maxon Inside
Een encoder uitkiezen – deel drie: Snelheidsbepaling

Voor een zeer nauwkeurige snelheidsbepaling zijn de hoogste encoderresoluties vereist, zo blijkt uit een diepgaande analyse. De encoderresolutie neemt toe met het kwadraat van de vereiste snelheidsprecisie. Daarnaast is een snelle regellus nodig en heeft een hoge massatraagheid een gunstig effect op de stabilisering van de snelheid.
- Denk eraan: Niet alleen de resolutie van de encoder is van invloed op een precieze en dynamische snelheidsbepaling. De performance van het systeem als geheel is bepalend. De reactietijd kan worden begrensd door stroom- en spanningsbeperkingen van de voeding en de controller, door de samplefrequentie van de regellus, door massatraagheid, wrijvingsdifferentiatie en mechanische speling.
Hoe werkt snelheidsbepaling met incrementele encoders?
De snelheid wordt in de controller als het ware berekend, namelijk door het aantal toestandsveranderingen binnen een bepaald tijdsinterval te tellen. Een EPOS2 heeft een samplefrequentie van 1 kHz. Om die reden wordt het interne toerental gemeten in hele getallen per ms (qc/ms), wat overeenkomt met een toerentalresolutie van 30 rpm op een 500 cpt-encoder (2000 qc per omwenteling). Hoe lager de encoderresolutie, hoe hoger deze snelheidskwantisatie.
Benadrukt moet worden dat dit een metrologisch probleem is op grond van de digitale dataverwerving. Wat je meet is niet hoe het systeem zich gedraagt. Het werkelijke motortoerental wordt als richtwaarde overgenomen, en deze wordt vanwege de mechanische traagheid (vliegwieleffect) gehandhaafd. Het zijn de gemeten waarden die rond de gemiddelde snelheid schommelen.
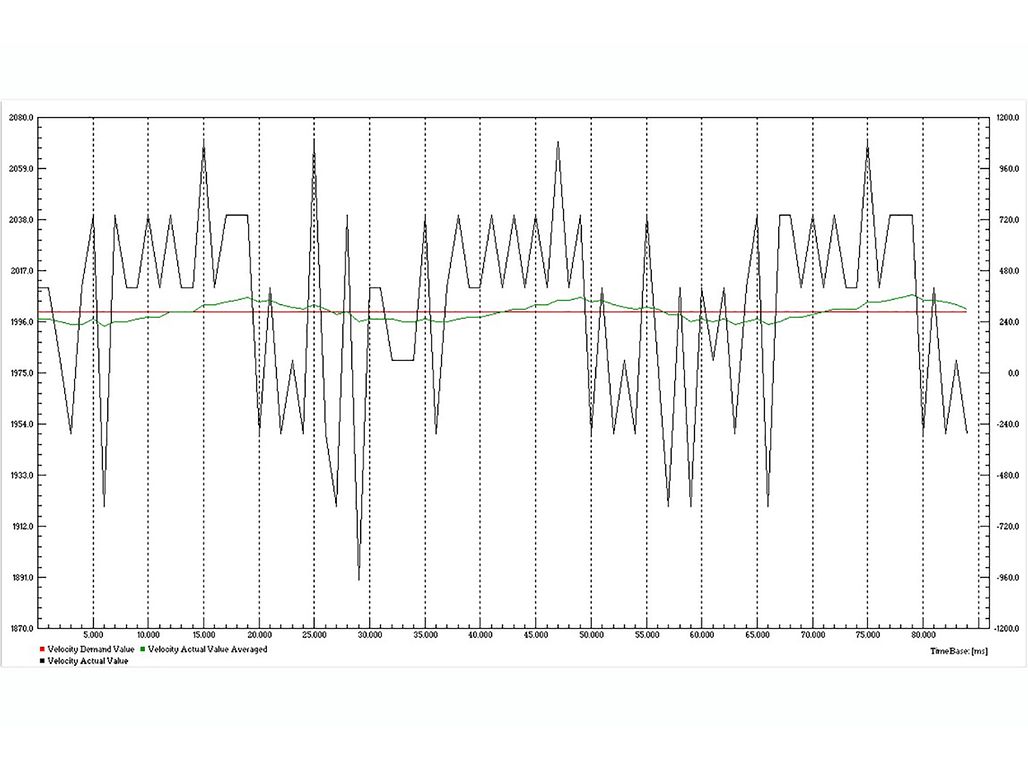
Snelheidssignalen opgenomen op een motor met een maxon MR encoder. (Screenshot van de EPOSS2 Studio Data Recorder.) De zwarte lijn stelt de snelheidsaflezing van de sensor voor. Hij springt in stappen van 30 rpm, wat overeenkomt met een resolutie van 1qc/ms. Bovendien vertoont het signaal een periode van 30 ms die overeenkomt met 1 motoromwenteling (in tijd). De groene gemiddelde snelheid geeft deze periodiekheid duidelijker weer. Dit gemiddelde snelheidssignaal ligt dichter bij de werkelijke snelheid van de motor. In dit geval weerspiegelt het echter eerder de onvolkomenheden van de encoder. Overigens wijkt de toerentalnauwkeurigheid van het gemiddelde signaal ongeveer 3 rpm af bij een toerental van 2000 rpm - en dat is best goed!
