maxon Story
Quando scegliere un motore DC 4pole


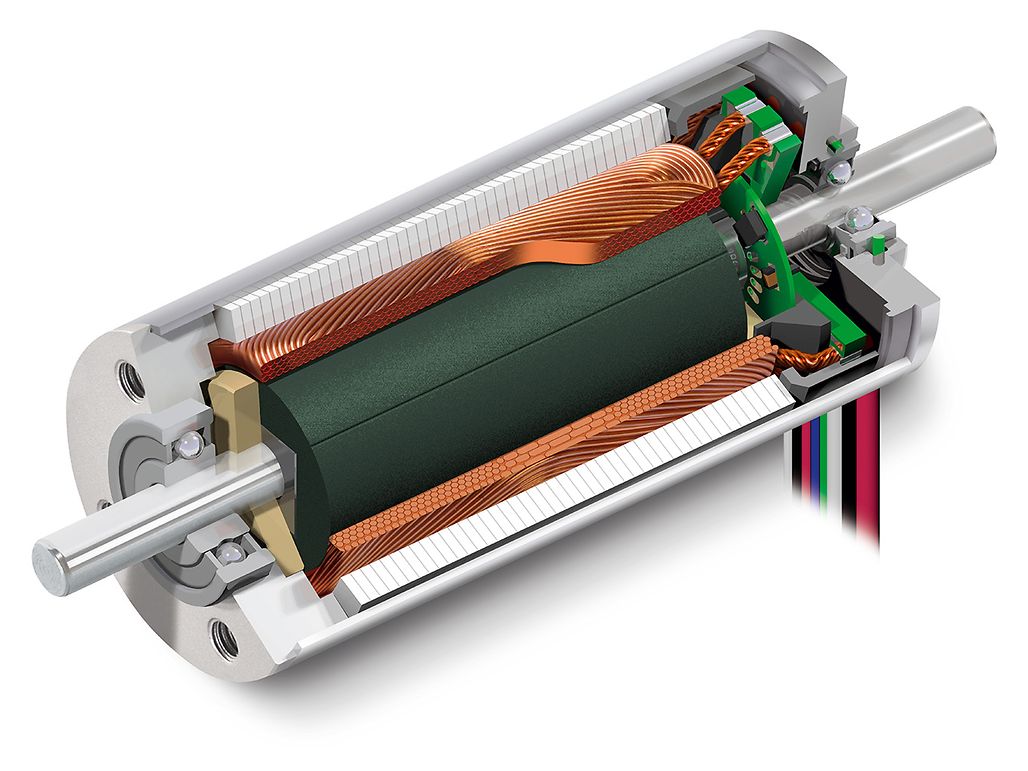
Nella scelta di un micromotore DC per l'uso in svariate applicazioni, dal settore aerospaziale all'ispezione dei fori down-hole, i motori 4pole presentano vantaggi indiscussi. La struttura dei 4pole è più potente di quella dei corrispettivi 2pole a fronte di dimensioni e peso uguali, come spiega Greg Dutfield di maxon UK.
Per le applicazioni con motori DC che richiedono una coppia elevata con un peso ridotto e un involucro compatto, i motori 4pole possono essere un'ottima scelta. Un motore 4pole può essere installato nello stesso spazio di un 2pole ma è in grado di generare una coppia maggiore. Inoltre un motore 4pole è più potente di un motore 2pole di uguali dimensioni: ciò significa che è in grado di mantenere maggiormente la propria velocità quando viene applicato un carico.
