Expert Blog
Scelta dell'encoder - Parte 1: caratteristiche

Come scegliere l'encoder giusto per la vostra applicazione? Nel nostro blog troverete alcune risposte.
L'encoder incrementale digitale è il sensore di feedback scelto per svariate applicazioni nelle quali sono utilizzati motori di piccoli dimensioni. Questa serie di post del blog inizia prendendo in rassegna le caratteristiche principali degli encoder prima di affrontare più nel dettaglio la selezione per il controllo di posizione e velocità.
Quali sono i requisiti tipici?
Ogni applicazione è differente. Il compito principale potrebbe essere il controllo di posizione o il controllo di velocità. Il livello di precisione del controllo di velocità o posizione può essere molto diverso e deve essere definito prima di selezionare l'encoder. Il controllo di velocità ridotte (inferiori a 100 rpm) necessita di un feedback migliore rispetto al controllo di velocità elevate (1000 rpm o superiori).
Il carico può essere accoppiato direttamente sul motore oppure potrebbe essere presente un sistema di trasformazione meccanica come, ad esempio, un riduttore, viti o altro. Solitamente gli encoder sono montati sull'albero del motore ma possono anche essere sull'albero stesso. Le caratteristiche meccaniche del meccanismo di trasformazione incidono sulla selezione dell'encoder: è invatti necessario considerare il rapporto di riduzione del riduttore e il gioco meccanico.
Anche le condizioni ambientali come, ad esempio, temperatura, vibrazioni, interferenze elettromagnetiche, possono incidere sulla selezione dell'encoder. Gli encoder ottici, ad esempio, dovrebbero essere protetti dalla polvere. Gli encoder magnetici possono essere sensibili ai campi magnetici esterni, compresi quelli del motore, e possono richiedere una schermatura.
Quali sono le caratteristiche chiave degli encoder incrementali?
