Expert Blog
Controlo sem sensor de motores sem escovas


Inúmeras aplicações beneficiariam de um motor sem escovas e sem um sensor. Existem várias opções para o conseguir. Um método desenvolvido pela maxon está agora a estabelecer novos padrões de precisão e fiabilidade.
Acionar um motor sem escovas exige um sistema eletrónico de controlo para uma comutação precisa. No entanto, isto apenas é possível se o sistema eletrónico de controlo “conhecer” sempre a posição exata do rotor. Tradicionalmente, esta informação era fornecida por sensores — por exemplo, sensores de Hall — instalados no interior do motor. Mas isso pode ser realizado de forma diferente. Métodos de controlo sem sensor utilizam a informação de corrente e tensão do motor para determinar a posição do rotor. A velocidade do motor pode ser derivada de alterações na posição do rotor e esta informação pode ser utilizada para o controlo da velocidade. Métodos de controlo sem sensor mais avançados podem até controlar a corrente (binário) e a posição. Abdicar dos sensores tem inúmeras vantagens, tais como menos custos e economia de espaço, uma vez que os cabos, conectores e circuitos eletrónicos sensíveis deixam de ser necessários.
Os sistemas de controlo sem sensor da maxon utilizam três princípios básicos que estão especificamente adaptados aos motor BLDC da maxon.
Princípio 1: método da força eletromotriz com passagem por zero
O método da força eletromotriz com determinação da passagem por zero utiliza a tensão induzida (ou força eletromotriz) na fase sem energia durante a comutação de bloco. A passagem por zero acontece no meio do intervalo da comutação (fig. 1). O tempo de atraso para o ponto de comutação seguinte pode ser determinado a partir dos passos de comunicação anteriores.
O método da força eletromotriz com passagem por zero apenas funciona se a velocidade for suficientemente alta, porque a força eletromotriz fica a zero em caso de paragem. O arranque do motor requer um processo especial, semelhante ao controlo do motor de passo, e tem de ser configurado separadamente. A verdadeira comutação sem sensor apenas é possível com velocidades do motor de 500–1000 rpm e superiores. A frequência dos passos de comutação é utilizada para o controlo da velocidade. A informação de feedback limitada coloca algumas restrições à dinâmica motora, embora esta possa ser melhorada integrando métodos de estimativa no algoritmo de controlo (observador, filtro de Kalman, etc.). O método da força eletromotriz com passagem por zero tem inúmeras vantagens: funciona em todos os modelos de motores sem escovas, sendo ainda robusto e rentável. A abordagem é utilizada em vários produtos normalizados, tais como o ESCON Module 50/4 EC-S da maxon.
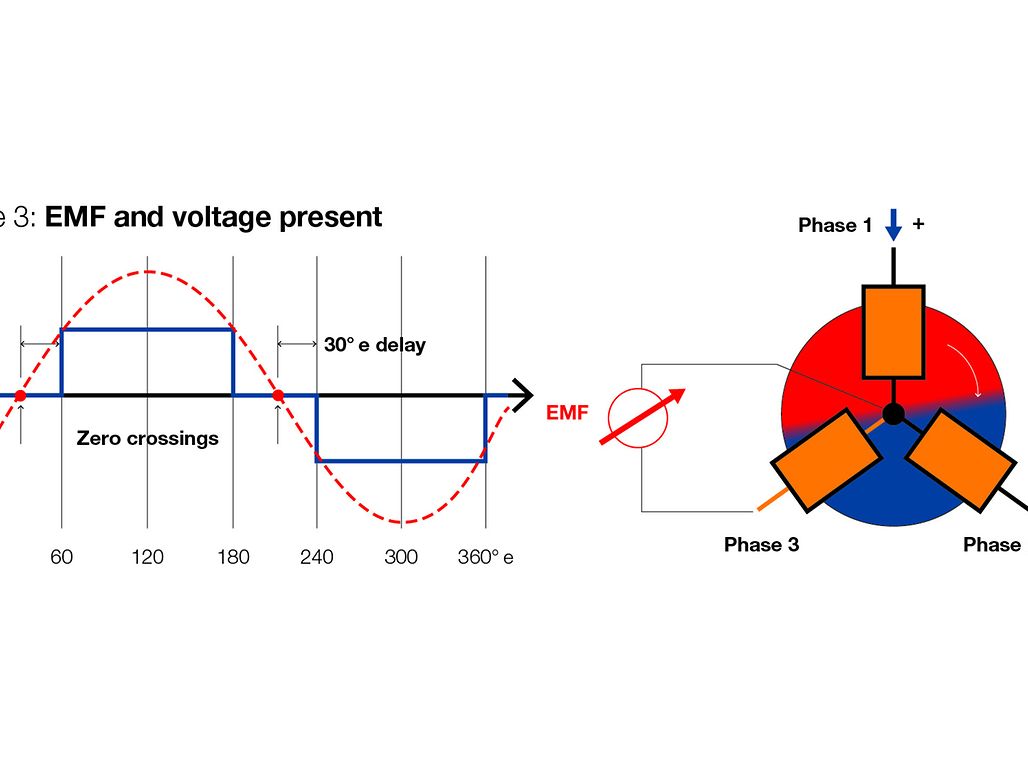
Figura 1: Ilustração esquemática da comutação sem sensor do método da força eletromotriz com passagem por zero, mostrada aqui recorrendo à fase 3 como exemplo.