Snelheidsbepaling bij hoge toerentallen
De elektronische componenten van de encoder beperken de maximale pulsfrequentie die kan worden verwerkt, met als gevolg dat de maximumsnelheid van de encoder begrensd wordt. In sommige gevallen vloeit deze begrenzing voort uit mechanische factoren zoals onbalans en montagetoleranties.
En er moet ook rekening worden gehouden met de frequentiebeperkingen bij de encoderingang, aan de kant van de controller. Indien zeer hoge snelheden vereist zijn, moet een passend lage encoderresolutie worden gekozen.
Een relatieve variatie in snelheid van enkele procenten bij hoge toerentallen van enkele duizenden rpm komt overeen met een absolute nauwkeurigheid van enkele 10 rpm en kan vrij gemakkelijk worden bereikt.
Regel #4: Encoder voor hoge snelheidsregeling (> 500 rpm)
Kies een encoder met een matig of laag aantal toestanden en een voldoende hoge maximumsnelheid. In veel gevallen is de maxon EASY encoder de perfecte oplossing. Een uiterst precieze optische encoder is meestal niet nodig. Vuistregel: (toerental in rpm) x (encoderresolutie in cpt) > 100.000 rpm cpt is voor de allermeeste toepassingen voldoende.
Snelheidsbepaling bij lage toerentallen
Het principe van toestandsveranderingen binnen een tijdsinterval te tellen werkt goed voor hoge snelheden. De snelheid kan zo goed worden bepaald. Maar bij lage snelheden is dit lastiger. Stelt u zich een snelheid van 60 rpm voor. Dit betekent dat 1 omwenteling per seconde moet worden aangehouden met een precisie van 5 % of 3 rpm. Met dezelfde 500 cpt-encoder en 1 ms zoals in het bovenstaande voorbeeld, haalt u nooit een stabiele en soepel geregelde snelheid.
Om het absolute snelheidsbereik te reduceren, heeft u een hogere encoderresolutie en een snellere besturing nodig. Stelt u zich een encoder met 5000 cpt voor in de hierboven beschreven situatie; u krijgt 10 keer meer feedback. Maar bij lage snelheden moet de regellus ook sneller kunnen reageren om de absolute toerentalafwijking klein te houden. Beide factoren stellen hogere eisen aan de encoder. De encoderresolutie neemt toe met het kwadraat van de absolute stabiliteit van de snelheid: De helft van het toegestane snelheidsbereik vereist een encoderresolutie die 4 keer hoger is.
Sommige controllers beschikken over een andere mogelijkheid om de snelheid bij lage toerentallen te evalueren. Bij deze methode wordt de tijd gemeten die tussen 2 toestanden verstrijkt. De feedbackwaarden m.b.t. de snelheid zullen homogener zijn, waardoor een stijvere en meer dynamische afstelling mogelijk is.
De EPOS4-controller maakt het gebruik van een andere methode bij lage snelheden mogelijk, de zogenaamde speed observer. De ‘speed observer’ is een element in de regellus. Het berekent de geregistreerde snelheid in twee stappen. Ten eerste worden de snelheid, de positie en het externe koppel voorspeld op basis van de parameters die de mechanische overbrengingsfunctie van het systeem bepalen. Ten tweede worden de voorspelde waarden op basis van de nieuw gemeten rotorpositie gecorrigeerd.
Maar toch hebben een encoder met een hoge resolutie en een snelle controller voordelen.
Regel #5: Encoder voor lage snelheidsregeling (< 100 rpm)
Kies een encoder met een groot of zeer groot aantal toestanden in combinatie met een snelle controller.