maxon Story
Quando escolher um motor DC de 4 polos


Ao selecionar um micromotor DC para a utilização em aplicações desde a aeroespacial até à inspeção de perfuração de fundo de poço, um motor de 4 polos tem as suas vantagens. Um design de 4 polos é mais potente do que um equivalente de 2 polos, mas adequa-se de igual forma dentro do mesmo limite de espaço e de peso. Greg Dutfield da maxon UK explica.
Para aplicações de motores DC que exigem um binário elevado num limite de espaço compacto e leve, os motores de 4 polos podem ser a escolha ideal. Um motor de 4 polos cabe nas mesmas dimensões que um design de 2 polos, mas consegue gerar um binário maior. É importante notar que um motor de 4 polos é também mais potente do que um motor de 2 polos de tamanho equivalente, o que significa que mantém de forma mais aproximada a sua velocidade quando é aplicada uma carga.
O número total de polos explicado — velocidade
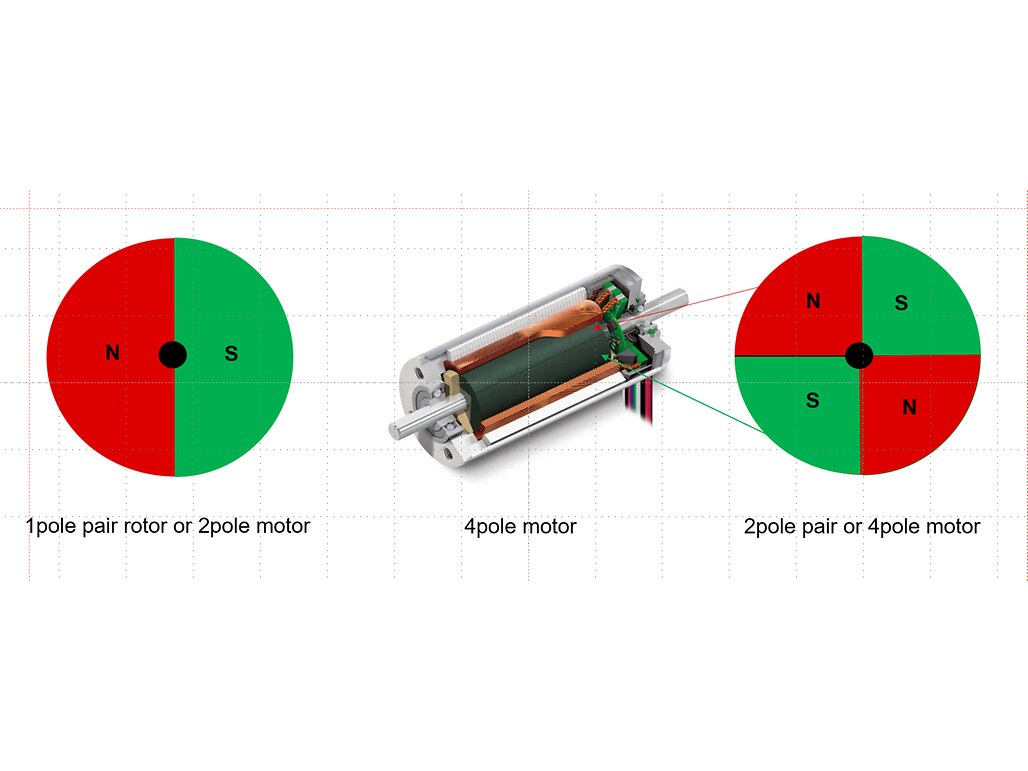
O número total de polos diz respeito ao número de pares de ímanes permanentes que existem dentro de um motor. Os motores de 2 polos têm um único par de ímanes em posições opostas: norte e sul. Quanto é aplicada corrente, é criado um campo magnético entre o par de polos de ímanes, forçando o rotor a rodar. As configurações do motor também incluem 4 polos, o que inclui desde dois pares ímanes de polos até designs multipolos, que incluem até 12 polos.
O número total de polos constitui um aspeto significativo do design do motor, porque tem impacto nas características de binário e de velocidade do mesmo. Quanto menor for o número de polos, maior será a velocidade do motor. Isto porque cada revolução mecânica do rotor depende da conclusão do ciclo do campo magnético de cada par de polos. Quanto mais pares de ímanes permanentes um motor tiver, mais ciclos de campo magnético serão necessários, o que significa que o rotor demora mais tempo a completar uma revolução de 360°. A velocidade é dividida pelo número de pares de polos a uma frequência fixa, por isso, considerando como base um motor de 2 polos de 10 000 rpm, um motor de 4 polos geraria 5000 rpm, um motor de 6 polos funcionaria a 3300 rpm e por aí em diante.
