Expert blog
Een encoder uitkiezen - deel een: Eigenschappen

Hoe kies ik de juiste encoder voor mijn toepassing? In deze blog geven we een paar antwoorden.
De feedbacksensor die bij uitstek voor veel toepassingen met kleine motoren wordt gebruikt, is de digitale incrementele encoder. In deze blogartikelen nemen we de belangrijkste encodereigenschappen nog eens onder de loep, alvorens nader in te gaan op toepassingen waarbij positiebepaling of snelheidsbepaling centraal staan.
Wat zijn typische vereisten?
Elke toepassing is anders. Soms is de hoofdtaak positiebepaling, soms snelheidsbepaling. De mate van precisie bij snelheids- of positiebepaling kan heel verschillend zijn. Daarom moet deze worden bepaald voordat een encoder wordt gekozen. Voor een snelheidsregeling bij een laag toerental (minder dan 100 rpm) is een betere feedback nodig dan voor een snelheidsregeling bij een hoog toerental (1000 rpm).
De encoder kan rechtstreeks aan de motor worden gekoppeld of er wordt gebruikgemaakt van een mechanisch overbrengingssysteem, zoals een tandwiel, een schroef of een ander systeem. Encoders worden gewoonlijk op de motoras gemonteerd, maar kunnen ook op de motor zelf worden aangebracht. De mechanische eigenschappen van het overbrengingsmechanisme beïnvloeden de keuze van de encoder: er moet rekening worden gehouden met tandwielreductie en mechanische speling.
Temperatuur, trillingen, elektromagnetische interferentie of andere omgevingsomstandigheden kunnen ook van invloed zijn op de keuze van de encoder. Optische encoders moeten bijvoorbeeld tegen stof worden beschermd. Magnetische encoders kunnen gevoelig zijn voor externe magnetische velden - inclusief die van de motor - en dienen daarom eventueel afgeschermd te worden.
Wat zijn de belangrijkste eigenschappen van incrementele encoders?
De karakteristieke parameter van een incrementele encoder is het aantal rechthoekige pulsen per motoromwenteling. Meestal zijn er twee signalen oftewel kanalen die hetzelfde aantal pulsen leveren. De twee signalen hebben een relatieve faseverschuiving van een kwart pulslengte. Hiervan kan de draairichting van de motor worden afgeleid en kunnen 4 verschillende toestanden per puls worden onderscheiden. Deze toestanden worden ook wel quadcounts of quadratuursignalen genoemd. Zij geven de werkelijke resolutie weer, die 4 keer hoger is dan het aantal pulsen op één pulstrein. Een encoder met 1000 cpt (tellingen of pulsen per omwenteling) verstrekt 4000 toestanden per omwenteling of een nominale resolutie van 360°/4000 = 0,09°.
Let op: Wanneer men het over de resolutie van een encoder heeft, moet duidelijk zijn of men het aantal pulsen per kanaal (cpt) of het aantal toestanden (de quadcounts) bedoelt.
