maxon Story
Un esoscheletro medico per la riabilitazione

L'obiettivo da raggiungere: fornire una terapia di trattamento basata sui dati e intelligente per trattare disabilità motorie neurologiche e muscolo-scheletriche.
Il principale obiettivo di Harmonic Bionics è quello di sostenere pazienti e prestatori di cure progettando una tecnologia intelligente che faciliti un protocollo terapeutico basato sui dati per la cura di disabilità motorie neurologiche e muscolo-scheletriche. L'azienda si è quindi occupata dell'intera progettazione e dell'assemblaggio del proprio esoscheletro bilaterale per gli arti superiori Harmony SHR™.
Consentendo interventi precoci, ripetizione funzionale e una terapia basata sugli intenti, Harmony SHR dà agli utenti la possibilità di migliore l'efficienza e l'efficacia della riabilitazione della parte superiore del corpo. Fiore all'occhiello dell'azienda, Harmony SHR è progettato per fornire un valore unico in queste aree della pratica: ricerca neuroscientifica e delle scienze motorie, studio delle disabilità motorie e riabilitazione. Harmonic Bionics ha scelto componenti commerciali off-the-shelf (COTS) da integrare nei vari attuatori per la robotica in base ai requisiti di ogni attuatore per semplificare gli sforzi di progettazione del prodotto. A