maxon Story
Pinça inteligente para robôs colaborativos pequenos


Fornecer o motor certo para pequenos dispositivos de precisão pode ser um desafio.
Com o crescimento e a proliferação dos robôs colaborativos, tem-se intensificado a necessidade de uma grande variedade de pinças e de efetores terminais em geral. Uma das aplicações mais desafiantes é a avaliação e medição automatizada de peças pequenas. Este tipo de dispositivo tem de fornecer um posicionamento de alta resolução, com resoluções de níveis baixos, tais como 2,5 micrómetros, que possam estar continuamente disponíveis para o software de tomada de decisões em aplicações de automação. Foi por isso que a New Scale Robotics (NSR), uma divisão da New Scale Technologies, decidiu conceber e fabricar uma das suas mais recentes pinças.
Construída para os robôs colaborativos mais pequenos, a NSR-PG-10-20, Precision Parallel Gripper, consiste num sistema mecatrónico que integra, num único dispositivo, motor, sensores, guias de rolamentos de precisão, eletrónica de controlo e acionamento, juntamente com firmware incorporado para a automação. Durante o processo de design, a NSR decidiu que a pinça tinha de oferecer uma integração “plug-and-play”, que podia ser instalada em minutos à linha de Robótica Universal (UR) de cobôs pequenos. A NSR-PG-10-20 oferece aos utilizadores o menor tamanho e volume, com a máxima precisão. Todos os circuitos de potência e de controlo estão localizados através da porta da ferramenta do robô e anéis deslizantes, de modo que não sejam necessárias placas eletrónicas ou cabos externos. Para instalar a pinça, basta montá-la no flange da ferramenta do robô UR e ligar o cabo único à porta de E/S da ferramenta UR. Os comandos de movimento são recebidos através da interface de E/S da ferramenta de 8 pinos do robô. Não são necessários fios externos ou eletrónica separada, o que permite uma rotação completa de 360 graus ou infinita da articulação do pulso do robô UR sem interferência de cabos.

A Precision Parallel Gripper NSR-PG-10-20 incorpora o motor EC-20 plano da maxon para operações de alta precisão
A Precision Parallel Gripper incorpora um sensor interno de posição absoluta, especificamente para aplicações de metrologia automatizada, oferecendo alta precisão para a manipulação intrincada de pequenas peças, medição, classificação e montagem. As pinças tinham de proporcionar movimentos rápidos e precisos, repetidamente, durante um longo de ciclo de vida útil.
Controlo de movimento de precisão
Durante o processo de design, a NSR pesquisou as necessidades da sua Precision Parallel Gripper e selecionou o motor EC-20 plano sem escovas DC (BLDC), concebido e fabricado pela maxon. Este motor oferece até cinco tipos de enrolamento, assim como codificadores incorporados. Estão disponíveis várias potências de saída e os motores proporcionam elevada estabilidade e uma operação silenciosa. Os motores foram selecionados sobretudo devido à sua massa extremamente reduzida de apenas 15 gramas, bem como ao seu elevado binário contínuo de 3,75 mN-m. A excelente relação binário/massa dos motores significa que a NSR-PG-10-20 consegue alcançar uma força de preensão ajustável de ±3 a 10 N, utilizando uma modesta relação de engrenagem de 16:1. A pinça incorpora uma transmissão por correia dentada simétrica com um alcance de 20 mm. Além disso, a tensão, a corrente e o binário de operação combinaram na perfeição com a fonte de alimentação interna do robô.
O motor rotativo BLDC aciona a redução da engrenagem para uma correia dentada, que converte a rotação em movimento linear. Um sensor de ângulo separado é utilizado para medir o ângulo do veio do motor, enquanto a eletrónica digital separada é utilizada para gerar a corrente de acionamento trifásica necessária para a operação. Este mecanismo proporciona o movimento linear necessário para abrir e fechar os dedos das pinças utilizadas para agarrar e soltar peças pequenas. Os dedos da pinça conseguem agarrar por fora ou por dentro da peça, dependendo da aplicação. Através da utilização do sensor incorporado supramencionado, a resolução de medição da parte linear da pinça é de 2,5 micrómetros. A velocidade de abertura/fecho da pinça é de 20 mm/segundo e o alcance de abertura/fecho é de 20 mm.
De acordo com David Henderson, CEO da NSR, “As partes complexas do design consistiam em manter o tamanho pequeno, a altura e a massa reduzidas da pinça, fornecendo, ao mesmo tempo, a posição de circuito fechado e as características de velocidade. Foi também um desafio encontrar um motor de potência e corrente baixas que nos permitisse utilizar a energia interna do robô.” O EC-20 plano da maxon permitiu à NSR fornecer aos seus clientes o produto de que mais precisavam — e com a particularidade de ser fácil de instalar e operar. A integração mecânica foi a parte mais fácil. A empresa utilizou um EC-20 plano sem sensor de ângulo e, em vez disso, forneceu o seu próprio sensor de ângulo externo para a comutação. “No futuro, esperamos ampliar a nossa gama de produtos, de forma a incluir pinças com forças de preensão mais elevadas — e motores de potência e massa correspondentemente superiores — gamas de preensão mais elevadas e sensores de força incorporados, a fim de melhorar o controlo da força”, referiu o Sr. Henderson.