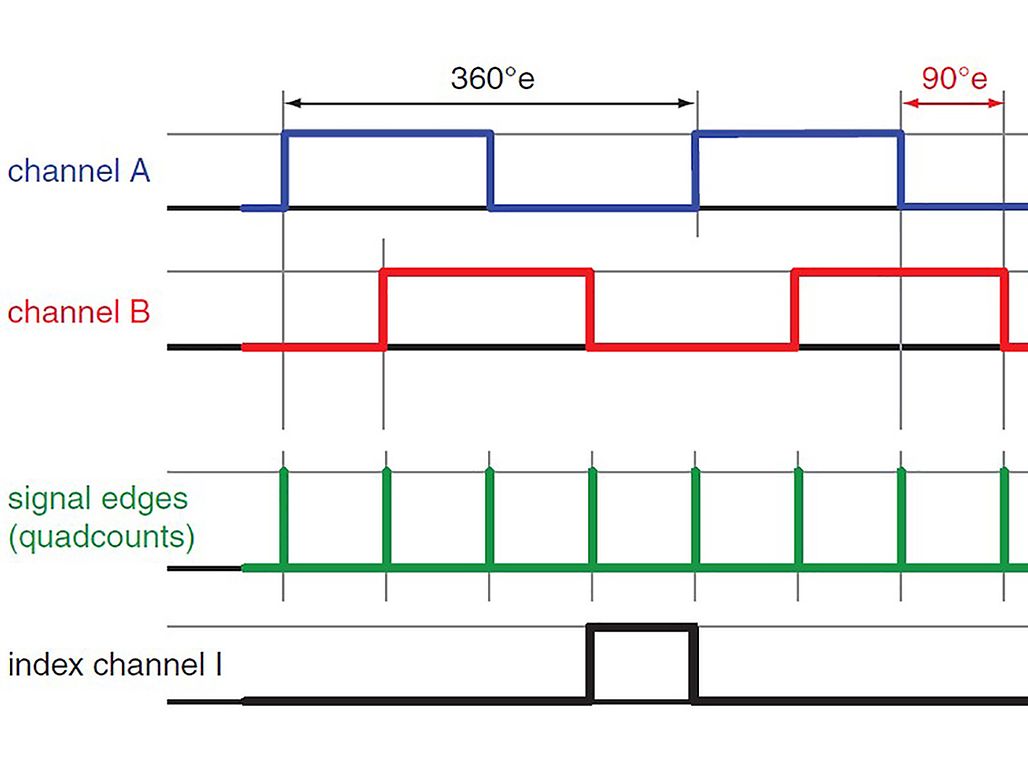
De signalen van een digitale incrementele encoder. Het tellen van de toestandsveranderingen (de signaalhoeken van kanaal A en B) levert een 4 maal hogere resolutie op dan het aantal tellingen per omwenteling op één encodersignaal.
De encoderresolutie kan enorm variëren. Van een zeer eenvoudige 1 cpt-encoder (of 4 toestanden) die alleen verplaatsingen kan bepalen, tot meerdere 10.000 cpt voor zeer precieze positie- of snelheidsfeedback. Er zijn vele factoren die de haalbare encoderresolutie beïnvloeden: het fysisch meetprincipe (optisch, magnetisch, inductief ...), het primaire signaaltype (analoog of digitaal), de signaalbehandeling (bijvoorbeeld interpolatie), en de mechanische lay-out, om er enkele te noemen. Deze blog gaat echter niet over het ontwerp van encoders, maar over de vraag welke encoders aan bepaalde toepassingsvereisten kunnen voldoen.
Hoe nauwkeurig zijn encoders?
Resolutie - het aantal toestanden - geeft de nominale precisie aan, de positie is bekend binnen een fout van 1 toestand. De encoderpulsafstand kan echter variëren als gevolg van mechanische toleranties (bijvoorbeeld asuitloop, lengte van de magnetische polen enz.). De pulsen in één bereik van de motoromwenteling kunnen korter zijn dan de pulsen van andere bereiken. Daardoor wijkt de gemeten positie periodiek af van de werkelijke positie gedurende één motoromwenteling.