volte la società ha dovuto scendere a piccoli compromessi nella fase di progettazione, ad esempio tra le dimensioni degli attuatori e capacità di carico/peso e tra la coppia massima e la sensibilità alla coppia. Il prodotto finale è sufficientemente resistente da supportare l'esercizio fisico senza essere troppo pesante o ingombrante.
Solitamente nelle applicazioni con bracci robotizzati, i pazienti devono essere separati dai bracci robotizzati in modo che il robot non possa ferire la persona durante il movimento. La maggior parte dei bracci robotizzati sul mercato non è progettata per interagire in sicurezza con gli umani, non può rilevare una persona sul percorso durante l'esecuzione dell'attività programmata. Per questo i robot tradizionali possono essere molto pericolosi durante l'interazione con i pazienti, soprattutto nelle applicazioni di fisioterapia. Questo non è un problema con Harmony SHR, che è stato progettato per essere sensibile alla forza e controllato dalle forze applicate dai portatori invece che dai setpoint della posizione tipici di gran parte dei bracci robotizzati.
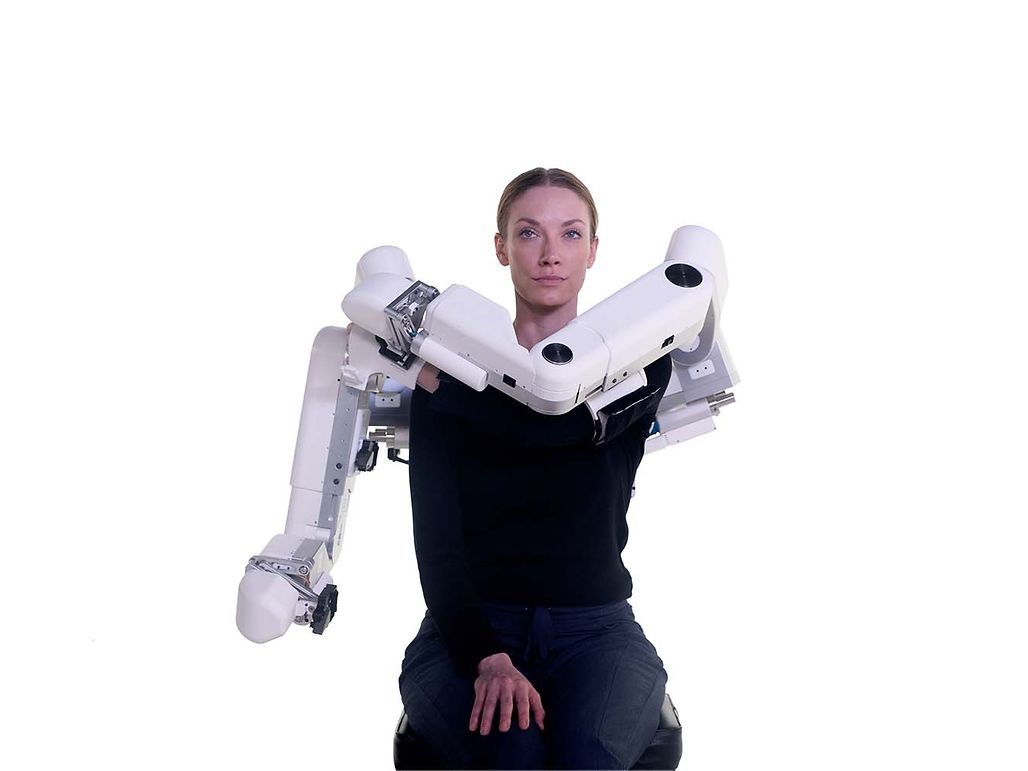
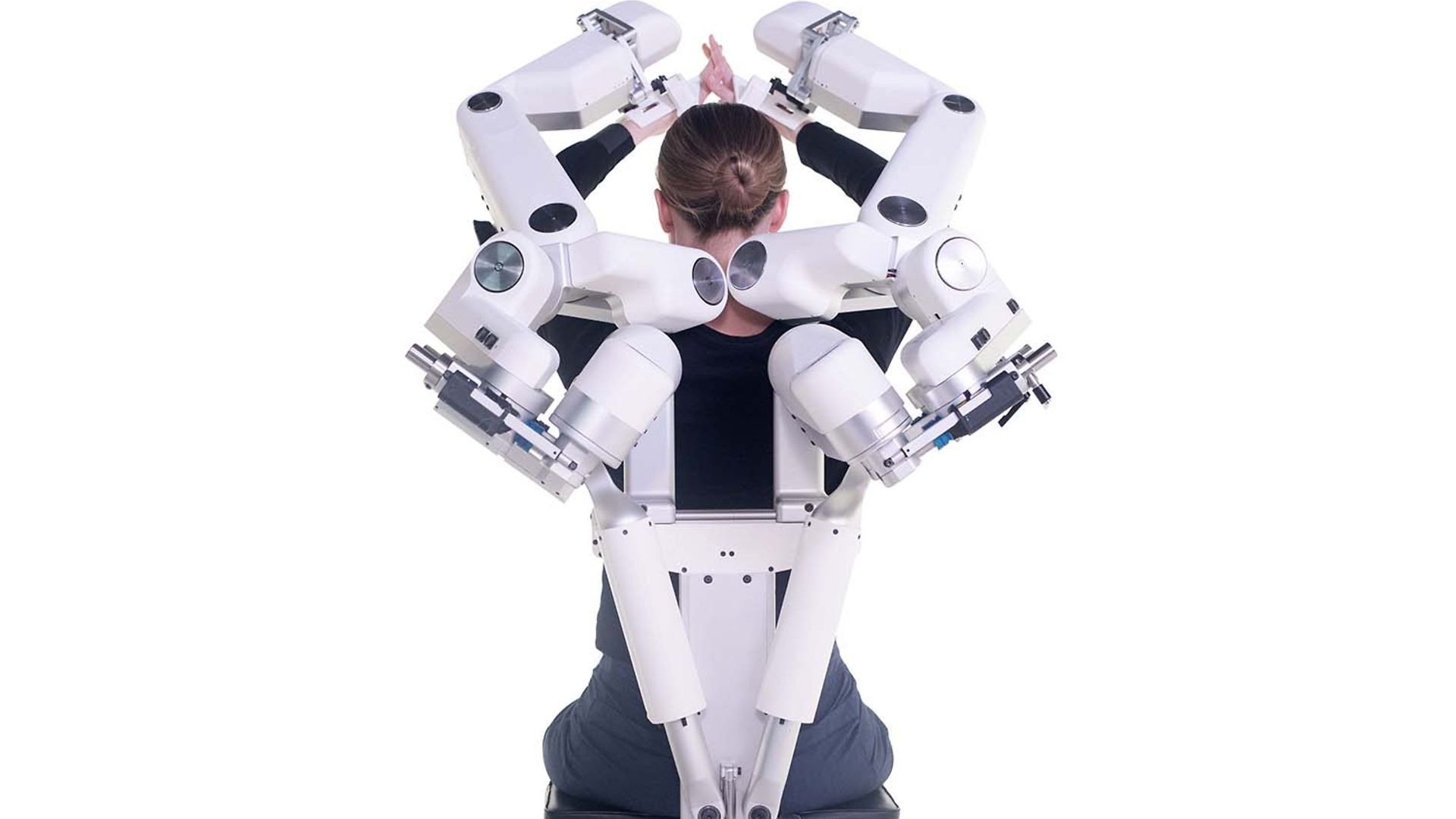
Figura 1: La precisione è meno importante per la riabilitazione, in particolare durante l'esercizio.
