maxon Story
Fauna robótica

Em milhões de anos de evolução, a natureza produziu vários sistemas locomotores sofisticados que os engenheiros usam como inspiração para criar melhores robôs. Mostramos alguns desenvolvimentos técnicos atuais altamente avançados.
O pássaro biónico

Pode apenas ser um brinquedo, mas é tudo menos vulgar — o Bionic Bird (pássaro biónico) não só parece um pássaro, como também voa como um! Uma empresa francesa desenvolveu o Bionic Bird, que pode ser controlado com um smartphone. Este consegue atingir uma velocidade de até 20 km/h e tem um alcance de 100 m. Os responsáveis pelo seu desenvolvimento há muito sonhavam com um pássaro eletricamente acionado, mas foi apenas com o surgimento da microtecnologia da luz que foi possível concretizar esta visão. E agora o Bionic Bird, que pesa apenas 9 g, é uma alternativa fascinante aos habituais drones de hélice.
ANYmal
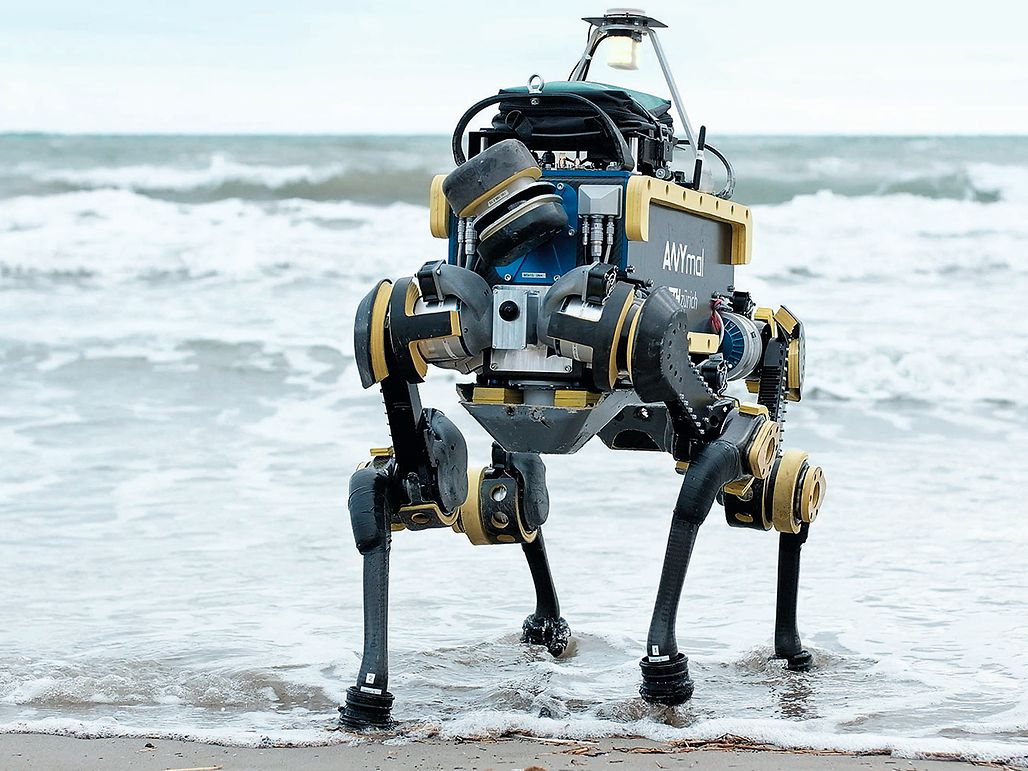
Em 2009, engenheiros do Laboratório de Sistemas Robóticos da ETH Zurich começaram a desenvolver um robô de quatro patas capaz de se mover autonomamente e que se destina a ser utilizado em condições adversas. ANYmal é agora capaz de correr, superar inclinações e até mesmo carregar no botão do elevador. Com sensores e câmaras laser, o robô cria continuamente um mapa do seu ambiente, sabe onde está e navega cuidadosamente pelo terreno. ANYmal pesa cerca de 30 kg, consegue transportar uma carga útil de até 10 kg e funciona durante duas horas com uma única carga de bateria. Está a ser distribuído e desenvolvido pela ANYbotics, spin-off da ETH. No futuro, o robô — capaz de correr, saltar e subir — poderá ser utilizado para inspeções, operações de resgaste ou no entretenimento.