Il parametro caratteristico degli encoder incrementali è il numero di impulsi rettangolari per giro motore. Solitamente sono presenti due canali che forniscono lo stesso numero di impulsi. I due segnali presentano uno sfalsamento di fase relativo di un quarto della lunghezza d'impulso. Questa disposizione permette il rilevamento della direzione della rotazione del motore e fornisce 4 stati distintivi per impulso. Questi stati si chiamano anche quadcount. Rappresentano la risoluzione reale che è 4 volte maggiore del numero di impulsi per canale. Un encoder con 1000 cpt (conteggi o impulsi per giro) fornisce 4000 stati per giro o una risoluzione nominale di 360°/4000 = 0,09°.
Nota: a proposito della risoluzione dell'encoder, evitiamo fraintendimenti: o si parla del numero di impulsi per canale (cpt) o del il numero di stati (i quadcount).
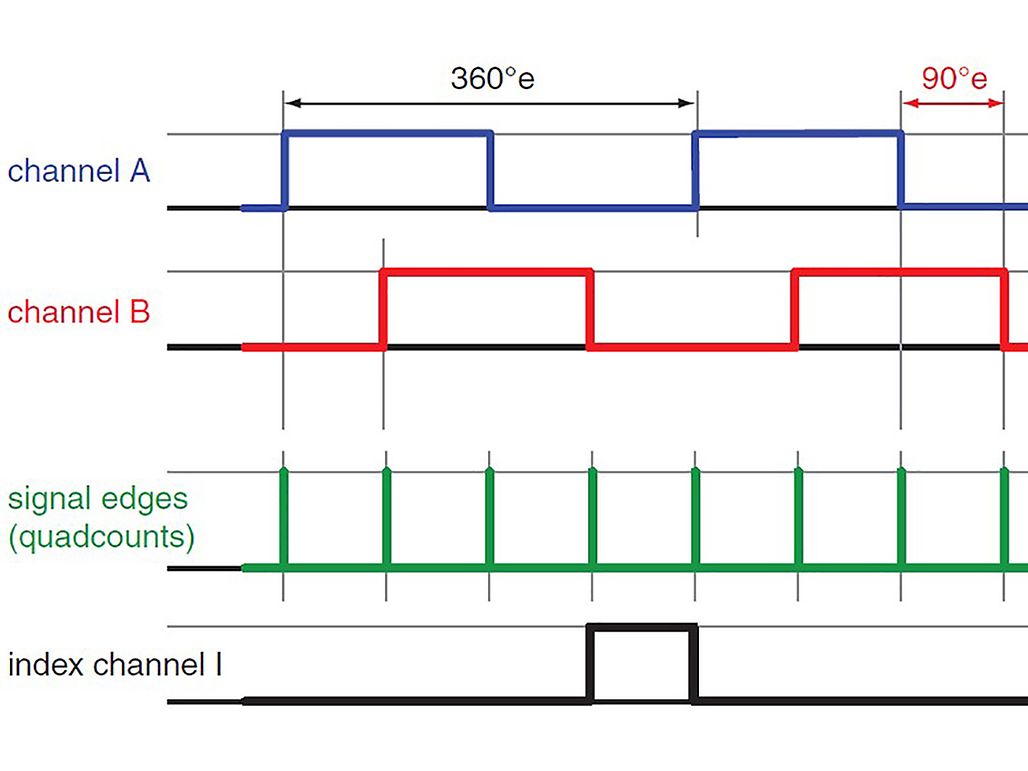
Segnali di un encoder incrementale digitale. Il conteggio dei cambi di stato (i fronti dei segnali dei canali A e B) comporta una risoluzione maggiore di 4 volte rispetto al numero di giri per canale encoder.
Il range della risoluzione dell'encoder è particolarmente ampio: da un encoder particolarmente semplice da 1 cpt (o 4 stati) utilizzabile semplicemente per rilevare il movimento fino a diverse decine di migliaia di cpt per un feedback estremamente preciso di posizione o velocità. Sono molti i fattori che incidono sulla risoluzione dell'encoder raggiungibile tra cui: il principio fisico di base (ottico, magnetico, induttivo), il tipo di segnale principale (analogico o digitale), il trattamento del segnale (ad esempio interpolazione) e la posa meccanica. Questo post non parla della progettazione dell'encoder, ma del modo in cui è possibile utilizzare encoder adatti per soddisfare i requisiti di controllo specifici.
Quanto sono precisi gli encoder?
La risoluzione, ovvero il numero di stati, indica la precisione nominale: la posizione viene rilevata con un errore di 1 stato. Tuttavia la lunghezza di impulso dell'encoder può cambiare a seguito delle tolleranze meccaniche (ad esempio disassamento dell'albero, lunghezza dei poli magnetici ecc.). Gli impulsi in un range pari al giro del motore possono essere minori degli impulsi in altri range. Di conseguenza, all'interno di un giro motore la posizione misurata si discosta periodicamente dalla posizione reale.