Per assistere i pazienti con gli esercizi è molto più importante che il robot applichi forze precise al paziente invece di un posizionamento preciso (vedere la figura 1). Il robot è stato progettato pensando alla conformità in modo che anche le piccole forze applicate al robot gli consentano di spostarsi, rallentare o arrestarsi completamente. Questa caratteristica rende l'esoscheletro robotizzato estremamente sicuro da utilizzare.
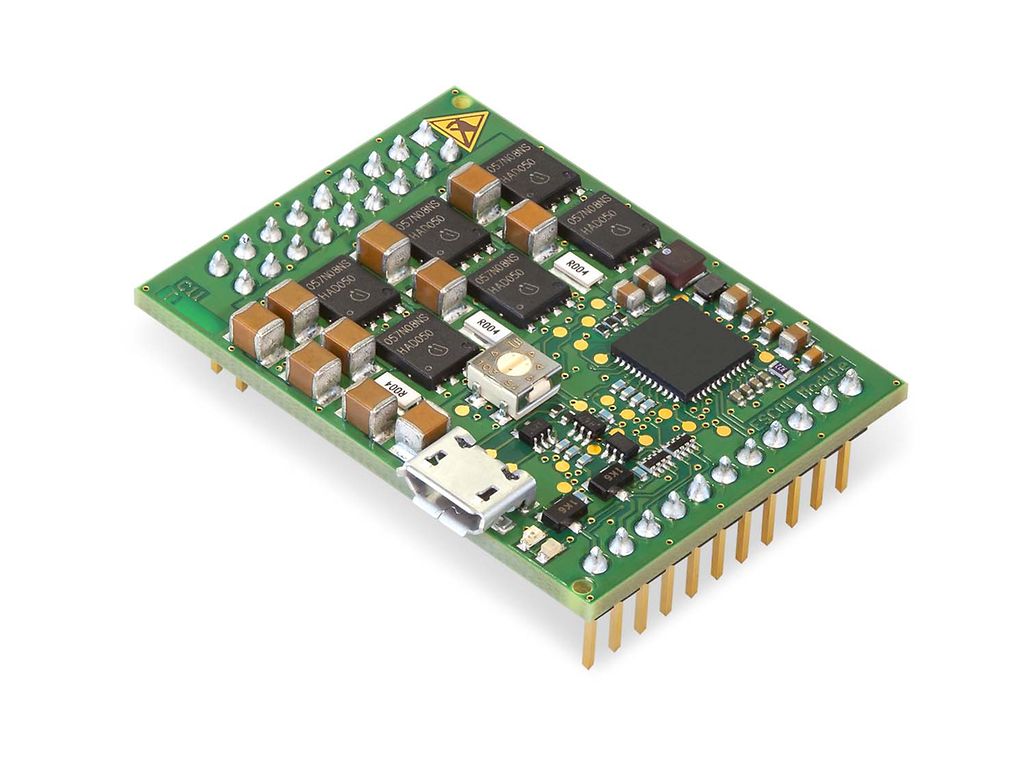
Figura 2: l'unità di comando ESCON di maxon ha dato un contributo compatto e potente all'esoscheletro Harmony SHR.
