Expert Blog
Do motor ao sistema de acionamento

A maxon motor está cada vez mais a evoluir de um fornecedor de componentes para um fornecedor de soluções de sistemas. Os componentes são os motores, redutores, codificadores, bem como os sistemas de controlo de posição e velocidade. Como sistema, consideramos soluções de acionamento completas no sentido de unidades e subsistemas mecatrónicos, que estão integrados num contexto mais amplo. O foco passa dos componentes individuais utilizados para a funcionalidade principal a cumprir.
O ponto inicial é um componente personalizado, mais precisamente, um motor plano. Para uma melhor dissipação de calor, o rotor é perfurado e é necessário um cabo e um conector especiais para efetuar a conexão ao sistema eletrónico do acionamento do motor personalizado. A finalidade exata do motor e as respetivas interfaces mecânicas e elétricas não são conhecidas no início. Só depois de um olhar mais atento do cliente se torna claro que o motor aciona uma junta robotizada com redutor. O espaço altamente limitado associado a uma montagem correspondentemente complexa da solução existente e as funcionalidades adicionais necessárias são boas razões para uma solução de sistema integrado.
Requisitos mecânicos
· Baixas velocidades e elevados binários exigem um motorredutor
· Amplitude de movimento à saída da engrenagem: aprox. 120°
· Bloqueio da junta em caso de falha de energia (travão de imobilização)
· Possibilidade de desbloquear o bloqueio. O sistema não pode ser de autobloqueio.
· Cabos para passagem pelas juntas
Requisitos elétricos e eletrónicos
· Controlador para o motor sem escovas (incl. controlo da corrente, velocidade e comutação)
· Comunicação com o controlo principal de nível superior
· Sensor angular para a saída da engrenagem e motor, informação de posição a enviar ao controlo principal
Tudo isto acontece no contexto de peso e dimensões limitadas e predefinidas. Além disso, as emissões (temperatura, vibração e ruído audível) têm de ser mantidas a um nível reduzido. Alimentado a baterias, o sistema deve funcionar de forma energeticamente eficiente. E, claro, os custos têm também de ser considerados.
A lista de requisitos é uma demonstração para os aspetos a ter em conta quando se procura uma solução integrada. Só uma comunicação intensa e aberta entre o cliente e o integrador de sistemas pode esclarecer estes aspetos.
Delimitação do sistema
A primeira questão a responder é a seguinte: o que deve incluir o sistema? Onde podem ser estabelecidos limites razoáveis do sistema tendo em conta a funcionalidade a alcançar? Como é o ambiente do sistema e as interfaces mecânicas e elétricas? De que forma é trocada a informação e como é que o utilizador final comunica com o sistema completo?
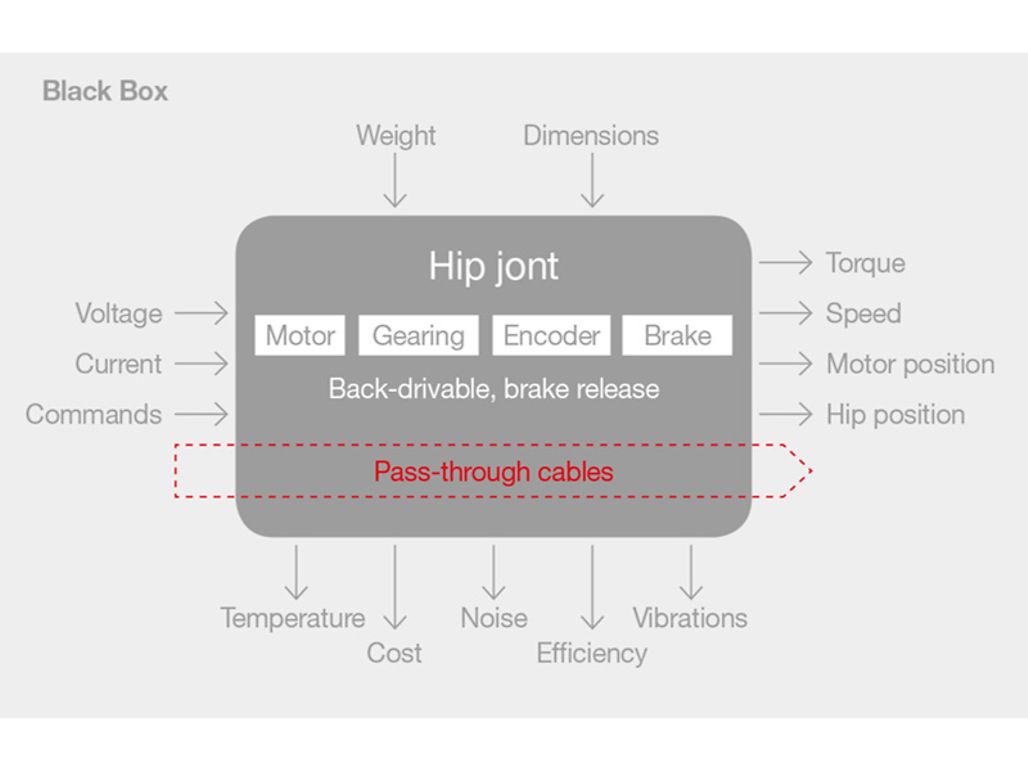
Durante o desenvolvimento de sistemas complexos são envolvidas pessoas com diferentes conhecimentos e diferentes pontos de vista. Como estabelecer a comunicação de uma forma ideal para que todas as pessoas compreendam e procurem alcançar os mesmos objetivos? Uma caixa preta como a acima esquematizada pode ajudar. Uma abordagem descendente (top-down), que não se perca em detalhes, também pode ser sensata. Uma outra questão frequentemente ignorada ao trabalhar com sistemas completos: de que forma podemos ter em consideração as necessidades do utilizador final?
