maxon Story
Exoesqueleto médico para reabilitação

O objetivo alcançado foi o de fornecer uma terapia de tratamento inteligente, orientada por dados, para lidar com deficiências neurológicas e de movimento músculoesquelético.
O principal objetivo da Harmonic Bionics é capacitar os doentes e os prestadores de cuidados, concebendo tecnologia inteligente que permita um protocolo de tratamento orientado por dados quando se lida com deficiências neurológicas e de movimento músculoesquelético. Para este fim, a empresa foi responsável pela conceção e montagem completa do seu exoesqueleto Harmony SHR™ bilateral de extremidade superior.
Ao permitir uma intervenção precoce, uma repetição funcional e uma terapia baseada em intenções, o Harmony SHR proporciona aos utilizadores a capacidade de melhorar a eficiência e eficácia da reabilitação da parte superior do corpo. Enquanto principal produto da empresa, o SHR Harmony foi concebido para fornecer um valor único em três áreas de atuação: investigação em neurociência e ciência do movimento, avaliação de distúrbios do movimento e reabilitação. A Harmonic Bionics selecionou componentes comerciais prontos a utilizar (COTS) para integrar nos seus vários atuadores robóticos de acordo com os requisitos de cada atuador, a fim de simplificar os esforços de conceção do produto. A empresa teve, por vezes, de efetuar pequenos compromissos na fase de conceção, por exemplo, entre o tamanho do atuador e o peso/capacidade de carga e entre o binário máximo e a sensibilidade ao binário. O produto final é suficientemente robusto para ajudar nos exercícios físicos sem ser demasiado pesado ou incómodo de utilizar.
Normalmente em aplicações de braços robóticos, as pessoas têm de ser afastadas dos braços robóticos para que o robô não possa ferir as pessoas enquanto se move. A maioria dos braços robóticos no mercado não são concebidos para interagir com seres humanos em segurança — não conseguem detetar uma pessoa no seu caminho ou mover-se à volta de uma pessoa enquanto executam a tarefa programada. Devido a este facto, os robôs típicos podem ser muito perigosos para a interação com as pessoas, especialmente no contexto da fisioterapia. Este problema não se coloca com o SHR Harmony, que foi concebido para ser sensível à força e para ser controlado por entradas de força dos utilizadores em vez dos pontos de ajuste de posição típicos da maioria dos braços robóticos.
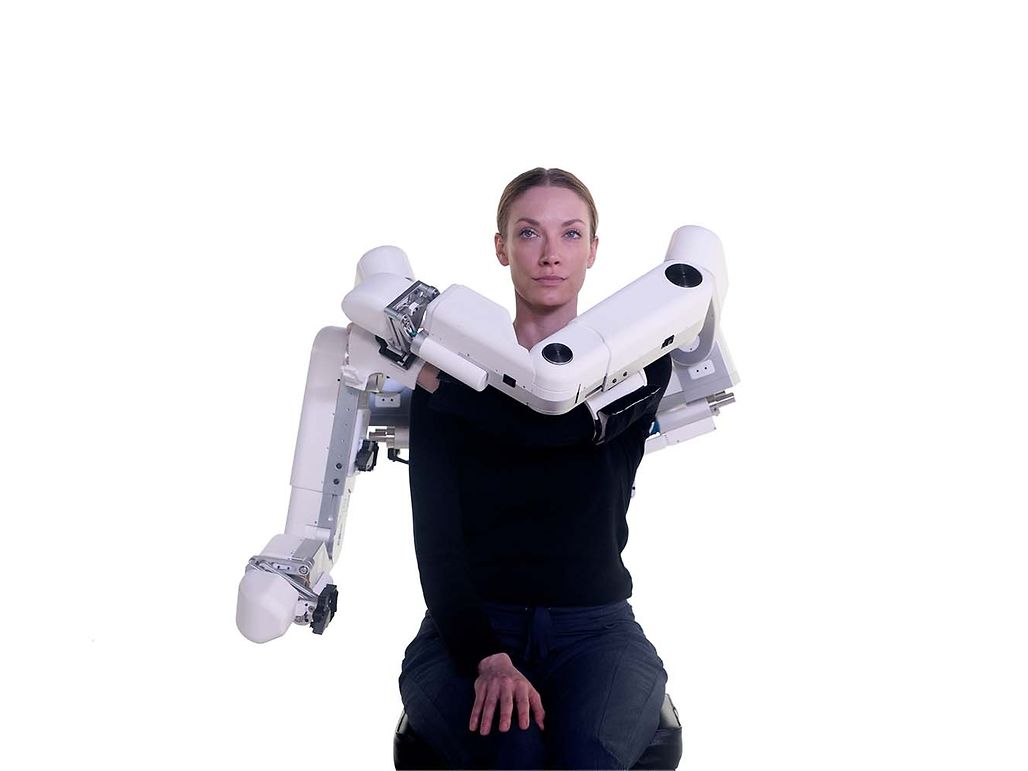
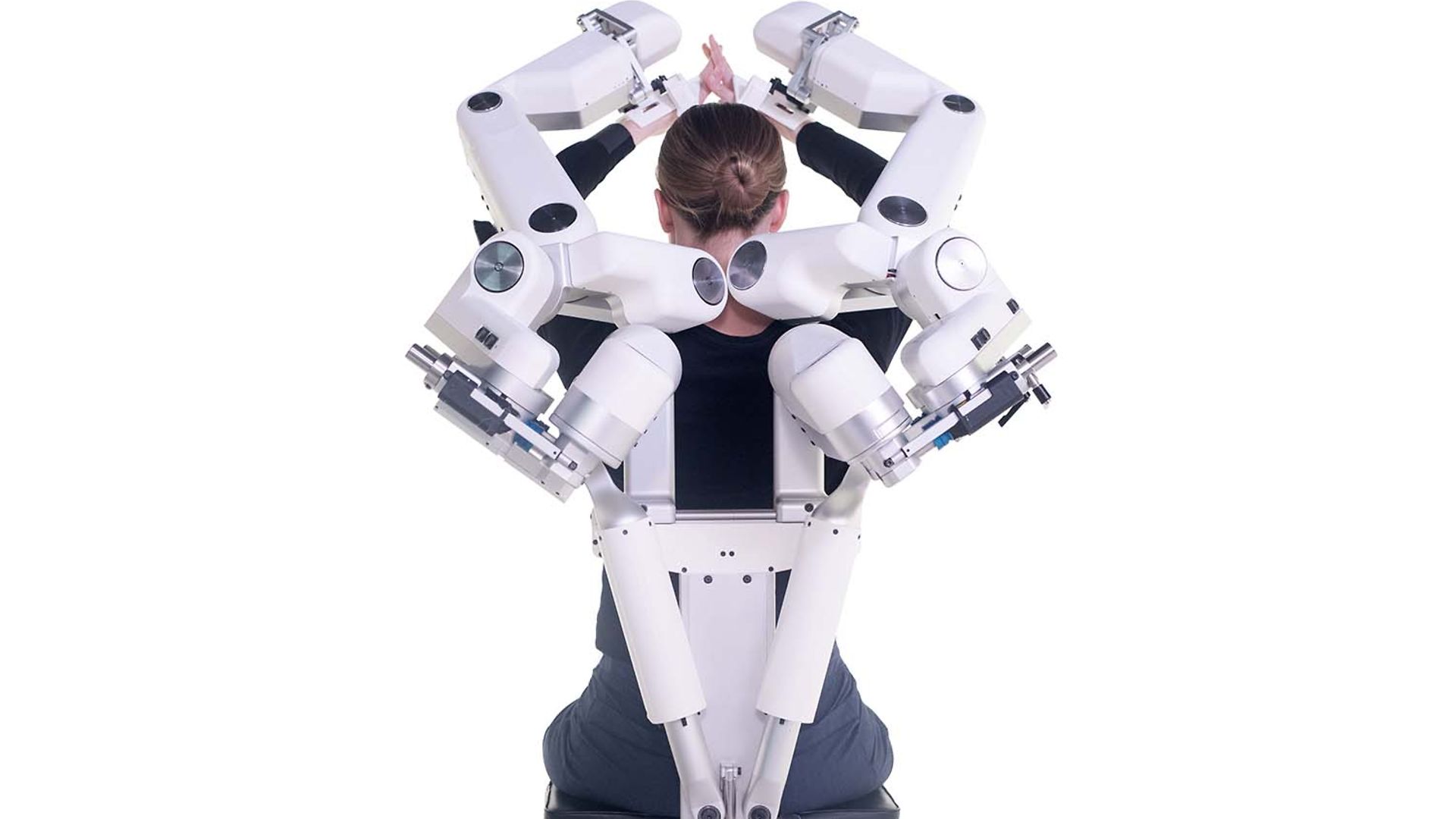
Figura 1: A precisão é menos importante para a reabilitação, em especial durante os exercícios.