Questa sensibilità alla forza ha richiesto una riprogettazione dei tipici attuatori per robot. Harmonic Bionics ha sviluppato un attuatore per robot brevettato che utilizza una cella di carico meccanicamente isolata dai carichi estranei. Il risultato è che ogni cella di carico può percepire la forza esercitata solo dall'articolazione del robot su cui è montata massimizzando cosi la precisione di percezione della cella di carico. Le unità di comando ESCON prodotte da maxon erano di dimensioni compatte e facili da integrare dal punto di vista elettrico e fisico (vedere la figura 2). Abbiamo scoperto che il software era facile da utilizzare. I motori erano dotati di schede tecniche informative che ne semplificavano l'integrazione. Raramente abbiamo dovuto rivedere la scelta del motore perché le schede tecniche ci aiutano a scegliere il motore giusto sin dall'inizio.
Quelli utilizzati nell'esoscheletro Harmony SHR sono attuatori rotanti con una uscita di coppia e rilevazione dell'angolo per assistere il movimento del paziente oppure attuatori lineari con feedback di posizionamento per ridimensionare il robot adattandolo al paziente. L'esoscheletro è progettato per fornire una valutazione oggettiva delle capacità motorie del paziente. Il sistema comprende oltre 80 sensori che registrano le misurazioni 2.000 volte al secondo consentendo una misurazione precisa di molteplici parametri tra cui il range di movimento, la generazione di forze e il numero di ripetizioni.
Il sistema motorio utilizza diversi motori progettati e prodotti da maxon. maxon è riuscita a fornire motori che soddisfacessero un'ampia serie di particolari requisiti di sistema. Ad esempio, i motori EC Flat forniscono una elevata uscita di coppia necessaria in un prodotto compatto che si adatta alle dimensioni dell'esoscheletro (vedere la figura 3). È stato inoltre possibile equipaggiare i motori flat con sensori d'angolo.
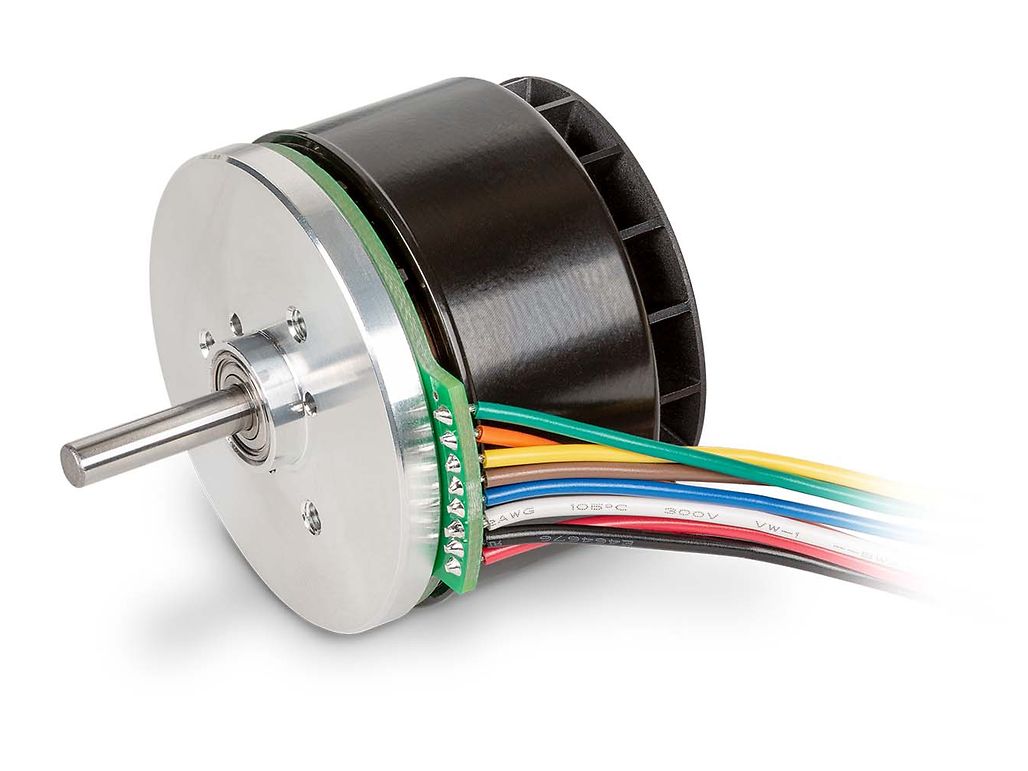
Figura 3: il motore maxon EC 60 Flat fornisce una coppia elevata all'interno di un pacchetto compatto.