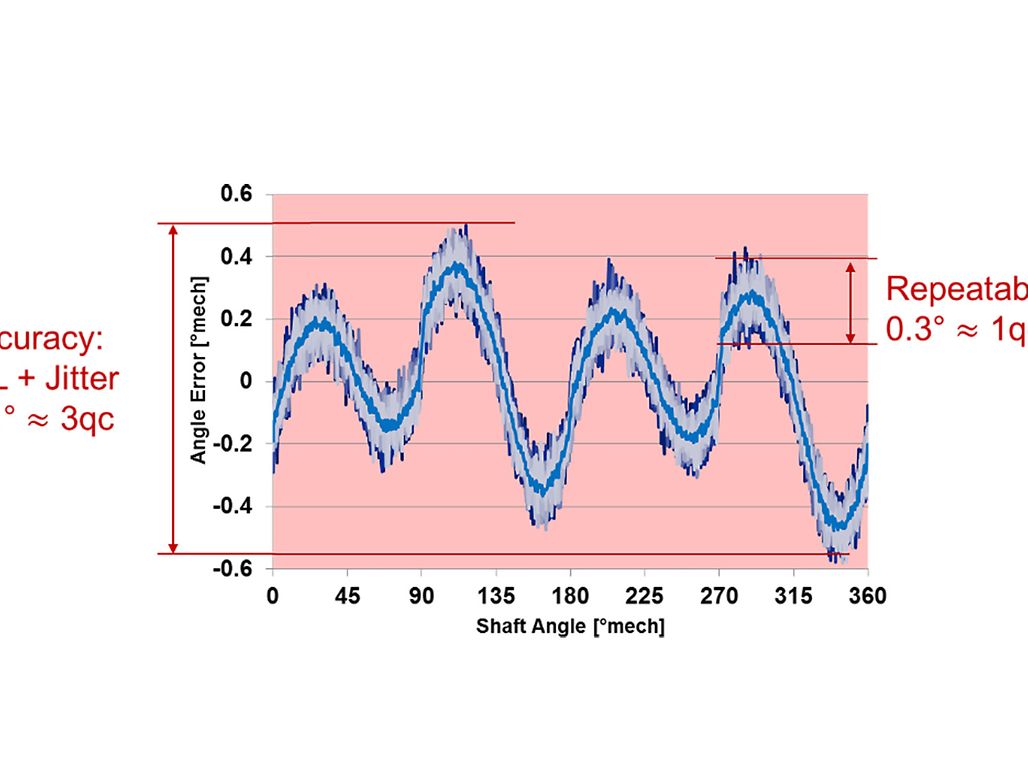
Een voorbeeld van gemeten niet-lineariteit van een magnetische geïnterpoleerde encoder met 256 cpt. De afwijking van de perfecte positie wordt getoond als functie van het encodersignaal (1024 quadcounts). Het diagram bestaat uit 25 metingen van 1 omwenteling. Men kan duidelijk zien dat de afwijking zich na één omwenteling herhaalt. De afwijking van de gemiddelde absolute positie bedraagt ongeveer +/- 0,45° of in termen van integrale niet-lineariteit ongeveer 0,9°. Bij een gegeven encoderpositie is de signaalruis (jitter) ongeveer 0,3°, wat exact overeenkomt met een variatie van 1 toestand (360° / 1024 = 0,35°).
De maximale afwijking (piek tot piek) wordt integrale niet-lineariteit (INL) genoemd. INL is belangrijk voor toepassingen die een absolute positieprecisie vereisen. De herhaalbaarheid - d.w.z. dezelfde positie voor een bepaalde ingestelde waarde wordt altijd bereikt - wordt niet beïnvloed door INL. De herhaalbaarheid is veeleer een kwestie van signaaljitter, die meestal minder dan 1 toestand bedraagt.
Incrementele encoders en absolute posities?
Incrementele encoders geven alleen positieveranderingen aan. Voor absolute positionering moet eerst een referentie- of thuispositie worden bepaald. Dit gebeurt door het mechanisme naar een externe referentie te bewegen; dit kan een mechanische eindstop of een eindschakelaar zijn.
Sommige encoders beschikken over een derde signaal met één puls per omwenteling. De hoeken van dit indexkanaal leveren absolute positiereferenties binnen één omwenteling. De beperkte precisie van externe referenties kan worden verbeterd door een extra beweging naar een van de indexkanaalhoeken. Maar let op: het indexsignaal is geen voorwaarde voor positionering. Het is zelfs zo dat machinebouwers het gebruik van de index trachten te vermijden, omdat men opnieuw moet kalibreren als een motor-encoder moet worden vervangen. Bovendien gebruiken sommige controllers het indexkanaal voor een kruiscontrole van het encodersignaal en voor de bewaking van de encodertellingen per omwenteling.