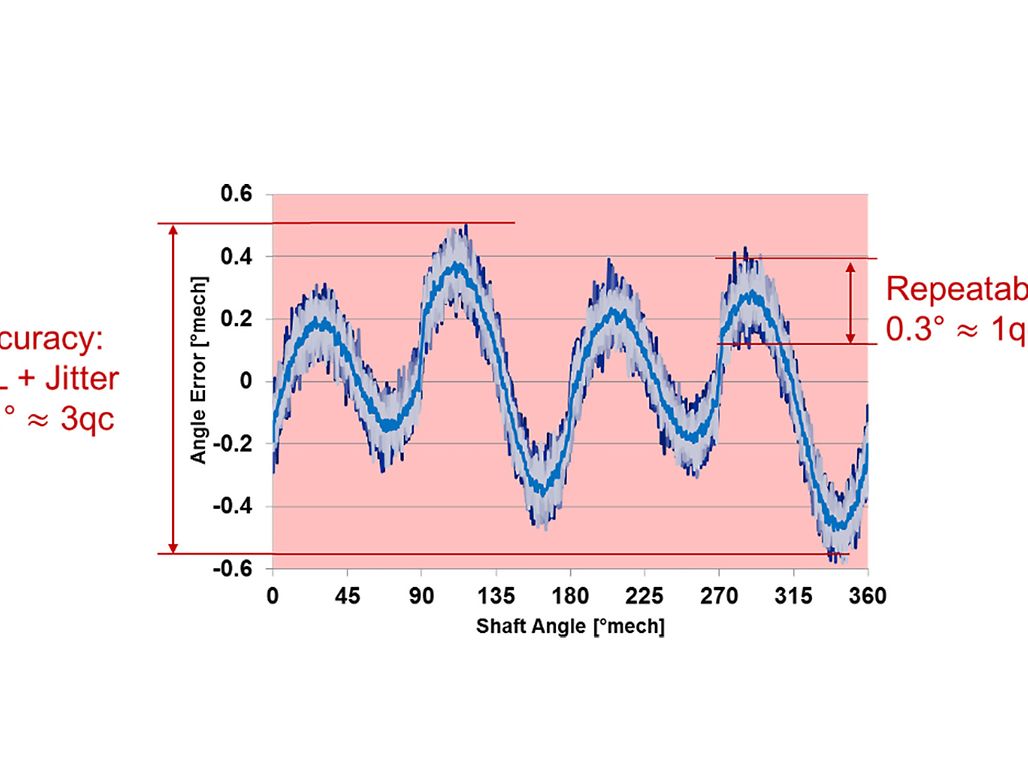
Esempio di non linearità misurata di un encoder con interpolazione magnetica con 256 cpt. La deviazione rispetto alla posizione perfetta viene mostrata come funzione del segnale encoder (1024 quadcount). Il diagramma è composto da 25 misure in 1 giro. È possibile vedere chiaramente la ripetizione della deviazione dopo un giro. La deviazione rispetto alla posizione assoluta media è di circa +/- 0,45° o, in termini di INL, è pari a 0,9°. Con una posizione encoder definita, il rumore del segnale (jitter) e di circa 0,3°: ciò corrisponde circa a una variazione di 1 stato (360° / 1024 = 0.35°).
La deviazione massima (picco - picco) è chiamata "non linearità integrale" (INL, Integrated Non-Linearity). La deviazione INL è importante nelle applicazioni che necessitano di una precisione di posizione assoluta. L'INL non incide sulla ripetibilità, ovvero la possibilità di raggiungere sempre la stessa posizione per un dato valore nominale. La ripetibilità è dovuta piuttosto al jitter del segnale, che solitamente è inferiore a 1 stato.
Encoder incrementali e posizioni assolute?
Gli encoder incrementali indicano semplicemente i cambi di posizione. Per un posizionamento assoluto è necessario stabilire una posizione di riferimento o iniziale. Ciò è possibile spostando il meccanismo su un riferimento esterno, ad esempio un fermo meccanico o un interruttore di finecorsa.
Alcuni encoder dispongono di un terzo canale con un impulso/giro. I fronti di questo canale indice forniscono riferimenti di posizione assoluti in un giro. La precisione limitata dei riferimenti esterni può essere migliorata con uno spostamento aggiuntivo verso uno dei fronti del canale indice. Ricordiamo però che il canale indice non è un prerequisito per il posizionamento. Infatti i costruttori di macchinari cercano il più possibile di evitare l'indice per la referenziazione perché necessita di una nuova calibrazione in caso di sostituzione dell'unità motore-encoder. Inoltre alcune unità di comando utilizzano il canale indice per un controllo incrociato del segnale encoder e sorvegliare i conteggi encoder per giro.
