maxon Story
스마트한 플로팅 암


이 팔은 뱀처럼 움직이며 인간에게 너무 좁거나 위험한 장소에 도달합니다. 도쿄에 본사를 둔 HiBot 사의 견고한 로봇 팔은 검사, 유지관리 및 수리를 새로운 차원으로 끌어 올립니다.
과거에는 산업 플랜트, 건물 또는 교량 건설에서 유지관리는 크게 고려되지 않았습니다. 결과적으로 노후된 대상의 유지관리는 어렵고 비용이 많이 들게 됩니다. 그러나 최신 MRO(유지관리, 수리 및 점검) 로봇의 도움으로 합리적인 비용으로 손상을 감지, 검사 또는 예측할 수 있습니다. 이를 통해 필수 인프라의 확장된 사용이 가능하고 정전 및 사고를 방지할 수 있습니다. HiBot의 CEO인 미켈레 구아르니에리(Michele Guarnieri)는 다음과 같이 설명합니다. “기본적으로 저희는 잘못된 유지관리로 인해 위험에 처한 생명을 구하고 있습니다.” 회사 연혁에서 알 수 있듯이 검사 자체의 안전성도 중요한 역할을 합니다.
후쿠시마에서의 적용
이 회사는 HiBot의 원래 스핀아웃이었던 도쿄공업대학(Tokyo Institute of Technology)의 히로세(Hirose) 교수와 협력하여 2016년 후쿠시마 다이이치 원자력 발전소의 해체 중에 사용된, 팔다리가 여러 개 있는 긴 팔을 개발했습니다. 2주 동안 이동 로봇은 원자로 건물 내부에서 동영상을 촬영하고 3D 데이터를 수집했습니다. 이 건물은 2011년 쓰나미 이후 수소 폭발로 파괴된 건물이었습니다. 따라서 전문가들은 실시간으로 높은 수준의 명령을 전송하여 그 플랜트의 검사를 원격으로 제어했습니다. 그 임무를 수행하며 얻은 데이터는 전례 없는 수준의 세부 정보로 깊은 인상을 주었고 후속 잔해 제거 계획 및 제어를 용이하게 했습니다.
방사능 오염으로 인해 이 중요한 작업에 인력을 투입하는 것은 불가능했습니다. 드라이브와 전자 장치도 방사선으로부터 보호되어야 했기 때문에 조작기의 바닥에 보관되었다는 사실은 높은 방사선 수준을 설명합니다.