A cobra submarina
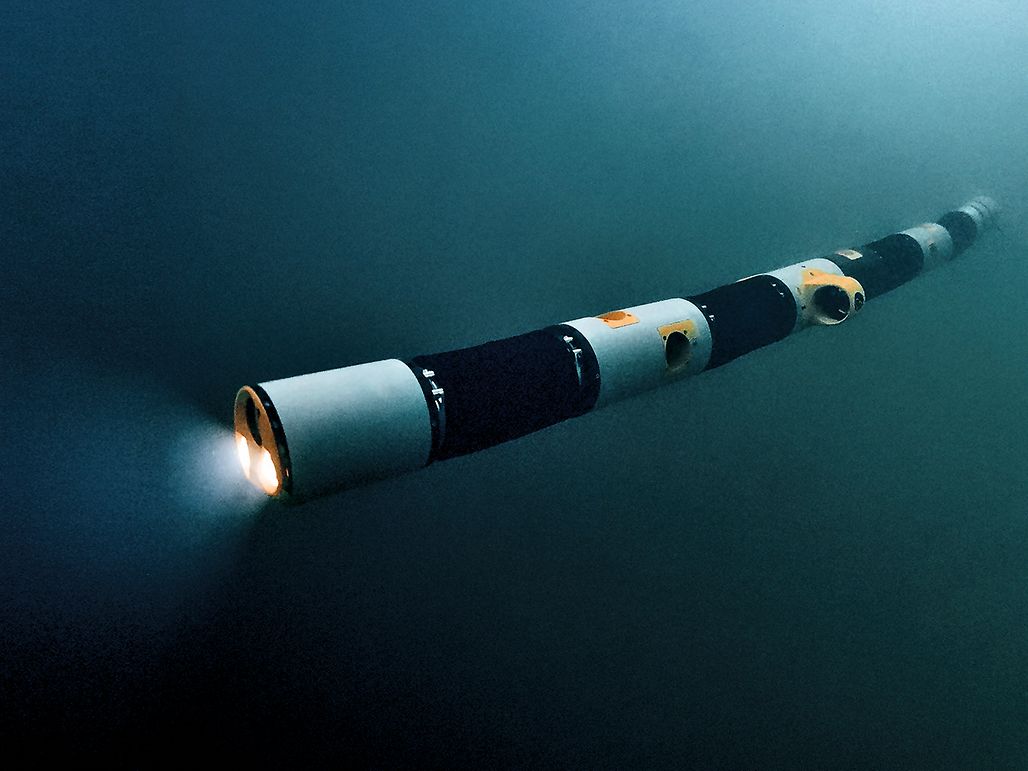
A start-up norueguesa Eelume desenvolveu um robô submarino modular com o formato de uma cobra, para ser utilizado em inspeções, manutenções e trabalhos de reparações. O corpo fino e flexível do robô consegue atravessar grandes distâncias e alcançar ainda lugares que não são acessíveis aos robôs submarinos convencionais. Os engenheiros têm vindo a trabalhar no robô cobra há dez anos e continuam a aperfeiçoá-lo. Os planos para o seu futuro incluem mantê-lo no fundo do oceano indefinidamente, numa estação de atracagem a partir de onde pode entrar em ação sempre que necessário. A cobra submarina continua atualmente dependente de um cabo. Mas já é flexível e as suas peças de ligação móveis tornam possível a utilização da cobra como braço robô, com ferramentas montadas. A maxon motor fornece motores DC sem escovas combinados com redutores personalizados para os módulos de conexão.
