Young Engineers Program
Un passo avanti

Le scale sono ancora ostacoli insormontabili per molti robot, ciò nonostante un giovane team dell'ETH di Zurigo sta realizzato un veicolo progettato per affrontare i gradini con facilità: saltandoli.
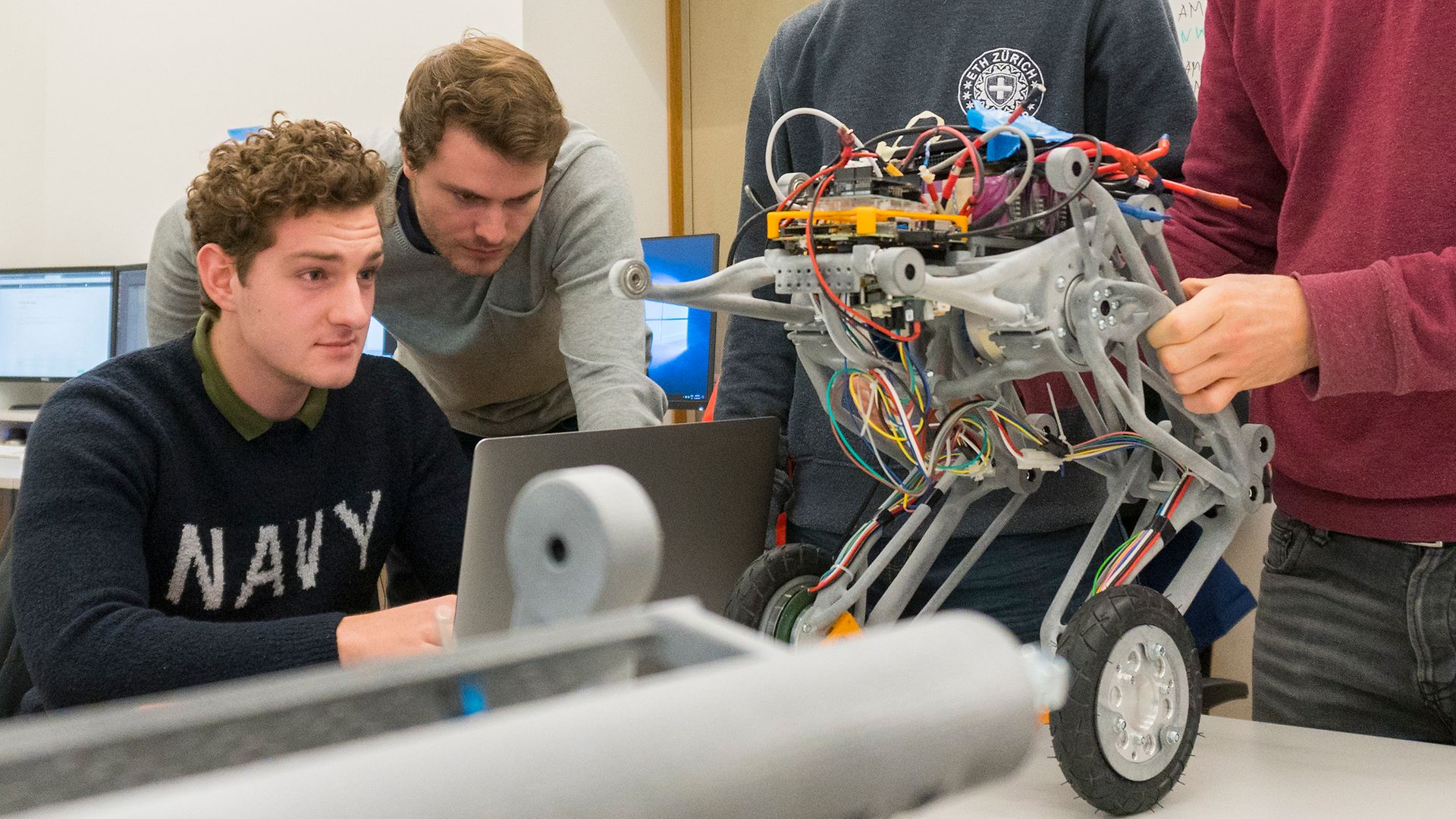
"Ascento" è il nome che i creatori, un team di otto studenti specializzati in ingegneria meccanica e uno di ingegneria elettrica, hanno dato al sofisticato dispositivo. Il robot è alquanto speciale: si sposta e si tiene in equilibrio su due ruote. Dal punto di vista della progettazione ciò è molto più difficile che costruire un dispositivo su quattro ruote. Tuttavia, un robot bipede fornisce mobilità e adattabilità migliori su diversi tipi di terreno.