Spiegazione del numero di poli - velocità
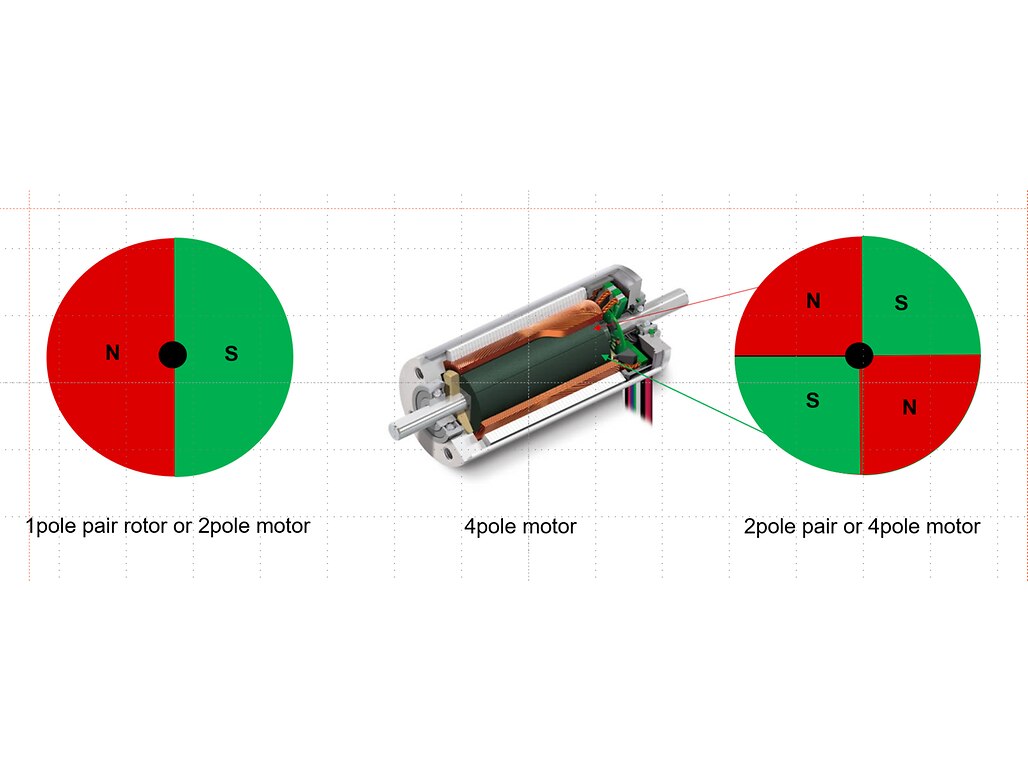
Il conteggio dei poli si riferisce al numero di coppie di magneti permanenti all'interno di un motore. I motori 2pole hanno una sola coppia di magneti in direzione opposta (a nord e a sud). Quando viene applicata corrente si genera un campo magnetico tra la coppia di poli magnetici e il rotore gira. Le configurazioni dei motori comprendono quindi il 4pole che è dotato di due coppie di poli dei magneti fino al design a più poli che comprende il modello 12pole.
Il numero di poli è un aspetto significativo del design del motore perché influisce sulle caratteristiche di velocità e coppia del motore. Minore è il numero di poli, maggiore è la velocità del motore. Ciò è dovuto al fatto che ogni rivoluzione meccanica del rotore dipende dal completamento del ciclo del campo magnetico di ogni coppia di poli. Maggiore è il numero di coppie di magneti permanenti del motore, maggiore è il numero di cicli dei campi magnetici necessario, di conseguenza il rotore impiega più tempo per completare un giro di 360°. La velocità viene divisa per il numero di coppie di poli a una frequenza fissa, quindi prendendo come base un motore 2pole da 10.000 rpm, un motore 4pole genererebbe 5.000 rpm, un motore a sei poli funzionerebbe a 3.300 rpm e così via.
Spiegazione del conteggio dei poli - coppia
Indipendentemente dal conteggio dei poli, un motore più grande può generare una coppia maggiore. Tuttavia, confrontando motori con lo stesso volume, l'aumento del numero di poli consente di generare coppie maggiori. Considerando un motore 4pole, la coppia viene notevolmente avanzata in quanto il design compatto presenta un percorso di ritorno magnetico più sottile: in questo modo è disponibile più spazio per una doppia coppia di poli di magneti permanenti e, nel caso dei motori maxon, un avvolgimento a maglie brevettato più spesso.
Mentre un motore 4pole può essere installato nello stesso spazio di uno 2pole, è bene ricordare che aumentando il numero dei poli da sei a 12 poli, le dimensioni del telaio e la massa devono aumentare di conseguenza per alloggiare il rame, ferro e magneti aggiuntivi necessari.
