maxon Story
De technologie achter robotsystemen voor onkruidbestrijding


De ontwikkeling van dit onkruidrobotsysteem voor de commerciële groenteteelt vereist een hightech visionsysteem, machine learning-technologie en de juiste motoren.
Vision Robotics Corporation (VRC) en haar dochterondernemingen ontwikkelen robotsystemen voor vele verschillende toepassingen met behulp van de nieuwste technologieën door gebruik te maken van AI die op computer vision is gebaseerd. Dit omvat kaart-, lokalisatie- en navigatiesystemen, en machines die interageren met objecten in de echte wereld. AI behelst verschillende technieken voor machine learning, waaronder deep learning, en geavanceerde besturingen voor bewegingscomponenten zoals dynamische armcontrole. Dankzij de robuuste en kosteneffectieve benadering van de oplossingen van het bedrijf kunnen hun robots autonoom driedimensionale kaarten van onbekende gebieden maken, of het nu gaat om het in kaart brengen van een gebouw of het modelleren van een wijngaard. De kaarten en modellen stellen robots in staat een groot aantal taken intelligent en nauwkeurig uit te voeren, zoals het stofzuigen van vloer of het snoeien van de wijnstok.
De ervaring en creativiteit die het Vision Robotics-team zijn klanten biedt, maakt hen tot uitstekende partners bij het ontwikkelen van robotsystemen. De volgende generatie robots vereist mobiliteit en het vermogen tot interactie met de zich steeds veranderende wereld. Met behulp van de software en ondersteunende technologie van VRC kunnen robots complexe omgevingen autonoom en op betrouwbare wijze verkennen, leren begrijpen en erin werken. Door de technologie van VRC's te koppelen aan de huidige generatie krachtige, goedkope microprocessors, solid-statecamera's, hightechmotoren en andere essentiële componenten, worden betaalbare, hoogwaardige, vision-gebaseerde mobiele robots haalbaar.
Uitdagingen bij het ontwerp van een gewascultivator
Cultivators bestonden traditioneel uit messen of andere werktuigen die achter een trekker werden getrokken om de grond op een veld los te maken. In het recente verleden werden cultivators en andere schoffelmachines uitgerust met een secundaire zijverschuiving, zodat de precisie van het werktuig niet afhing van de rechte rijlijn van de tractor of plantrijen, omdat een vast positie van de cultivator ten opzichte van het de plantrij werd aangehouden, zelfs als de bestuurder een beetje zigzagde. Vanwege de tolerantie bleef echter een minimale ruimte tussen de cultivator en het gewas noodzakelijk om te voorkomen dat het gewas zou worden beschadigd. De grond tussen de planten op de rij werd evenmin bewerkt door deze traditionele cultivators.
Inline cultivators bestaan inmiddels al een paar jaar. Concurrenten gebruikten een hydraulisch besturingssysteem dat symmetrisch werkt. Deze systemen vereisten dat de werkbreedte en de snelheid van de cultivatorbladen bij het openen en sluiten een specifiek instelpunt nodig hadden, waarbij dat instelpunt vooraf werd bepaald. Omdat de bladen aan weerszijden van de rij symmetrisch open en dicht gingen, konden planten gemakkelijk worden beschadigd als de planten of de veldomstandigheden te veel van het standaardomstandigheden afweken (zie afbeeldingen 1A en 1B).