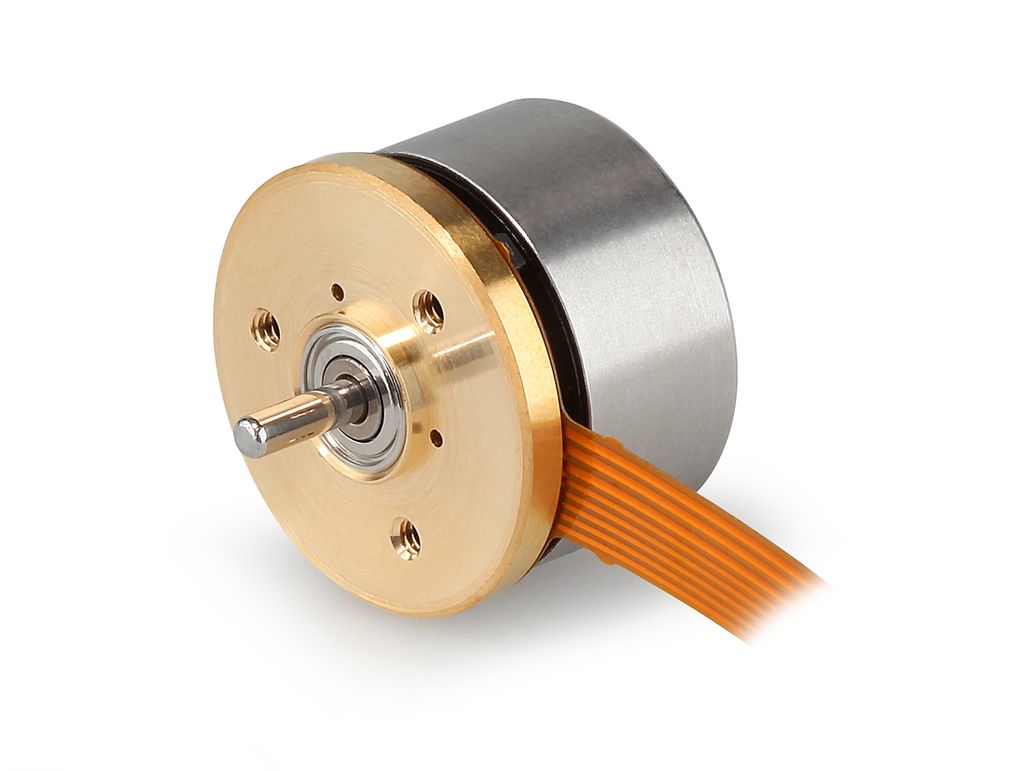
O EC-20 plano da maxon fornece ao motor de menor tamanho as capacidades de binário adequadas para lidar de forma melhor com os requisitos da NSR-GP-10-20 Precision Parallel Gripper
A pinça está equipada com dedos intercambiáveis. A NSR-PG expede o produto com dedos de fábrica instalados, para que os utilizadores possam trabalhar de imediato. A pinça também oferece posições de dedos programáveis quando utilizada com os robôs UR3, UR5, UR10 da Universal Robotics, bem como com a mais recente linha de robôs eSeries da empresa, os robôs UR3e, UR5e e UR10e. Mover manualmente os dedos para a posição desejada e configurá-los utilizando o pingente de programação — um processo familiar a qualquer pessoa que já tenha utilizado um robô UR no modo de programação. A posição é repetível em 0,01 mm. Ao configurar as posições de abertura e fecho dos dedos que correspondem à peça do utilizador, é permitido ao mesmo minimizar o movimento do dedo (curso) para cada operação, poupando tempo e energia. De forma geral, a NSR-PG-10-20 permite ao utilizador automatizar tarefas repetitivas e exaustivas de medição e de controlo de qualidade, de modo que o cobô UR se torne uma ferramenta potente para aplicações de metrologia.
Encontrar o motor certo para este tipo de aplicações específicas pode ser uma tarefa intimidante. A disponibilidade da mais recente tecnologia na unidade de motor mais pequena permitiu à NSR ir ao encontro das necessidades dos seus clientes. O EC-20 plano da maxon foi um componente essencial no design e fabrico da NSR-PG-10-20 Precision Parallel Gripper.
Para mais informações, visite: newscalerobotics.com