E non è tutto: l'obiettivo principale dei nove promettenti ingegneri è consentire al robot di saltare. Vogliono che sia in grado di saltare in alto, come un canguro, e atterrare di nuovo in sicurezza sulle due ruote. “Questo consentirebbe al robot di superare le scale e altri ostacoli,” spiega lo studente Florian Weber. Il team Ascento è nato da un progetto focus. In questo tipo di progetto, i laureandi di varie discipline hanno l'opportunità di applicare le loro conoscenze a un progetto concreto: dallo sviluppo di un'idea iniziale alla realizzazione diun prototipo funzionante.
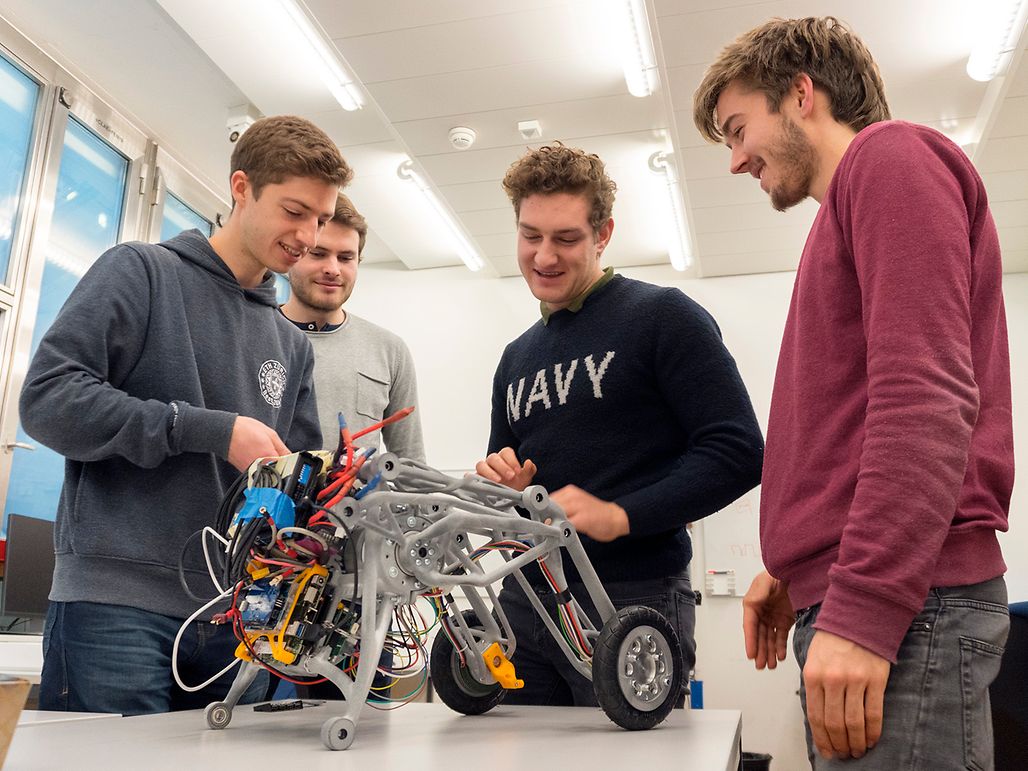
da sinistra: Ciro Salzmann, Marcus Vierneisel, Lionel Gulich, Florian Weber
La caratteristica speciale di Ascento è il fatto che è progettato come un pendolo inverso: il baricentro è sopra l'asse. Di conseguenza Ascento è in grado di stare in posizione eretta e spostarsi solo fino a quando è alimentato e di mantenere l'equilibrio sulle ruote: come una persona in piedi che deve continuamente consumare energia per mantenere l'equilibrio. Ciò rende Ascento simile a un Segway, anch'esso infatti è azionato da due ruote sullo stesso asse e dotato di un azionamento controllato per mantenere l'equilibrio.