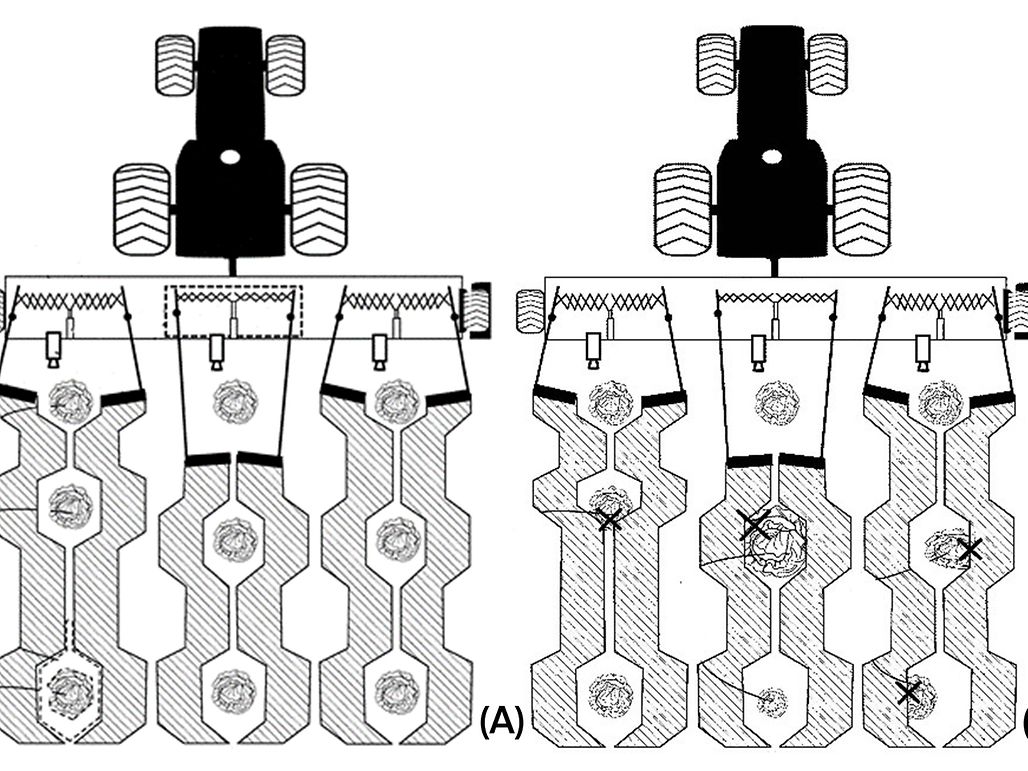
Afbeelding 1: Standaard hydraulische besturingssystemen van cultivators die momenteel in gebruik zijn, werken op grond van een vooraf bepaalde snelheid en open/dicht-breedte, wat plantschade kan veroorzaken.
De VRC-cultivator
Het nieuwste ontwerp van VRC maakte gebruik van onafhankelijke elektromotoren. Dit betekent dat de messen zich aan alle kanten van de plant volledig aan de plantcontour kunnen aanpassen, wat tot een verbeterde werkprecisie rond de planten leidt (zie afbeelding 2). Deze toepassingsstrategie betekende dat het VRC-team motoren moest vinden die over het koppel en de acceleratie beschikten die nodig waren om dergelijke zware bedrijfsomstandigheden gedurende lange tijd en in elke denkbare omgeving aan te kunnen. Verder had het bedrijf AI-technologie en neurale netwerken nodig. In dit geval onderwierp het bedrijf de plantdetectie aan deep learning. Zo was het eenvoudiger om een trainingsset met beelden van het gewas en het onkruid te maken.
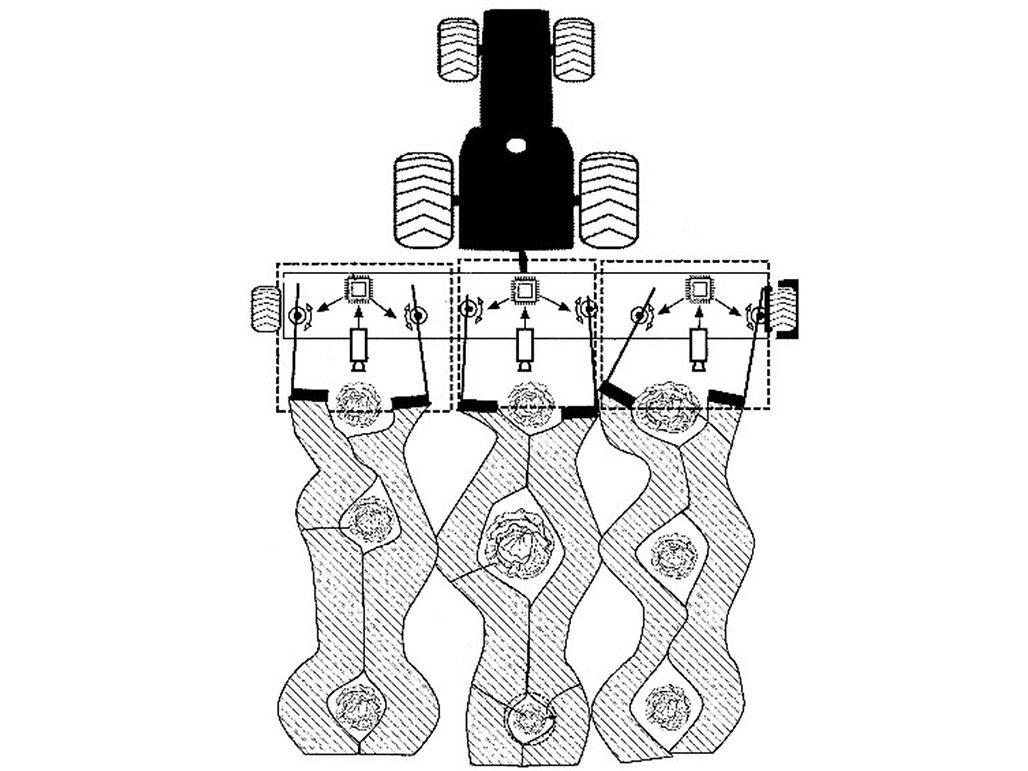
Afbeelding 2: De meerwaarde van het gebruik van een elektrisch aangedreven systeem in plaats van een hydraulisch systeem blijkt uit de manier waarop de onafhankelijke armen beter rond de plant kunnen manoeuvreren.