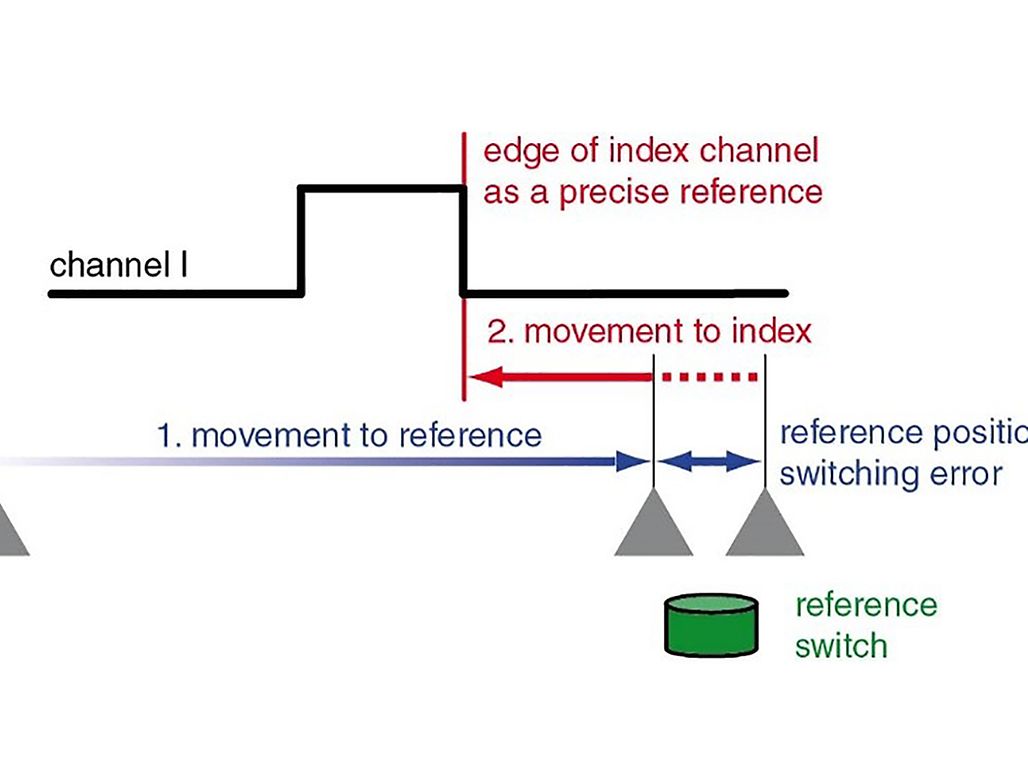
Miglioramento della precisione della posizione di riferimento con lo spostamento fino al fronte del segnale del canale indice.
Cosa considerare la trasmissione del segnale?
I line driver sono raccomandati per la trasmissione sulle lunghe distanze e una migliore qualità del segnale. Per il posizionamento i line driver sono praticamente un must per contare tutti gli impulsi dell'encoder.
I line driver generano segnali invertiti (Ā, B̄, Ī) per ciascun canale (A, B, I). I segnali vengono trasmessi a coppie e viene analizzata la differenza, filtrando così eventuali interferenze elettromagnetiche durante la trasmissione dei segnali. Un vantaggio annesso è il miglioramento della qualità del segnale: i fronti dei segnali sono definiti più chiaramente, il driver permette la trasmissione del segnale su lunghe distanze (fino a circa 30 m).
Gli encoder necessitano di tensione di alimentazione minima. Sulle linee encoder lunghe, la resistenza di linea e il calo di tensione corrispondente potrebbero essere un problema. Controllate quindi la sezione dei cavi e la tensione di alimentazione.
Condizioni ambientali e resistenza
La gamma di temperature operative standard degli encoder è compresa tra -30 °C e +100 °C. Questa gamma copre la maggior parte delle applicazioni e il calore sviluppato dal motore.
In applicazioni soggette a forti vibrazioni e urti meccanici è importante disporre di un alloggiamento meccanico robusto e un buono scarico della trazione dei cavi.
Mentre gli encoder ottici sono meno sensibili alle interferenze elettromagnetiche, gli encoder magnetici necessitano di una buona schermatura dai campi di dispersione. Se gli alloggiamenti non sono ben chiusi e a tenuta, la polvere può interferire sul funzionamento degli encoder ottici.
Nei prossimi post vorrei affrontare più nel dettaglio la selezione degli encoder per il posizionamento e il controllo della velocità.