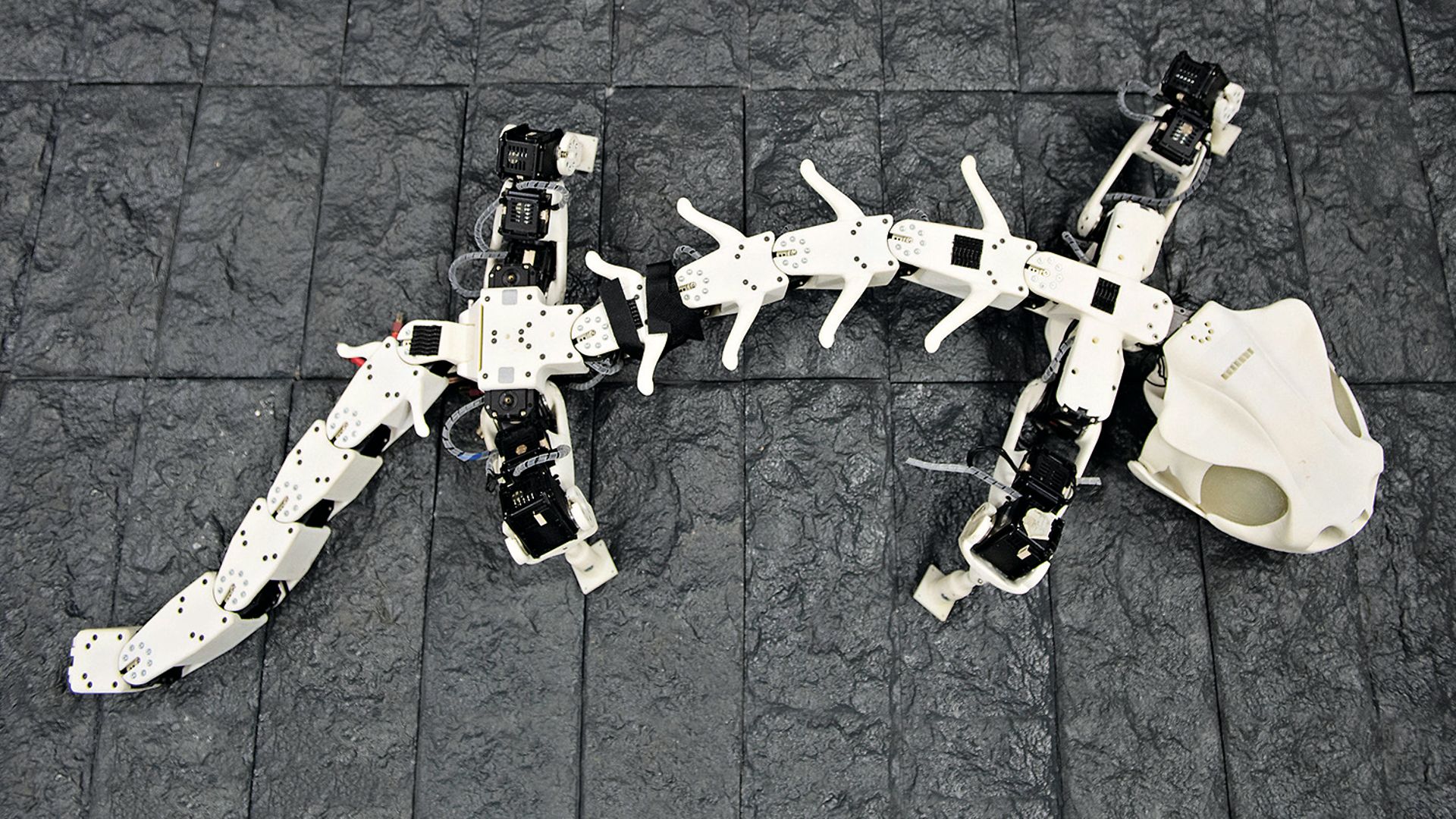
A cobra robótica
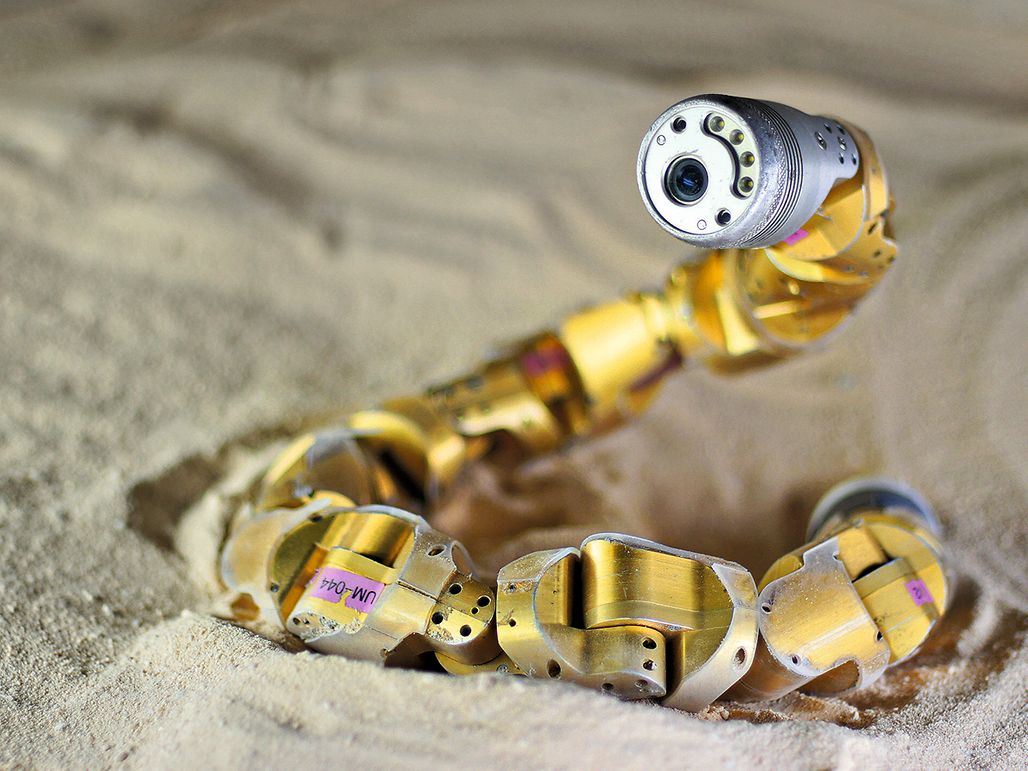
Este robô não só parece uma cobra, como também se desloca como uma. Os seus módulos independentes permitem que o SnakeBot suba pernas de calças e postes de iluminação. O seu pequeno diâmetro de 6 cm permite-lhe rastejar por entre fendas estreitas — por exemplo, após grandes terramotos. Foi desenvolvido pela Universidade de Carnegie Mellon, em Pittsburgh (EUA), e resultou na fundação da start-up HEBI Robotics. Os motores atuais incluem motores planos sem escovas EC-flat 20 da maxon. Estes acionamentos fornecem um elevado binário e conseguem suportar curtos períodos de sobrecarga, o que é uma vantagem nesta aplicação. São utilizados aprox. 20 módulos por cobra. Estes estão também a ser atualmente combinados em outros “animais”.