da sinistra: Florian Weber, Dominik Mannhart
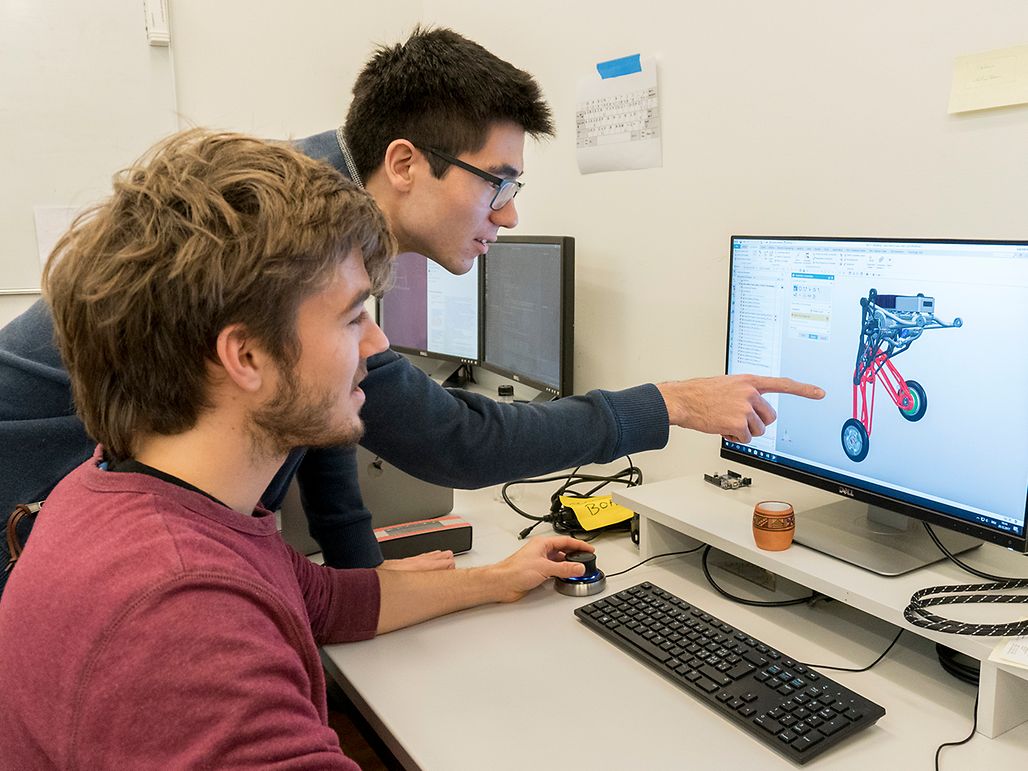
Potenziali applicazioni per Ascento sono ad esempio le ispezioni di edifici. Il veicolo potrebbe entrare in una casa in fiamme o a rischio di crollo. Una telecamera integrata fornisce preziose informazioni ai soccorritori all'esterno dell'edificio. Vi sono già diversi robot per questi scopi ma: "Soprattutto quando si tratta di salire le scale, molti robot raggiungono il limite delle proprie capacità," dichiara Marcus Vierneisel, tra i nove del gruppo di ricerca. L'obiettivo di Ascento è salire le scale con la stessa velocità di un essere umano. Grazie al suo leggero design su due ruote, Ascento è più agile degli altri robot. "D'altra parte i robot più grandi sono in grado di interagire con l'ambiente, una cosa che Ascento non può fare," aggiunge lo studente di ingegneria meccanica Lionel Gulich. Dotato di sensori, Ascento potrebbe esplorare un palazzo e fornire scansioni 3D delle stanze in poco tempo. Ovviamente il prototipo non sarà in grado di esplorare un intero edificio da solo, ma potrà avvicinarsi a una rampa di scale comandato da remoto e utilizzare i sensori per misurare altezza e lunghezza dei salti necessari per salire ogni gradino. "Avviare ogni salto da remoto sarebbe troppo complicato e lento," dice Florian Weber. Questo colloca Ascento nella categoria dei robot semi-autonomi.
Non si sa ancora con certezza se il progetto focus e il prototipo Ascento diventeranno alla fine un robot per ispezioni pronto per la produzione commerciale, ma non è questo l'obiettivo principale. I progetti focus servono principalmente per consentire agli studenti dell'ETH di mettersi alla prova con un progetto reale invece di dedicarsi solamente alla teoria.
Gli studenti ricevono l'assistenza tecnica e finanziaria del produttore specializzato di azionamenti maxon motor nell'ambito del Young Engineers Program (YEP) dell'azienda. Gli azionamenti di Ascento comprendono due motori flat maxon EC 90. Tecnicamente la coppia di 963 mNm fornita da questi motori è leggermente sovradimensionata quando il robot si sposta lungo un singolo piano. Gli azionamenti entrano in gioco quando Ascento torna in equilibrio dopo l'atterraggio su un gradino stretto in quanto questo richiede una coppia elevata e un controllo preciso. Gli studenti dell'ETH hanno deciso di utilizzare la versione frameless dei motori. Rotore e statore vengono forniti separatamente e senza un albero di trasmissione, e vengono collegati solamente durante l'integrazione in un sistema. Soprattuto nella robotica, i motori frameless di maxon sono spesso la prima scelta perché consentono un risparmio di spazio e una elegante integrazione nelle articolazioni. Ogni motore è azionato da un modulo EPOS4.
Copyright delle immagini
Adrian Venetz / maxon motor