Il motori EC 4pole di maxon mantengono la velocità in presenza di carichi elevati.
I motori 4pole sono più potenti
La forza di un motore viene in genere definita dal gradiente velocità/coppia, ciò significa che un motore più potente è maggiormente in grado di mantenere la propria velocità in presenza di un carico. Il gradiente velocità/coppia viene misurato dalla riduzione in velocità per ogni 1mNm di carico. Quanto più basso è il numero e il gradiente, tanto meglio il motore è in grado di mantenere la propria velocità sotto carico.
È possibile ottenere un motore più potente con le stesse caratteristiche progettuali che permettono anche una coppia maggiore, come ad esempio un maggior avvolgimento utilizzando materiali di altissima qualità nella fase di produzione. Per questo motivo la struttura di un motore 4pole è più potente di quella di un motore 2pole a fronte delle stesse dimensioni del telaio.
Ad esempio, un motore 4pole da 22 mm di maxon presenta un gradiente velocità/coppia di 19,4 rpm/mNm, ciò significa che per ogni 1 mNm applicato registra una perdita di velocità di soli 19,4 rpm, mentre un motore 2pole di maxon con le stesse dimensioni del telaio ha un gradiente velocità/coppia di 110 rpm/mNm. Non tutti i produttori di motori soddisfano le specifiche di design e materiali di maxon quindi il gradiente velocità/coppia di un motore 2pole di un'altra marca potrebbe essere superiore e quindi essere più debole.
Quando è necessario usare un motore 4pole?
Le applicazioni del settore aerospaziale traggono vantaggio dal peso ridotto e dalla maggiore forza dei motori 4pole. Queste caratteristiche sono inoltre necessarie per utensili elettrici portatili che spesso necessitano di una coppia maggiore di quella fornita da un motore 2pole mantenendo al contempo peso e dimensioni ridotte.
Le caratteristiche di un motore 4pole sono inoltre importanti per i produttori di robot mobili. Durante le ispezioni di pipeline di petrolio e gas o nella ricerca di vittime di terremoti intrappolate, i robot su ruote o cingoli devono affrontare terreni accidentati, ostacoli e pendii ripidi. I motori 4pole forniscono la coppia e la forza necessaria per superare questi carichi consentendo al contempo ai produttori di realizzare robot mobili dal design compatto e leggero.
Le piccole dimensioni abbinate a un basso gradiente velocità/coppia sono inoltre fondamentali per l'ispezione dei fori down-hole nel settore di gas e petrolio. Per questa applicazione un motore 2pole compatto non sarebbe sufficientemente robusto mentre un motore a poli multipli sarebbe troppo grande per la zona di ispezione della punta di perforazione, pertanto maxon ha appositamente progettato un motore 4pole da 32 mm.
Ottimizzazione di un motore 4pole
Molte applicazioni adatte per l'impiego dei motori 4pole si svolgono in ambienti estremi o in condizioni che richiedono la capacità di operare a temperature, pressioni e vibrazioni elevate. Ad esempio, i motori per l'ispezione down-hole potrebbero dover funzionare a temperature superiori a 200°C, mentre quelli installati nei veicoli sottomarini autonomi (AUV) sono collocati in alloggiamenti riempiti con olio in grado di resistere ad altissime temperature a profondità di 6.000 m. Specificando caratteristiche di progettazione aggiuntive come manicotti e tecniche per ottimizzare la dissipazione di calore, i motori 4pole compatti possono gestire condizioni operative estreme sul lungo termine.
Mentre la specifica del motore è fondamentale per l'ottimizzazione dell'applicazione, si deve considerare la progettazione dell'intero sistema di azionamento che comprende riduttori, encoder, azionamenti e comandi. Oltre a fornire consulenza sulle specifiche del motore, gli ingegneri maxon possono collaborare con un team di progettazione OEM per sviluppare un sistema di azionamento completo specifico per i requisiti dell'applicazione.



EC 4pole 22 + GP24
Se avete bisogno di parlare dei requisiti della vostra applicazione contattate Greg Dutfield, Industrial & E-Mobility Sales Engineer maxon UK al numero 01189 733337 o alla mail greg.dutfield@maxongroup.com