Para ajudar os pacientes nos exercícios, é muito mais importante que o robô aplique forças exatas ao paciente em vez de os posicionar com precisão (ver figura 1). O robô foi concebido tendo em consideração a obediência, para que até mesmo as pequenas forças aplicadas possam fazer com que o robô saia do caminho, abrande ou pare completamente. Esta funcionalidade torna o exoesqueleto robótico extremamente seguro.

Figura 2: O sistema de controlo ESCON da maxon é um complemento potente e compacto ao exoesqueleto Harmony SHR.
Esta sensibilidade à força exigiu uma nova conceção dos típicos atuadores robóticos. A Harmonic Bionics desenvolveu um atuador robótico patenteado, que utiliza uma célula de carga que é mecanicamente isolada de quaisquer cargas estranhas. O resultado é a capacidade de cada célula de carga sentir a força exercida apenas pela articulação do robô em que está montada, enquanto está isolada das forças aplicadas a outras, maximizando assim a precisão de deteção da célula de carga. Os sistemas de controlo ESCON, fabricados pela maxon, eram compactos e fáceis de integrar elétrica e fisicamente (ver figura 2). Constatámos que o software era simples de utilizar. Os motores tinham fichas técnicas informativas que os tornavam simples de integrar. Raramente tivemos de rever a nossa seleção de motores porque as fichas técnicas ajudam-nos a tomar a decisão motora correta à primeira.
Os atuadores utilizados no exoesqueleto Harmony SHR são atuadores rotativos com saída de deteção de binário e ângulo, utilizados para auxiliar o movimento do paciente, ou atuadores lineares com feedback de posição, utilizados para redimensionar o robô para que se adapte a um paciente específico. O exoesqueleto foi concebido para fornecer uma avaliação objetiva das capacidades de movimento de um paciente. O sistema incorpora mais de 80 sensores que registam medições 2000 vezes por segundo, permitindo medir com precisão vários parâmetros, incluindo amplitude do movimento, criação de força e número de repetições.
O sistema de movimento utiliza vários motores concebidos e fabricados pela maxon. A maxon foi capaz de fornecer motores que satisfazem uma ampla variedade de necessidades únicas do sistema. Por exemplo, os motores EC Flat forneciam a saída de binário elevada necessária num pacote compacto, que se adapta ao tamanho compacto do exoesqueleto (ver figura 3). Os motores planos também podem ser fornecidos com sensores de ângulo.
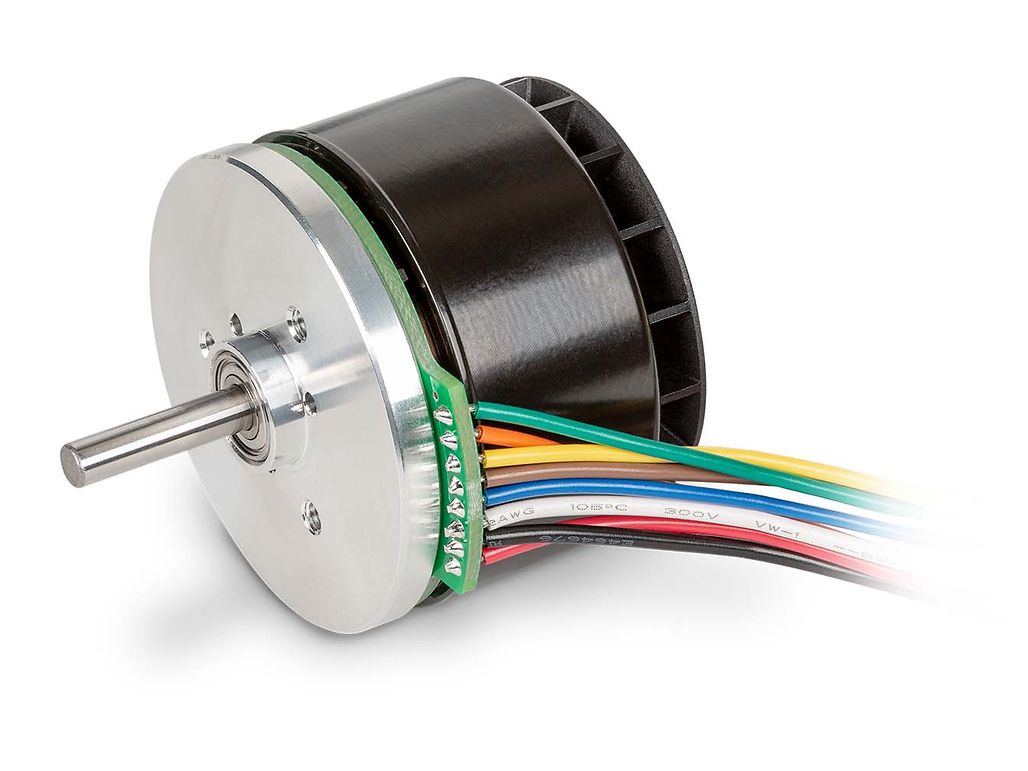
Figura 3: O motor EC 60 Flat maxon fornece binário elevado num pacote compacto.