O número total de polos explicado — binário
Independentemente do número total de polos, um motor maior consegue gerar um binário superior. Contudo, comparando motores com o mesmo volume, o aumento do número de polos permite ao motor gerar um binário superior. Num motor de 4 polos, o respetivo binário aumenta consideravelmente porque o seu design compacto inclui um percurso de retorno magnético mais fino, proporcionando mais espaço para um polo de dois pares de ímanes permanentes e, no caso dos motores maxon, um enrolamento patenteado de malha com uma espessura maior.
Embora um motor de 4 polos possa caber dentro das mesmas dimensões que um design de 2 polos, é de notar que um maior número total de polos, de 6 a 12, significa que o volume e o tamanho da estrutura têm de aumentar em conformidade, de forma a acomodar cobre, ferro e ímanes adicionais necessários.
Os motores de 4 polos EC da maxon mantêm a sua velocidade sob cargas elevadas.
Os motores de 4 polos são mais potentes
A potência de um motor é normalmente definida pelo seu gradiente de binário/velocidade, o que significa que um motor mais potente consegue manter de forma mais aproximada a sua velocidade quando é aplicada uma carga. O gradiente de binário/velocidade é medido através da redução na velocidade para cada 1 mNm de carga. Quanto mais baixo for o valor e quanto mais reduzido for o gradiente, maior será a capacidade do motor de manter a sua velocidade sob carga.
Um motor mais potente é obtido a partir dos mesmos atributos de design, que também contribuem para o alcance de um binário superior, assim como um aumento no número de rolamentos e a utilização dos materiais ideais no respetivo fabrico. Por isso, o design de um motor de 4 polos é mais robusto do que o de um motor de 2 polos com um tamanho de estrutura equivalente.
Por exemplo, um motor maxon de 4 polos de 22 mm tem um gradiente de binário/velocidade de 19,4 rpm/mNm, o que significa que, por cada 1 mNm aplicado, o mesmo perde apenas 19,4 rpm, enquanto o motor maxon de 2 polos com o mesmo tamanho de estrutura tem um gradiente de binário/velocidade de 110 rpm/mNm. Nem todos os fabricantes de motores têm as mesmas especificações de materiais e de design da maxon, pelo que o gradiente de binário/velocidade de um motor de 2 polos de uma marca alternativa pode ser superior, traduzindo-se num motor menos potente.
Quando deve utilizar um motor de 4 polos?
As aplicações na indústria aeroespacial beneficiam do aumento da potência de um motor de 4 polos, aliado a um baixo peso. Estes atributos são necessários também para as ferramentas elétricas portáteis, que frequentemente necessitam de um binário superior àquele que um motor de 2 polos consegue fornecer, mantendo, contudo, um volume e design de tamanhos reduzidos.
As características do motor de 4 polos também são importantes para os fabricantes de robôs móveis. Quer seja na inspeção de oleodutos e gasodutos, ou na busca de vítimas de terramotos encurraladas, os robôs com rodas ou com lagartas têm de atravessar terrenos acidentados, obstáculos e inclinações íngremes. Os motores de 4 polos fornecem a potência e o binário necessários para superar estas cargas, ajudando, ao mesmo tempo, os fabricantes de robôs móveis a obter um design compacto e leve.
O pequeno tamanho, aliado a um baixo gradiente de binário/velocidade, são também essenciais para a inspeção de perfuração de fundo de poço no setor petrolífero e do gás. Para esta aplicação, um motor compacto de 2 polos não seria suficientemente robusto, enquanto um motor multipolos seria demasiado grande para caber no limite de espaço de inspeção da broca. Para resolver este problema, a maxon concebeu especificamente um motor de 32 mm de 4 polos.
Otimização de um motor de 4 polos
Muitas aplicações nas quais um motor de 4 polos é adequado têm lugar em condições ou ambientes extremos, exigindo a capacidade de operar sob altas temperaturas, pressões e vibrações. Por exemplo, os motores utilizados na inspeção de perfuração de fundo de poço podem ter de funcionar a temperaturas superiores a 200 °C, enquanto os instalados em veículos submarinos autónomos (AUVs) são instalados em caixas preenchidas com óleo, capazes de suportar as mais altas pressões a profundidades de até 6000 m. Especificando características de design adicionais, tais como mangas e técnicas para melhorar a dissipação de calor, os motores compactos de 4 polos conseguem suportar condições de operação extremas a longo prazo.
Embora a especificação do motor seja fundamental, a fim de otimizar uma aplicação, deve ser considerado o design do sistema de acionamento completo, incluindo caixas de redutores, codificadores, acionamentos e controlos. Para além de prestarem aconselhamento sobre as especificações dos motores, os engenheiros da maxon podem colaborar com uma equipa de design OEM a fim de desenvolver um sistema de acionamento completo específico para os requisitos da aplicação.



EC 4pole 22 + GP24
Para discutir os requisitos da sua aplicação, contacte Greg Dutfield, Engenheiro de Vendas Industriais e Mobilidade Elétrica, maxon UK, através do número 01189 733337 ou do endereço de e-mail greg.dutfield@maxongroup.com