Expert Blog
Controllo senza sensori dei motori brushless


Per molte applicazioni sarebbe ottimale l'impiego di motori brushless senza sensori. Sono molte le possibilità per far sì che tutto ciò sia possibile. Un metodo sviluppato da maxon definisce ora nuovi standard di precisione e affidabilità.
L'azionamento di un motore brushless necessita di elettronica di comando per la commutazione precisa. Tuttavia, ciò è possibile solo se l'elettronica di comando "conosce" sempre la posizione esatta del rotore. Solitamente questa informazione viene fornita dai sensori, ad esempio sensori Hall, installati all'interno del motore. È possibile però procedere diversamente. I metodi di comando senza sensore impiegano informazioni su corrente e tensione provenienti dal motore per determinare la posizione del rotore. Le informazioni sulla velocità del motore possono essere ottenute dal cambio di posizione del rotore e utilizzate per il controllo della velocità. I metodi di comando sensorless più avanzati sono addirittura in grado di controllare corrente (coppia) e posizione. Il mancato utilizzo di sensori comporta numerosi vantaggi, tra cui costi minori e ingombro ridotto, dato che non sono necessari cavi, connettori e circuiti elettronici sensibili.
Le unità di comando senza sensori di maxon impiegano tre principi base adattati specificamente ai motori BLDC maxon.
Principio 1: Metodo EMF con zero crossing
Il metodo EMF con determinazione zero crossing impiega la tensione indotta (o EMF) nella fase non alimentata elettricamente durante la commutazione a blocchi. Lo zero crossing avviene a metà dell'intervallo di commutazione (fig. 1). Il ritardo temporale fino al punto di commutazione successivo può essere stimato partendo dalle fasi di commutazione precedenti.
Il metodo EMF con zero crossing si applica soltanto quando la velocità è sufficientemente alta, perché la tensione indotta è pari a zero a motore fermo. L'avvio del motore necessita di un processo speciale simile al controllo passo-passo, e deve essere configurato a parte. La commutazione sensorless vera e propria è possibile solo a velocità del motore a partire da 500-1000 rpm. La frequenza delle fasi di commutazione viene impiegata per il controllo della velocità. Il feedback limitato vincola in un certo qual modo la dinamica del motore, che a sua volta può essere migliorata integrando metodi di stima nell'algoritmo di controllo (osservatore, filtro di Kalman, ecc.). Il metodo EMF con zero crossing presenta svariati vantaggi: è adatto per tutti i motori brushless, è robusto ed efficiente dal punto di vista dei costi. L'approccio viene impiegato in molti prodotti standard, come ad esempio l'ESCON Module 50/4 EC-S di maxon.
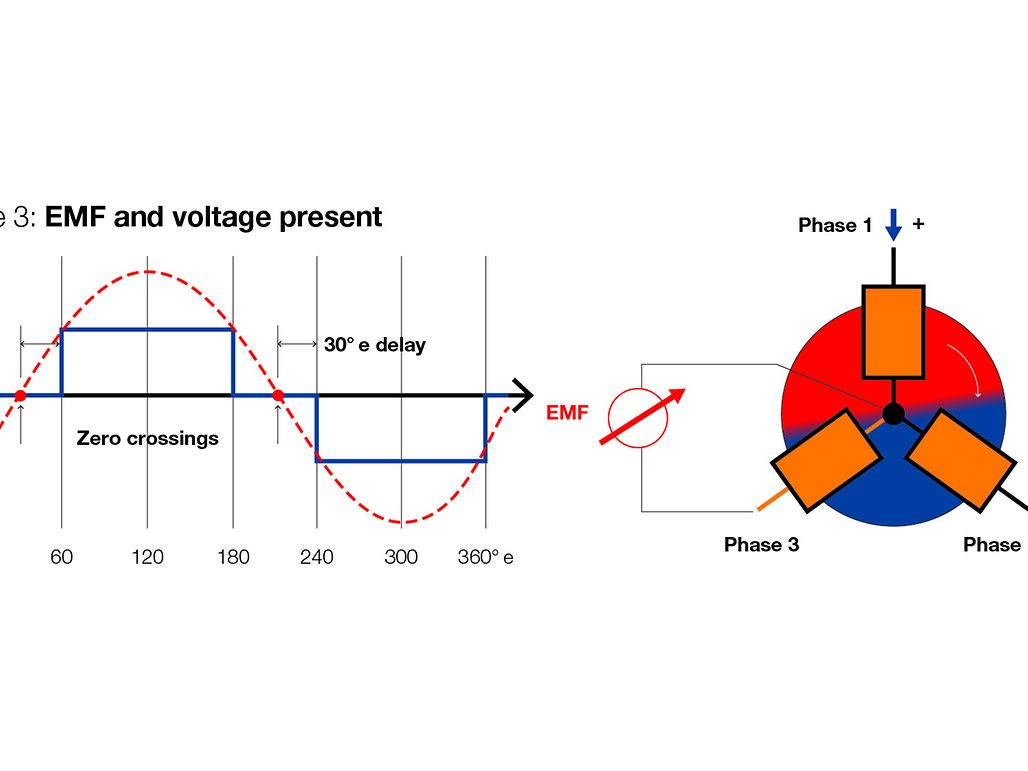
Fig. 1: Rappresentazione schematica della commutazione sensorless del metodo EMF con zero crossing; nell'esempio viene mostrata la fase 3.
