Young Engineers Program
L'apripista dei robot volanti

Nell'ambito di un progetto del politecnico ETH di Zurigo, otto studenti hanno costruito un manipolatore volante in grado di librarsi in qualsiasi direzione e afferrare oggetti. Il drone è molto più maneggevole di un quadricottero ed è stato progettato allo scopo di portare la robotica aera a un livello superiore.
Un magazzino dove i robot volanti provvedono al trasporto di pacchi. Molti inventori hanno provato a trasformare in realtà questa visione futura dell'intralogistica dotando i quadricotteri di bracci prensili seriali. Tuttavia, queste combinazioni di drone con braccio sono deboli e il braccio sporgente causa una sfavorevole distribuzione del peso che influisce sia sulla precisione che sulla capacità di carico. Inoltre i quadricotteri possono ruotare solo sul piano orizzontale, ciò significa che il cosiddetto effettore finale, in questo caso la pinza, non possa muoversi in tutte le direzioni. Attualmente la maggior parte dei droni si limita ad attività di ispezione.
Lo scorso autunno, un team di studenti di ingegneria meccanica e di ingegneria di processo del politecnico ETH di Zurigo, hanno avuto l'idea di sviluppare un robot volante integrato che non presenti questi limiti. I giovani ingegneri hanno affrontato il progetto, appaltato da Autonomous Systems Lab (ASL), e hanno creato un manipolatore volante omnidirezionale, in altre parole un dispositivo in grado di interagire fisicamente con l'ambiente circostante.

Ispirato da una stampante 3D
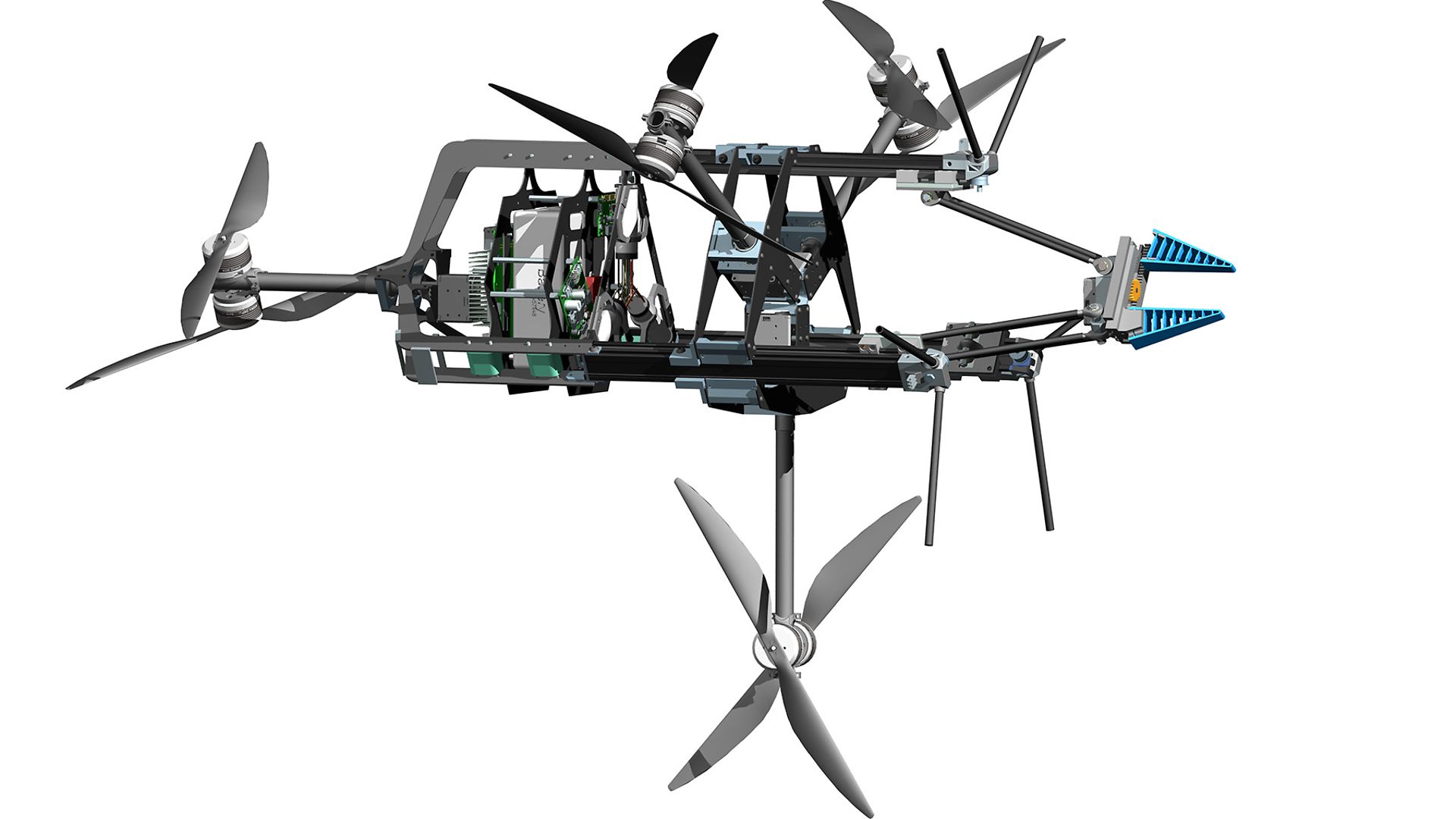
Per creare un effettore finale altamente preciso, gli studenti hanno installato un braccio parallelo lineare, posizionato utilizzando tre guide che si spostano all'interno di una struttura prismatica. I giovani innovatori hanno dotato il Prismav (Prism Micro Aerial Vehicle) di quattro azionamenti con allineamenti diversi, ciascuno formato da due propulsori rotanti in direzioni opposte. Questo compensa il movimento dei singoli propulsori e assicura un comportamento stabile in volo.
L'ispirazione del braccio delta è nata dall'interno di una stampante 3D. Matthias Rubio, studente di ingegneria meccanica, spiega: “Eravamo in piedi davanti a una stampante 3D e c'è venuta l'idea di utilizzare la struttura interna della stampante per costruire una piattaforma volante che combinasse volo e manipolazione.” Si tratta di un nuovo approccio in quanto questo tipo di braccio delta è ancora raro nei manipolatori volanti.
Il braccio parallelo compensa gli errori di posizionamento
I gruppi del rotore possono ruotare sul proprio asse. Ciò consente all'oggetto volante di 7,5 kg di librarsi in qualsiasi direzione. Durante il progetto, il drone omnidirezionale è stato utilizzato in una stanza dotata di un sistema di tracciamento visivo dei movimenti in grado di eseguire misurazioni precise di posizione e allineamento. Ciò ha permesso a Prismav di interagire con l'ambiente circostante e posizionare la pinza in modo preciso. Due batterie con una capacità di 20.000 mAh assicurano un'autonomia di volo di circa 12 minuti.

