandrijving nodig heeft om het evenwicht te bewaren.
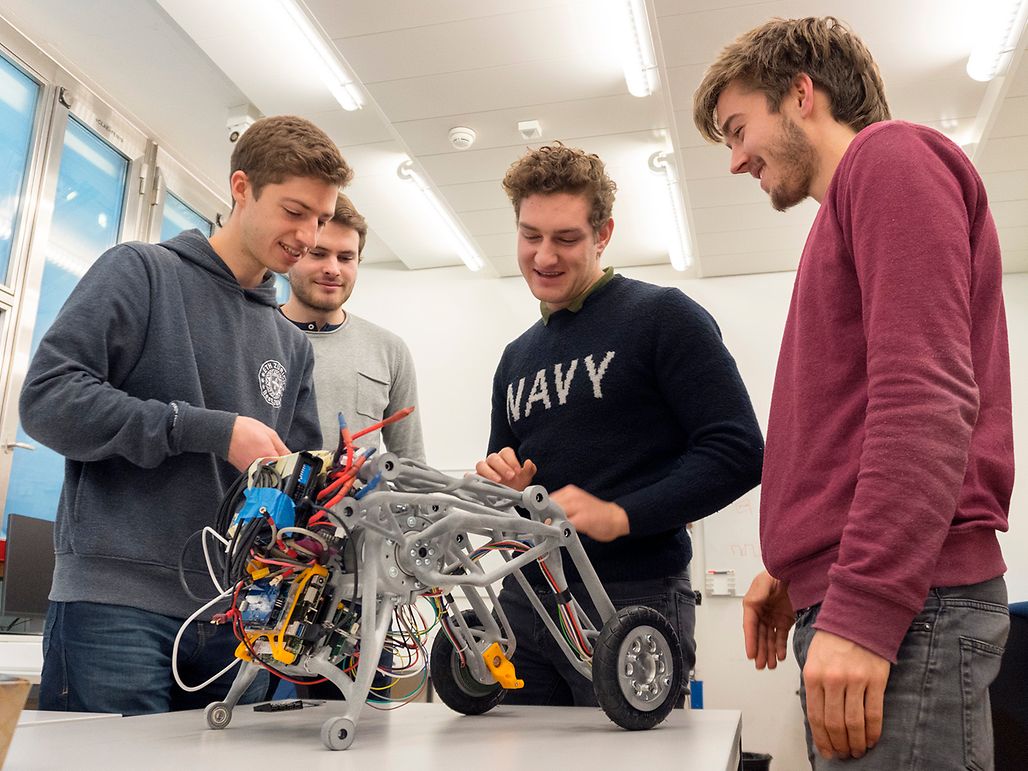
Van links: Florian Weber, Dominik Mannhart
Potentiële toepassingen voor de Ascento zijn bijvoorbeeld gebouwinspecties. Het voertuig kan bijvoorbeeld een huis binnengaan dat in brand staat of dreigt in te storten. Een ingebouwde camera kan dan waardevolle informatie aan reddingswerkers buiten het gebouw kunnen leveren. Er bestaan al verschillende robots voor deze doeleinden. “Vooral bij het traplopen bereiken veel robots echter de grens van hun kunnen,” aldus Marcus Vierneisel, die eveneens deel uitmaakt van de negenkoppige focusgroep. We streven ernaar dat de Ascento met de loopsnelheid van een mens een trap kan beklimmen. Doordat hij zo licht is en twee wielen heeft, is de Ascento sowieso wendbaarder dan andere robots. “Aan de andere kant zijn grotere robots in staat tot interactie met hun omgeving. Dit is iets wat Ascento niet kan,” voegt student werktuigbouwkunde Lionel Gulich toe. Uitgerust met sensoren kan de Ascento een gebouw verkennen en in korte tijd 3D-scans van de kamers kunnen maken. Vanzelfsprekend zal het prototype nog niet in staat zijn om zelf een heel gebouw te verkennen. Het kan echter wel een trap te naderen met behulp van afstandsbediening en vervolgens zijn sensoren gebruiken om de spronghoogte en spronglengte te meten en te berekenen die nodig zijn om de tredes te nemen. “Elke sprong op afstand in gang zetten zou te ingewikkeld zijn en te traag verlopen,” aldus Florian Weber. Dit plaatst de Ascento in de categorie van semiautonome robots.
Het is nog onzeker of het Ascento-prototype van het focusproject uiteindelijk een inspectierobot zal worden die klaar is voor commerciële productie. Dit is echter niet het primaire doel. Focusprojecten dienen vooral om ETH-studenten praktijkervaring op te laten doen. Zo kunnen de studenten aan een echt project meewerken in plaats van dat ze alleen theorie leren.
De studenten krijgen technische en financiële steun van aandrijfspecialist maxon motor, als onderdeel van het Young Engineers Program (YEP). De aandrijvingen van de Ascento bevatten twee platte maxon EC 90 motoren. Technisch gezien is het koppel van 963 mNm dat deze motoren leveren een beetje overgedimensioneerd wanneer de robot zich op één niveau verplaatst. De aandrijvingen komen het best tot hun recht wanneer de Ascento in evenwicht wordt gebracht na de landing op een smalle trede, omdat dit een hoog koppel en een nauwkeurige controle vereist. De ETH-studenten besloten de frameloze versie van de motoren te gebruiken. De rotor en stator worden apart en zonder uitgaande as geleverd en pas tijdens de integratie in het systeem aangesloten. Vooral in de robotica zijn frameloze motoren van maxon vaak de eerste keuze, omdat ze ruimtebesparend en elegant in gewrichtsconstructies kunnen worden geïntegreerd. Elke motor wordt door een EPOS4-module aangedreven.
Copyright afbeeldingen
Adrian Venetz / maxon motor