Princípio 2: método da força eletromotriz baseado no observador
Os métodos da força eletromotriz baseados no modelo ou no observador utilizam a informação sobre a corrente do motor para determinar a posição do rotor e a velocidade. A abordagem baseada no modelo produz uma resolução muito superior da posição do rotor. Isto permite uma comutação sinusoidal (ou FOC, controlo orientado ao campo), com todas as suas vantagens: maior eficiência, menor produção de calor, menos vibração e ruído. No entanto, o método da força eletromotriz baseado no observador também exige uma velocidade mínima de vários 100 rpm para funcionar corretamente.
Princípio 3: métodos de anisotropia magnética
Os métodos baseados na anisotropia magnética deduzem a posição do rotor a partir da indutância do motor, que é mínima se os fluxos magnéticos do rotor e do estator estiverem em paralelo no retorno magnético (fig. 2). A medição é obtida através de breves impulsos de corrente, que não provocam o movimento do motor. Ao contrário dos métodos baseados na força eletromotriz, este método também funciona quando parado ou com velocidades muito reduzidas e permite a comutação sinusoidal. Os sinais medidos são altamente dependentes do tipo de motor. A posição do motor é determinada num modelo do motor, que tem de ser parametrizado e adaptado a cada motor. Os sistemas de controlo baseados na anisotropia magnética são, portanto, produtos altamente específicos — a conexão “plug and play” não é uma opção. O esforço de comutação exigido para avaliar a posição do rotor também limita a velocidade máxima.
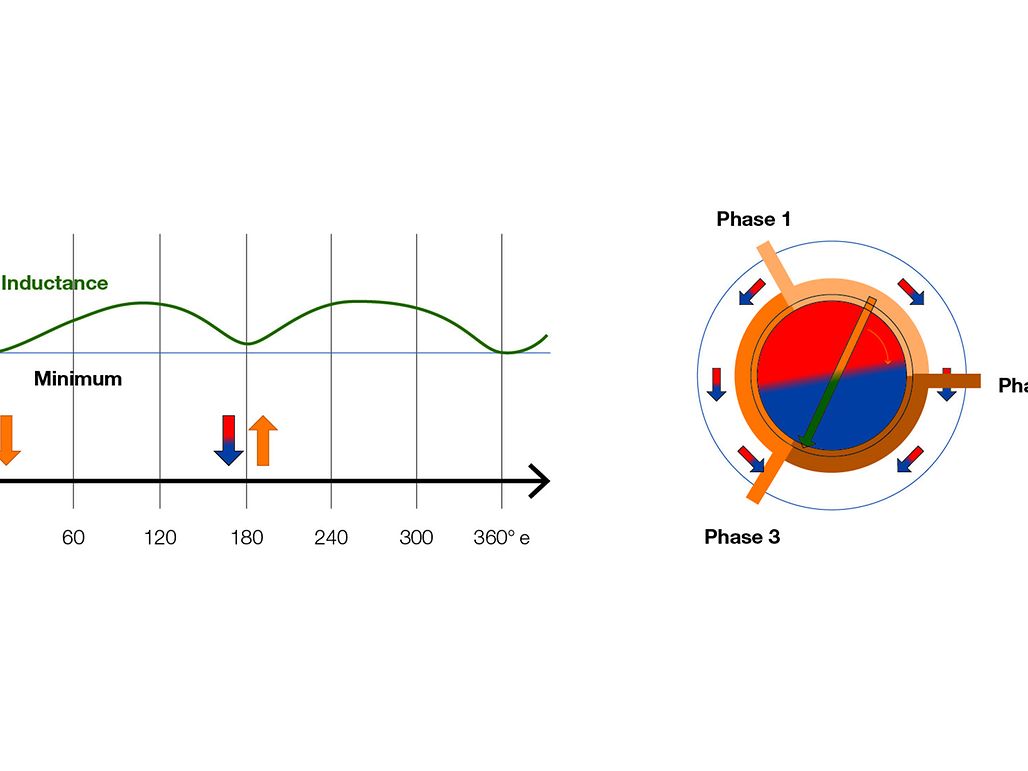
Figura 2: Diagrama esquemático da anisotropia da indutância. Este diagrama mostra dois mínimos praticamente idênticos a uma distância de 180 graus elétricos.