Especificação de sistemas
O fator desencadeador do desenvolvimento de um sistema pode conter dicas importantes para a formulação dos objetivos a alcançar. É um novo desenvolvimento? É uma melhoria de uma solução existente? Por que motivo a solução existente não é satisfatória? A base para a especificação é sempre uma análise da situação: do que se trata realmente? Como é o contexto do sistema? É importante formular o catálogo de objetivos de forma neutra, ou seja, sem pressupor uma solução. No exemplo acima, o bloqueio necessário em caso de falha de energia também pode ser conseguido através de uma engrenagem de autobloqueio e não apenas por um travão de imobilização.
Soluções
O catálogo de objetivos serve de base para desenvolver diferentes soluções, as quais têm de ser avaliadas pela sua adequabilidade. As soluções possíveis requerem muitas vezes produtos existentes. Neste contexto, menciono o design da plataforma de produtos da maxon nos últimos anos. Esta plataforma permite recorrer a componentes existentes e comprovados durante o desenvolvimento do sistema, que pode, além disso, ser rapidamente personalizado. Tudo isto minimiza os riscos tecnológicos, temporais e económicos.
Na maioria das vezes, os sistemas da maxon aparecem num contexto mecatrónico que combina componentes mecânicos e elétricos: sistemas mecânicos de acionamentos, atuadores, sensores, sistemas de controlo. O software é cada vez mais importante, por exemplo, sob a forma de firmware do sistema de controlo ou de um programa de computador que controla uma instalação completa.
Ao relacionar diferentes soluções, a comparação tem de ser justa. Por exemplo, para o cliente os custos de um sistema integrado têm de ser equilibrados não só com os custos dos componentes individuais, mas também com os custos das interfaces e da montagem.
Condições económicas limite
Uma componente integral da análise da situação é saber se e quando um novo design compensa. Quais as quantidades esperadas num determinado período de tempo? As estimativas de mercado realistas são imperativas. Estas têm de definir se os custos não recorrentes de engenharia e de ferramentas devem fazer parte do preço do produto ou se são pagos separadamente. Basicamente, um cálculo do valor atual líquido (VAL) pode ser útil para a decisão económica de iniciar um projeto. Contudo, outros critérios são as considerações da adequação estratégica e uma análise de risco.
Em resumo, para além dos aspetos aqui apresentados, siga os passos e procedimentos explicados no manual “Seleção de microacionamentos de alta precisão”.
A propósito
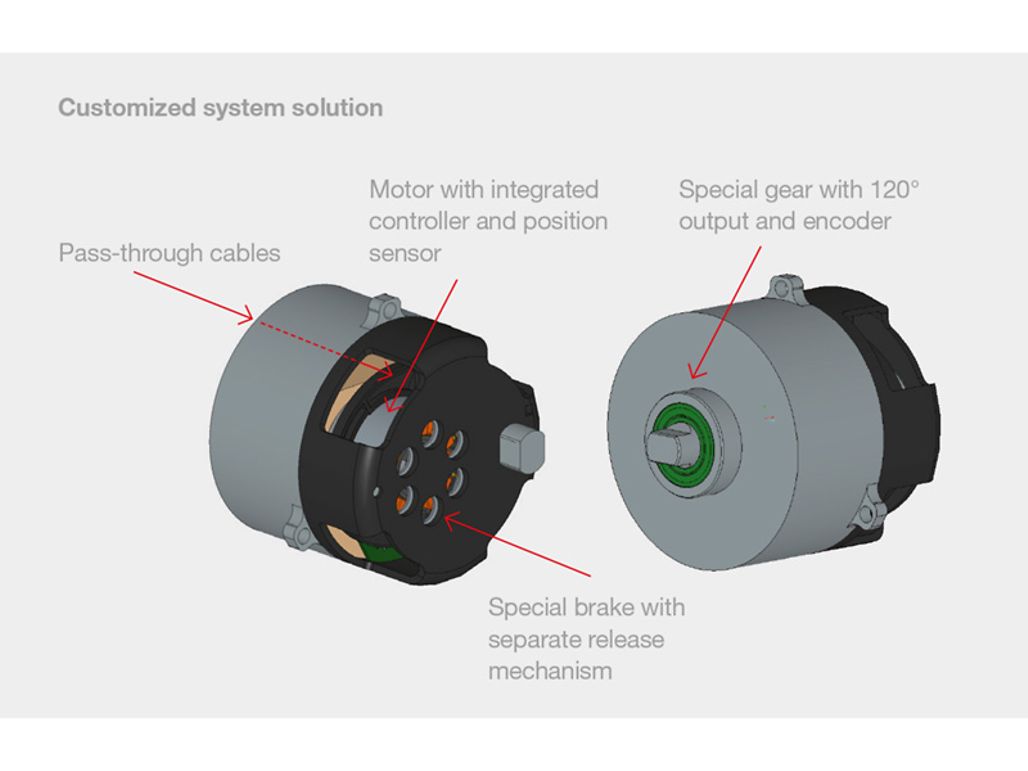
A solução proposta para a articulação da anca do robô consiste no motor originalmente selecionado, mas com um sistema eletrónico integrado baseado na plataforma de sistema de controlo ESCON da maxon e combinado com uma engrenagem especial. As posições do motor e da engrenagem são fornecidas por codificadores integrados. Um travão de imobilização especialmente concebido atua diretamente sobre o rotor e está localizado na caixa compacta. Para o cliente, a montagem deste sistema integrado é muito mais simples e rápida em comparação com a solução existente composta por componentes únicos.