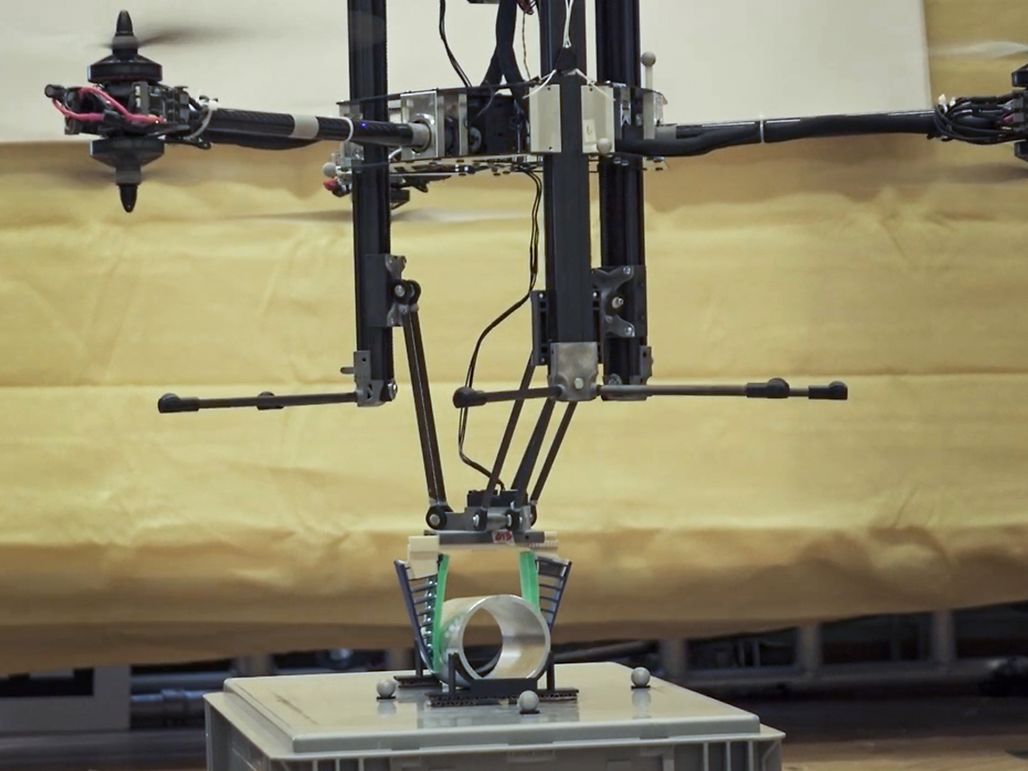
Gli otto studenti (sette in ingegneria meccanica e uno in ingegneria elettrica) del team Griffin festeggiano dopo il successo del trasporto in volo di un cilindro di 500 g.
L'imprecisione residua nelle manovre di volo è solitamente compresa tra 10 e 15 centimetri. Per compensare questi valori, tre motori maxon senza spazzole provvedono a un posizionamento preciso del braccio prensile. Una cinghia dentata posiziona ciascuno dei tre carrelli che si spostano su guide lineari. Con questo sistema la pinza riesce a raggiungere qualsiasi posizione entro lo spazio 3D contrassegnato. Per risparmiare peso senza compromettere la forza, il team ha scelto gli azionamenti compatti ECX TORQUE 22 M.
Per aree pericolose o inaccessibili
Con Prismav gli studenti hanno posto le basi per la ricerca futura. Matthias Rubio aggiunge: “Abbiamo dimostrato che un manipolatore volante può afferrare, trasportare e deporre un cilindro di 500 g interagendo con l'ambiente circostante.” Il punto chiave è che il braccio prensile compensa gli errori di posizionamento con maggiore velocità rispetto ai movimenti del drone.
Il progetto presentato nel 2021 ha riscosso enorme interesse. Quindi gli studenti continuano a lavorare allo sviluppo di Prismav nei propri progetti di laurea, stanno infatti ottimizzando il posizionamento automatizzato, il calcolo del percorso di volo, il software di controllo e integrando un'unità di comando intuitiva. Tutto questo è molto utile in quanto il potenziale delle applicazioni è immenso. Ad esempio, in futuro i robot volanti potrebbero intervenire nella aree inaccessibili o pericolose: serrare viti, montare scaffali, riparare linee dell'alta tensione o persino creare strutture di protezione antivalanghe.