De VRC-cultivator is een inline cultivator die de grond belucht terwijl hij tussen de rijen planten schoffelt, of het nu om sla, broccoli, bloemkool of een ander gewas gaat. Het systeem wordt getraind op basis van 100 tot 1000 foto’s van gezonde planten, dode planten en gewoon onkruid om het perfecte algoritme voor de werkzaamheid te creëren. Het systeem bevat een visionsysteem om beelden van planten te maken. Het camerasysteem ‘herkent’ automatisch verschillende plantgroottes, soorten en bodembedekkingen onder zeer uiteenlopende lichtomstandigheden. De beelden worden in real-time verwerkt op grond van de deep learning technologie. Deep learning wordt toegepast in plaats van andere technologieën voor machine learning vanwege de flexibiliteit en de eenvoudige aanpassing aan toekomstige omstandigheden. Het systeem identificeert elke plant en de exacte grootte en locatie van zowel de gewassen als het onkruid. De hieruit voortvloeiende algoritmes zetten deze informatie om in timinggegevens die worden gebruikt voor de dynamische armregeling van de precisiebediende actuatoren voor de cultivatorbladen (zie afbeelding 3).
Met behulp van software worden voor elke gewasgroep de vereiste open- en sluittrajecten berekend. De operator bepaalt hoeveel ruimte de bladen om de planten heen krijgen, inclusief hoever de schoffel onder het bladerdak mag reiken. Het systeem kan tot 3 mph werken, maar werkt doorgaans met 1 mph. De bestuurder bepaalt de snelheid op basis van de omgevings- en gewasomstandigheden. Hoe hoger de snelheid, hoe meer en verder vuil wordt opgeworpen, wat het gewas kan beschadigen of verontreinigen. Sla is bijvoorbeeld bladrijk en groeit dicht bij de grond. Een te hoge snelheid kan ertoe leiden dat de bladeren vuil worden. Daarom moet een schoffelrobot voor sla langzaam genoeg werken om niet veel stof te doen opwaaien. Normaal gesproken kan een schoffelmachine voor sla ongeveer een mijl per uur afleggen en toch een schoon en gezond product afleveren.

Afbeelding 3: Door de integratie van geavanceerde computer vision, deep learning en individueel bestuurde motoren is deze cultivator in staat om onkruid en kluiten dicht bij de planten te verwijderen zonder het gewas te beschadigen.

maxon’s borstelloze EC-i motoren met ijzeren wikkelingen beschikken over een zeer hoge koppeldichtheid en een laag restkoppel. De meerpolige interne rotor is uiterst dynamisch. Het solide design met een stalen flens en behuizing maakt deze motor voor een groot aantal toepassingen geschikt.
Componenten van het bewegingssysteem
Zoals hierboven vermeld, worden voor het wieden elektromotoren ingebouwd die onafhankelijk van elkaar werken. De reden hiervoor is dat het mes aan elke kant van de plant volgens de specifieke aan de plant aangepaste contour kan werken, wat een betere werkprecisie mogelijk maakt. De messen kunnen zo dichter bij de plant komen en zorgen voor een schonere onkruidverwijdering, wat een aanzienlijk prestatievoordeel oplevert ten opzichte van andere systemen. De toepassingsstrategie van het team hield in dat het motoren nodig had die over het koppel en de acceleratie beschikten die nodig waren voor een zeer dynamische beweging.