Octofante
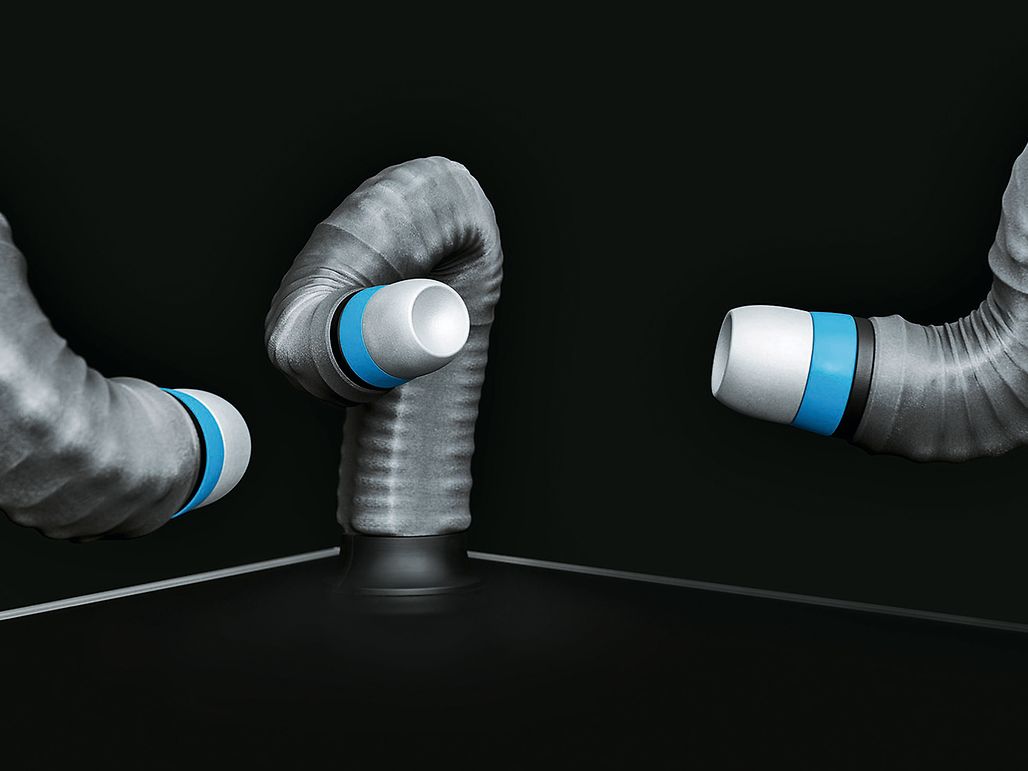
Recorrentemente, os engenheiros da Festo apresentam conceitos biónicos espantosos para a cooperação de humanos e robôs. Isto também se aplica a um dos seus mais recentes desenvolvimentos: o BionicMotionRobot. Este robô foi modelado com base na tromba de um elefante e nos tentáculos de um polvo. O resultado é um robô pneumático leve com doze graus de liberdade, capaz de suportar uma carga útil de três quilogramas. Tal como os modelos naturais, o BionicMotionRobot oferece movimentos flexíveis e consegue dobrar-se em três direções diferentes ao mesmo tempo. Segundo a Festo, uma pele fabricada a partir da tecnologia inovadora de fibras, inspirada nas fibras musculares dos tentáculos de um polvo, permite explorar todo o potencial de potência da cinemática.