Principio 2: Metodo EMF basato su osservatore
I metodi osservatore o EMF basati su modelli impiegano le informazioni relative alla corrente del motore per determinare la posizione del rotore e la velocità. L'approccio basato su modelli offre una risoluzione molto più elevata della posizione del rotore. Ciò consente la commutazione sinusoidale (o FOC, field-oriented control) con tutti i suoi vantaggi: maggiore efficienza, minore sviluppo di calore, minori vibrazioni e rumore. Tuttavia il metodo EMF basato su osservatore necessita anche di una velocità minima di diverse centinaia di rpm per funzionare correttamente.
Principio 3: Metodi basati sull'anisotropia magnetica
Nei metodi basati sull'anisotropia magnetica la posizione del rotore viene dedotta dall'induttanza del motore, che è minima quando i flussi magnetici di rotore e statore sono paralleli nel circuito di ritorno magnetico (fig. 2). La misurazione viene effettuata mediante brevi impulsi di corrente che non comportano il movimento del motore. A differenza dei metodi basati su EMF, questo metodo funziona anche a motore fermo o a bassissime velocità e consente la commutazione sinusoidale. I segnali misurati dipendono fortemente dal tipo di motore. La posizione del rotore viene determinata in un modello di motore che deve essere parametrizzato e adattato a ciascun motore. Le unità di comando che si basano sull'anisotropia magnetica sono pertanto prodotti estremamente specifici, non un'opzione "plug & play". Lo sforzo di calcolo necessario per analizzare la posizione del rotore limita la velocità massima.
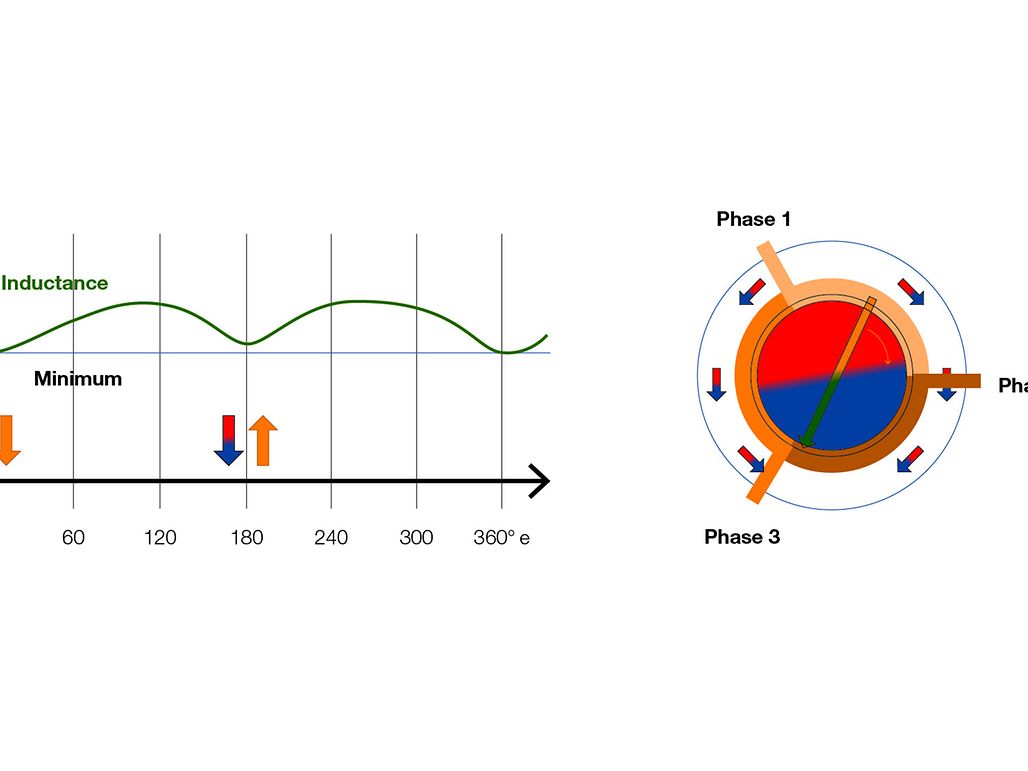
Fig. 2: Schema dell'anisotropia dell'induttanza. Mostra due valori minimi praticamente identici a una distanza di 180 gradi elettrici.