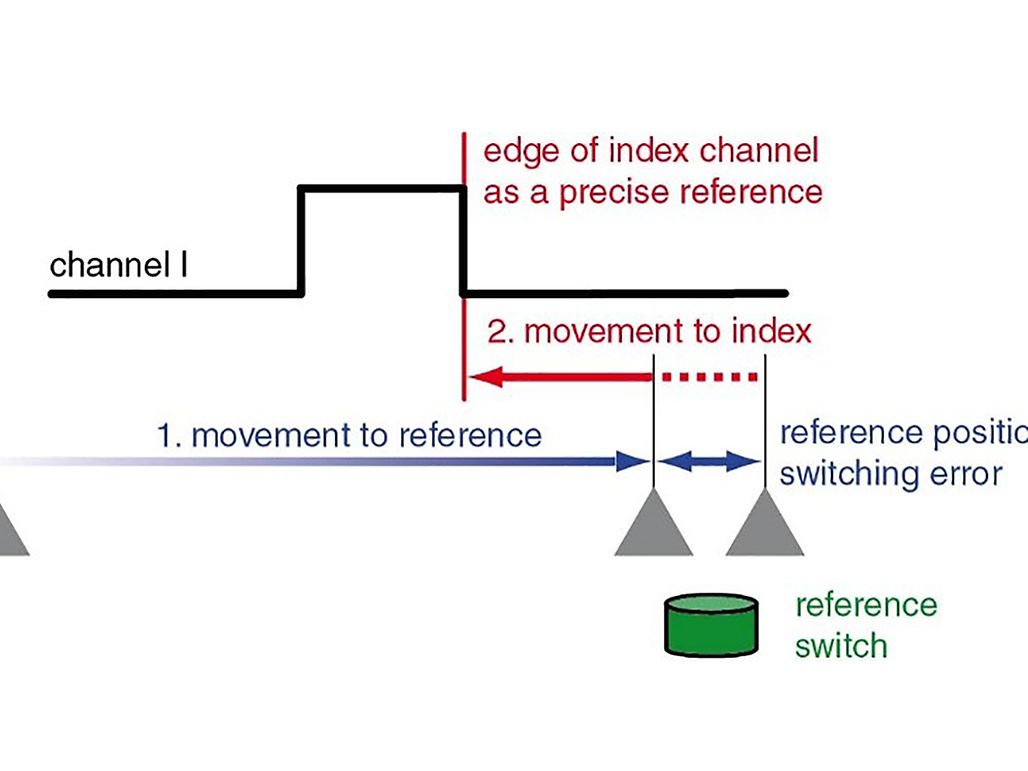
Verbetering van de precisie van de referentiepositie door een extra verplaatsing naar de hoek van het indexpulstreinsignaal.
Waarop letten bij het uitzenden van het signaal?
Niet in de laatste plaats ten behoeve van een betere signaalkwaliteit adviseren we voor transmissie over lange afstanden het gebruik van lijndrivers. Voor positionering is een lijndriver bijna een voorwaarde, om te voorkomen dat encoderpulsen worden gemist.
Linedrivers genereren inverse signalen (Ā, B̄, Ī) voor elk kanaal (A, B, I). Elk signaalpaar wordt samen verstuurd en het verschil wordt geëvalueerd, zodat eventuele elektromagnetische interferentie tijdens de signaaloverdracht wordt uitgefilterd. Als positieve bijwerking is de signaalkwaliteit verbeterd, zijn de signaalhoeken duidelijker gedefinieerd en maakt de driverfunctie de transmissie van het signaal over grotere afstanden (tot ongeveer 30 m) mogelijk.
Encoders hebben een minimale voedingsspanning nodig. Bij lange encoderafstanden kan de lijnweerstand en het optredende spanningsverlies een probleem vormen. Controleer de kabeldoorsnede en de voedingsspanning.
Omgevingsomstandigheden, robuustheid
Het standaard bedrijfstemperatuurbereik van encoders ligt tussen -30 °C en +100 °C. Dit beantwoordt aan de meeste toepassingen en past bij de warmte die de motor produceert.
In sterk vibrerende toepassingen en bij mechanische schokken zijn een robuuste mechanische behuizing en een goede trekontlasting van de kabels cruciaal.
Terwijl optische encoders minder gevoelig zijn voor elektromagnetische storingen, hebben magnetische encoders een goede afscherming tegen magnetische strooivelden nodig. Als de behuizing niet goed gesloten en ondicht is, kan in optische encoders stof binnendringen.
In volgende blogartikelen wil ik nader ingaan op hoe je een encoder uitkiest voor positie- en snelheidsbepaling.