Porquê optar por um controlo sem sensor?
Em aplicações sensíveis à evolução dos preços, a utilização de motores sem sensor pode reduzir custos. Sensores de Hall, codificadores, cabos e conectores deixam de ser necessários. As aplicações habituais neste campo são ventiladores, bombas, scanners, fresas, perfuradores e outras aplicações de rotação rápida com um desempenho de controlo relativamente modesto, que não requerem um arranque controlado de forma rigorosa. Para elevadas quantidades, pode fazer sentido uma versão personalizada do sistema de controlo baseado na força eletromotriz.
Otimização de custos para um elevado desempenho de controlo
A poupança de custos não é a única razão para optar por controlo sem sensor. Aplicações como acionamentos de portas ou de bicicletas exigem um elevado desempenho do sistema de controlo. O controlo suave do motor a partir de zero rpm, assim como a alta dinâmica e a comutação sinusoidal são importantes para evitar o ruído. Tudo isto tem de ser realizado sem utilizar um codificador dispendioso. Ao longo dos últimos anos, sistemas de controlo sem sensor de alta qualidade, baseados no método de anisotropia, têm vindo a demonstrar o seu valor, incluindo o novo High Performance Sensorless Control (controlo sem sensor de alto desempenho) da maxon (HPSC, ver abaixo). No entanto, os esforços de engenharia necessários para adaptar os parâmetros do modelo apenas podem ser justificados para quantidades superiores a algumas centenas.
Condições ambiente adversas
O controlo sem sensor também pode ser exigido em situações onde seja necessário evitar sistemas eletrónicos de sensores sensíveis num motor. Os exemplos incluem aplicações em temperaturas ambiente muito altas ou muito baixas, limpeza e esterilização na tecnologia médica ou radiação ionizante no espaço, instalações nucleares ou ambientes médicos. O número reduzido de conectores do motor também simplifica a integração, se o espaço for limitado.
A qualidade do controlo exigida depende da aplicação. A decisão do método sem sensor mais adequada tem de ser tomada caso a caso. Por exemplo, ferramentas dentárias manuais para perfurar ou polir necessitam de velocidades elevadas, enquanto que velocidades mais baixas e binário controlado são necessários para fixar parafusos em cirurgia.
Conclusão
Existem três principais motivos para optar por um controlo sem sensor: poupança de custos, de espaço e operação em ambientes desfavoráveis a sensores. O método da força eletromotriz com determinação da passagem por zero está generalizado em aplicações sensíveis à evolução dos custos, que funcionam a altas velocidades. O controlo sem sensor durante a imobilização ou a baixas velocidades requer métodos mais avançados. Os esforços de implementação são superiores e incluem modelagem e parametrização. A poupança de custos é secundária. O controlo orientado no campo produz uma maior eficiência, menos acumulação de calor e um menor nível de vibração e ruído. Todas estas vantagens são especialmente favoráveis para os dispositivos médicos portáteis.

Sistemas de controlo sem sensor da maxon
__The HPSC Module 24/5 (High Performance Sensorless Control) é um novo desenvolvimento da maxon e é uma plataforma de hardware e software específico do cliente. HPSC é sempre uma solução personalizada e, portanto, não é um produto de catálogo. O que torna este desenvolvimento especial é o seguinte: durante uma imobilização ou a baixas velocidades, a tecnologia de controlo baseada na anisotropia magnética é utilizada em primeiro lugar (princípio 3). De seguida, se a velocidade for superior, segue-se uma transição suave para um método de força eletromotriz baseado no observador (princípio 2). O firmware do módulo é personalizado para cada sistema de acionamento. Num processo de ajuste especial, mais de 120 parâmetros são automaticamente ajustados à “impressão digital” de cada motor. Um exemplo de utilização do HPSC é a ferramenta médica portátil recentemente desenvolvida pela maxon.
__The ESCON Module 50/4 EC-S é o único sistema de controlo sem sensor da maxon incluído no catálogo de produtos (comutação de bloco com o método da força eletromotriz e determinação da passagem por zero). O Sistema de controlo Sem Sensor 24/1 é uma alternativa aos motores EC mais pequenos (até cerca de 10 mm de diâmetro). Contudo, não está incluído no catálogo ou na loja online.