Perché il controllo sensorless?
Nelle applicazioni non propriamente economiche, l'impiego di motori senza sensori può contribuire a diminuire i costi. Sensori Hall, encoder, cavi e connettori diventano così superflui. Questo tipo di motori trova impiego in ventole, pompe, scanner, frese, torni, e altre applicazioni con rotazioni rapide e prestazioni di controllo relativamente modeste che non necessitano di un avvio fortemente controllato. In caso di quantitativi elevati è sensato utilizzare una versione customizzata dell'unità di comando basata su EMF.
Ottimizzazione dei costi per prestazioni ad alto controllo
Il risparmio economico non è l'unico motivo per cui si sceglie il controllo sensorless. Nelle applicazioni come ad esempio gli azionamenti delle porte o i sistemi di motorizzazione delle e-bike sono richieste prestazioni di controllo elevate. Un controllo motore senza strappi da fermo è importante, così come lo sono dinamica elevata e commutazione sinusoidale per evitare il rumore. Tutto ciò deve essere realizzato senza l'impiego di encoder costosi. Negli ultimi anni hanno preso sempre più piede unità di controllo sensorless di alta qualità, compreso il nuovissimo High Performance Sensorless Control di maxon (HPSC, vedi sotto). Tuttavia lo sforzo ingegneristico richiesto per adattare i parametri dei modelli può essere giustificato solo per quantitativi di pezzi sopra le centinaia.
Condizioni ambiente difficili
Il controllo sensorless potrebbe essere necessario in situazioni dove è necessario evitare l'impiego all'interno dei motori di elettronica dei sensori vulnerabile. Alcuni esempi: applicazioni con temperature ambiente estreme, pulizia e sterilizzazione nella tecnologia medicale, radiazioni ionizzanti nello spazio, impianti nucleari o ambito medico. Il minor numero di connettori del motore facilita anche l'installazione in spazi ridotti.
La qualità del controllo richiesto dipende dall'applicazione. Deve quindi essere deciso, a seconda del caso specifico, quale metodo sensorless è il più adatto. Ad esempio, negli strumenti odontoiatrici per trapanare e fresare sono richieste velocità elevate, mentre velocità minori e coppia controllata sono richieste ad esempio per l'applicazione di viti chirurgiche.
Conclusioni
Sono tre i motivi principali per cui si sceglie il controllo sensorless: risparmio economico, risparmio di spazio e uso in ambienti sfavorevoli per i sensori. Il metodo EMF con zero crossing viene particolarmente utilizzato nelle applicazioni costose con velocità elevate. Il controllo sensorless da fermo e a velocità basse richiede metodi più avanzati. Lo sforzo per l'implementazione è maggiore e comprende la modellazione e la parametrizzazione. In questo caso il risparmio economico è secondario. Il field-oriented control offre una maggiore efficienza, meno sviluppo di calore e meno livelli di vibrazioni e rumore. Tutti questi vantaggi risultano preziosi soprattutto negli strumenti medici manuali.

Controlli sensorless maxon
__HPSC Module 24/5 (High Performance Sensorless Control) è uno degli ultimi prodotti sviluppati da maxon, una piattaforma composta da hardware e software customizzato. HPSC è sempre una soluzione customizzata quindi non un prodotto a catalogo. Cosa rende questo sviluppo così speciale? In caso di motore fermo e a basse velocità viene utilizzata prima di tutto la tecnologia di controllo basata sull'anisotropia magnetica (principio 3). Quindi, con l'aumentare della velocità, si passa gradualmente a un metodo EMF basato su osservatore (principio 2). Il firmware del modulo viene customizzato per ogni sistema di azionamento. In una messa a punto speciale vengono regolati automaticamente oltre 120 parametri per ogni singolo motore. Un esempio dell'impiego dell'HPSC è lo strumento medico manuale recentemente sviluppato da maxon.
__ESCON Module 50/4 EC-S è l'unica unità di comando sensorless di maxon presente nel catalogo prodotti (commutazione a blocchi con metodo EMF e zero crossing). Sensorless Controller 24/1 è una valida alternativa ai motori EC più piccoli (fino a circa 10 mm di diametro). Tuttavia, non è presente né nel catalogo né nell'e-shop.