È stato scelto un motore EC 60 Flat perché il diametro esterno era simile a quello dell'azionamento armonico e perché è assialmente compatto. L'albero di un motore maxon EC 60 DC Flat è collegato a un generatore di onde di un azionamento armonico con dimensione 17, scelto per le dimensioni assiali compatte e l'elevata capacità di coppia. I riduttori dell'azionamento armonico offrono riduzioni elevate, un gioco ridotto e una elevata capacità di coppia di cui l'azienda aveva bisogno per la progettazione.
Lo statore del motore maxon è montato sulla corona circolare dell'azionamento armonico. La coppa cilindrica dell'azionamento armonico è collegata all'albero di uscita sostenuta da un cuscinetto a rulli incrociati che supporta tutti i carichi diversi dall'uscita di coppia dell'attuatore. Poiché il cuscinetto a rulli incrociati supporta gli altri carichi, l'unico carico che agisce sul sensore di carico è l'uscita di coppia del sensore di carico.
Il motore maxon, l'albero di uscita e il gruppo dell'azionamento armonico sono liberi di ruotare nel cuscinetto a rulli incrociati. Una staffa è collegata alla corona circolare dell'azionamento armonico e allo statore del motore maxon. Un sensore di carico è collegato alla staffa in modo che la coppia di uscita dell'intero gruppo possa essere misurata dal sensore di carico.
L'allineamento dell'azionamento armonico all'albero del motore maxon è estremamente importante per la durata dell'attuatore. Anche un piccolo problema di allineamento può causare un'usura prematura o il guasto del meccanismo. I componenti lavorati vengono prodotti in modo che siano paralleli con una tolleranza di 20 micron mentre la concentricità viene mantenuta entro circa 30 micron per allineare la corona circolare al motore maxon. L'impronta generale degli attuatori all'interno del robot è di circa 80 mm di diametro e 90 mm di lunghezza. I componenti lavorati che vengono inseriti in ogni attuatore sono realizzati con diverse leghe di alluminio resistenti alla fatica e titanio grado 5 per rispondere alle sollecitazioni elevate.
La coppia di uscita dell'azionamento generale è di circa 30 Nm e l'azionamento può raggiungere un picco di oltre 100 Nm. L'azionamento è collegato a una cellula di carico estremamente sensibile che ha una risoluzione inferiore a 10 mNm. Ogni azionamento è progettato per avere una durata di oltre 3 milioni di giri.
Conclusioni
Gli attuatori utilizzati nell'Harmony SHR presentano un design evoluto e si prevede che non necessiteranno di molti miglioramenti in futuro. Secondo l'azienda, è improbabile che i componenti COTS verranno cambiati durante le prossime revisioni, in particolare i componenti maxon. I motori DC di maxon sono stati facilmente personalizzati, inoltre l'azienda ha offerto versioni con gioco ridotto dei riduttori da utilizzare negli attuatori rotanti oltre a combinazioni di un motore DC con spazzole di diametro ridotto + riduttore planetario per creare attuatori rotanti compatti. L'azienda ha inoltre fornito riduttori a vite senza fine da utilizzare in applicazioni con azionamenti lineari. Tutto questo per dire che maxon è stata in grado di fornire tutti i motori e le unità di comando necessarie per l'applicazione offrendo a Harmonic Bionics un unico fornitore affidabile.
Image Copyrights
Harmonic Bionics