Foi selecionado um motor EC 60 Flat porque o diâmetro externo era semelhante ao do acionamento harmónico e por ser axialmente compacto. O veio de um motor EC 60 DC Flat maxon está ligado a um gerador de ondas de um acionamento harmónico de tamanho 17, que foi selecionado pelo seu tamanho axial compacto e elevada capacidade de binário. Os redutores de engrenagens de transmissão harmónica ofereceram as elevadas reduções, a reduzida folga e a elevada capacidade de binário que a empresa necessitava para a conceção.
O estator do motor maxon é montado na ranhura circular da transmissão harmónica. A ranhura flexível da transmissão harmónica está ligada a um veio de saída suportado por um rolamento de rolos cruzados, que suporta todas as cargas que não são a saída de binário do atuador. Como o rolamento de rolos cruzados suporta as outras cargas, a única carga que atua sobre o sensor de carga é a saída de binário do sensor de carga.
O motor maxon, o veio de saída e o conjunto de transmissão harmónica são livres de rodar no rolamento de rolos cruzados. Um suporte é ligado à ranhura circular da transmissão harmónica e ao estator do motor maxon. Um sensor de carga é ligado ao suporte para que o binário de saída do conjunto global possa ser medido através do sensor de carga.
O alinhamento da transmissão harmónica ao veio do motor maxon é bastante crítico para a vida útil do atuador. Mesmo um pequeno desalinhamento pode provocar o desgaste prematuro ou a falha do mecanismo. Portanto, os componentes maquinados são fabricados de forma a estarem paralelos a cerca de 20 mícrones, enquanto a concentricidade é mantida dentro de cerca de 30 mícrones para alinhar a ranhura circular ao motor maxon. A dimensão geral dos atuadores dentro do robô é de aproximadamente 80 mm em diâmetro e 90 mm em comprimento. Os componentes maquinados que são integrados em todos os atuadores são fabricados em várias ligas de alumínio resistentes à fadiga e titânio de grau 5, onde as tensões são elevadas.
O binário de saída do atuador global é de aproximadamente 30 Nm e o atuador pode produzir mais de 100 Nm de pico. O atuador está ligado a uma célula de carga extremamente sensível, que possui uma resolução inferior a 10 mNm. Cada atuador é concebido para uma vida útil superior a 3 milhões de revoluções.
Conclusão
Os atuadores utilizados no Harmony SHR têm um design aperfeiçoado e espera-se que precisem de poucas melhorias no futuro. De acordo com a empresa, é improvável que venham a mudar qualquer um dos componentes COTS durante futuras revisões, particularmente os componentes maxon. Os motores DC da maxon foram facilmente personalizados, além de que a empresa ofereceu versões de folga reduzida dos redutores de engrenagens para serem usados nos atuadores rotativos, bem como combinações de motor DC com escovas de pequeno diâmetro + caixa de redutores planetária para criar atuadores rotativos compactos. Os redutores de engrenagens de fuso da empresa estavam também disponíveis para serem utilizados em aplicações com atuadores lineares. Tudo isto para dizer que a maxon foi capaz de fornecer todos os motores e sistemas de controlo necessários para a aplicação, tornando-se o único fornecedor de confiança da Harmonic Bionics.
Image Copyrights
Harmonic Bionics