De motoren die het VRC-team koos waren twee maxon EC-i 52 motoren. De EC-i 52 is een elektronisch gecommuteerde borstelloze gelijkstroommotor van 420 W met een ingebouwde hall-sensor voor feedbackdoeleinden. De motoren reageren snel en zijn in staat de messen dicht om elke plant heen te leiden zonder deze te beschadigen. De belangrijkste kenmerken van de elektronisch gecommuteerde EC-motoren van maxon zijn de eersteklaskoppelprestaties, het hoge vermogen, het extreem grote snelheidsbereik en de ongeëvenaarde lange levensduur. Door de uitstekende regelbaarheid van de motoren zijn hoogprecieze positie-aandrijvingen mogelijk.
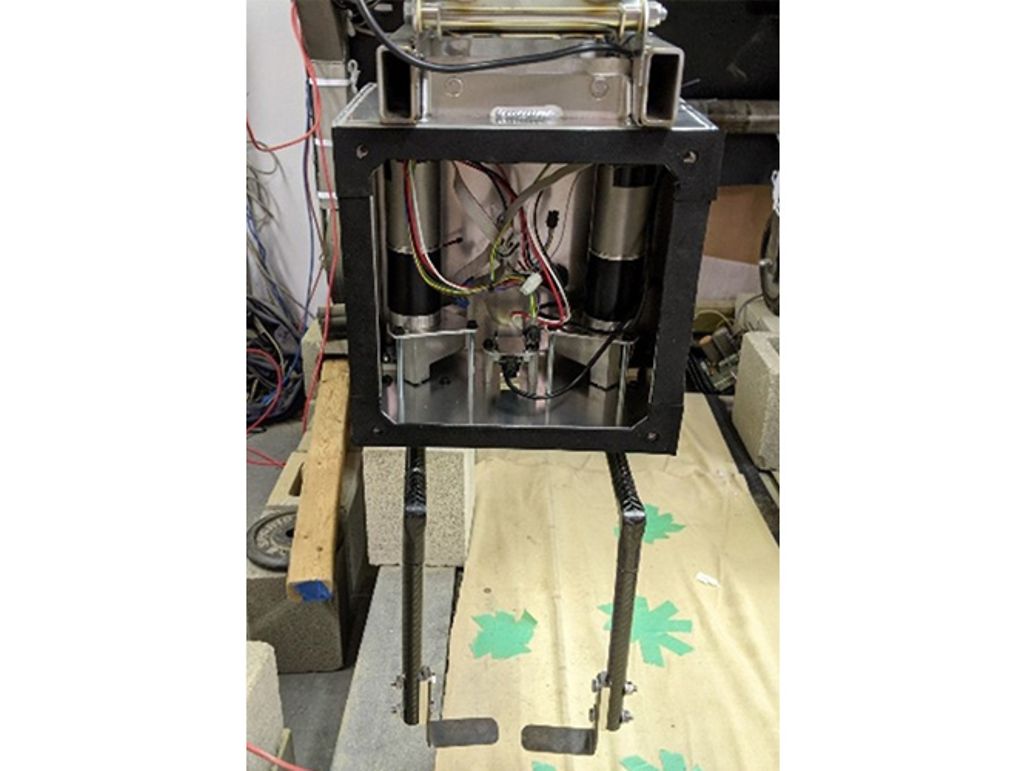
Afbeelding 4: Let op de plaats van de twee maxon EC-I 52 motoren met hoog koppel en GP52 overbrengingen in de behuizing van de VRC-cultivator.
Behalve de motoren bevat het bewegingssysteem van de VRC-cultivator twee GP52-overbrengingen, eveneens ontwikkeld en geproduceerd door maxon (zie afbeelding 4). De overbrengingen zijn nodig voor de hoge koppels die wederom vereist zijn om vuilkluiten kapot te maken terwijl rond de planten wordt gewied. Deze keramische componenten leveren een koppel tot 30 Nm, afhankelijk van het gebruikte model. Tijdens de ontwerpfase moest rekening worden gehouden met de lengte van de robotarm, de werksnelheid en de specificatie van het vereiste koppel (op grond waarvan de messen tijdens normaal bedrijf door de grond kunnen snijden).
Conclusie
In elke toepassing van Vision Robotics Corporation zit creativiteit en ervaring. Toen het bedrijf de capaciteiten van de nieuwste cultivators voor commerciële boerderijen wilde opvoeren, wendde het zich tot maxon. De componenten van maxon konden aan de hoge eisen wat betreft koppel en toerental voldoen. Hierdoor behield de cultivator van RVC tijdens de werking zijn precisie en nauwkeurigheid en was hij evengoed nog tegen de zware omstandigheden in de commerciële landbouw bestand.