다층 검사
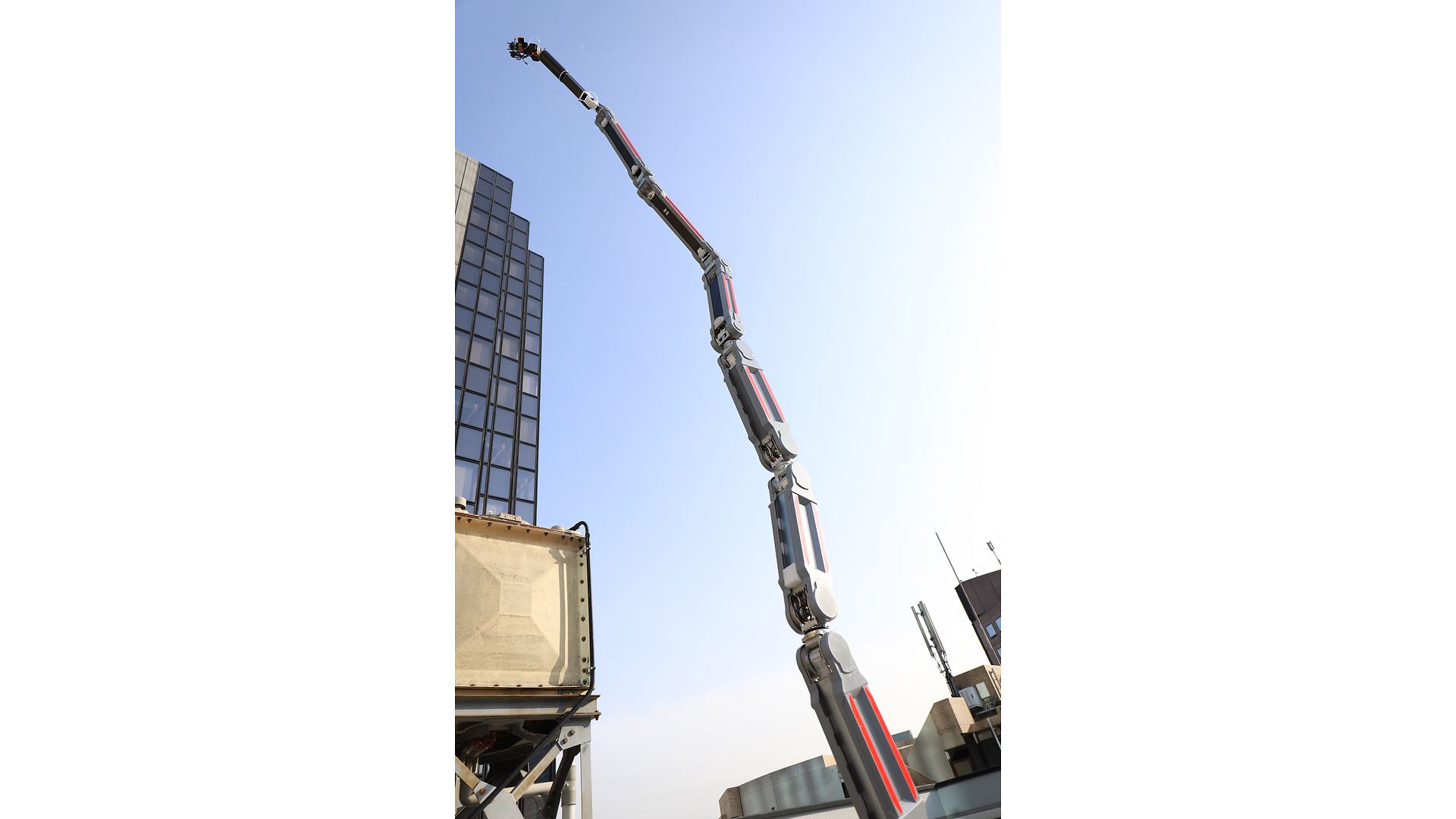
후쿠시마 애플리케이션을 기반으로 HiBot는 슬림하고 가벼운 플로트 암을 개발했습니다. 기존의 부피가 큰 조작기와는 달리 다양한 플랫폼이나 크레인에 쉽게 조립할 수 있으며 제한된 공간에서 작동할 수 있습니다. 최대 7.5m 길이의 독창적인 디자인은 인간 손의 힘줄과 유사합니다. 또한 고유한 무게 보정 개념으로 여러 특허를 출원 중에 있습니다.
기본 버전에는 강력한 광학 줌을 갖춘 검사 카메라, 초음파 프로브, 3D 센서 및 본체를 따라 분산된 내비게이션 카메라가 장착되어 있습니다. 애플리케이션에 따라 적외선 카메라 또는 간단한 유지관리 공구와 같은 다른 공구로 교체할 수 있습니다. 즉, 플로트 암은 연료 탱크 청소 또는 코팅에서 높은 랙에 있는 파이프의 초음파 검사 및 압력 용기의 육안 검사에 이르기까지 검사 관련 작업도 수행할 수 있습니다.
여러 센서의 도움으로 얻은 데이터는 반자율적으로도 가능한 내비게이션과 자산의 3D 모델 구축을 지원합니다. 이를 통해 사전에 계획된 검사 임무를 더 안전하고 빠르게 수행할 수 있습니다.
양서류 같은 로봇까지
속도는 특히 항공에서 중요한 기준이 됩니다. 미켈레 구아르니에리는 다음과 같이 설명합니다. “저희는 현재 항공기 검사를 위한 특수 플로트 암을 개발하고 있습니다. 동체, 날개의 연료 탱크 또는 기타 제한된 공간 내에서 이동하는 경우 이러한 검사 암은 시간이 많이 걸리는 기존의 검사 지그에 대한 비용효율적인 대안임을 나타냅니다.”
효율적이고 신뢰할 수 있는 검사 장비에 대한 수요는 다른 산업에서도 높습니다. 이 CEO는 비파괴 테스트 및 검사 시장이 2024년까지 연간 126억 달러의 가치가 있을 것으로 추정하고 있습니다. 예를 들어, 현재 HiBot은 침수된 파이프나 보일러 파이프와 같은 열악한 환경에 투입할 수 있는 수륙 양용 로봇도 개발하고 있습니다. 현재 30명 이상의 직원으로 구성된 팀 또한 매우 슬림하고 기어가는 검사기를 사용하여 실험하고 있습니다. 예를 들어, Squid는 화학 산업에서 50mm 파이프에 사용하도록 설계되었습니다.

인공지능을 이용한 데이터 분석
최신 도구로는 오늘날의 MRO 요구 사항에 충분하지 않기 때문에 스마트 플랫폼은 현장의 로봇과 스마트 서비스를 결합합니다. HiBox를 사용하면 기계 학습을 활용하여 검사한 데이터를 시각화, 분석 및 처리하여 자율적으로 결함을 식별할 수 있습니다. 그러나 이 가상 도구는 소프트웨어 측면을 넘어 하드웨어에 완벽하게 통합될 수 있도록 합니다. 결과적으로 사용자는 자율 주행, 로봇 상태 모니터링 및 기타 서비스를 통해 로봇을 최대한 활용할 수 있습니다. HiBox는 검사된 항목을 추적하고 다양한 검사 프로세스에서 얻은 데이터를 비교하는 데 사용됩니다. 이를 통해 인프라의 예방적 유지관리뿐만 아니라 로봇의 상태 기반 모니터링도 가능합니다.
이와 같은 단일 소스 턴키 시스템은 MRO의 작업 속도를 높이고, 보고서 작성은 우선 이러한 품질을 최적화합니다. 미켈레 구아르니에리는 다음과 같이 덧붙입니다. "점점 더 많은 스마트 도구를 통합함으로써 HiBox 모델은 단계적으로 진화할 것입니다." 또한 도쿄의 로봇 공학 전문가들은 전 세계 실시간 지원을 포함하여 서비스형 로봇(Robot-as-a-Service)을 위한 비즈니스 모델을 곧 출시할 예정입니다.
최대 16개 축의 위치 제어
뱀 모양의 로봇 제어, SLAM 또는 센서 융합과 같은 정교한 기술을 사용할 때, HiBot은 전적으로 맥슨의 드라이브에 의존합니다. 일본 맥슨의 프로젝트 엔지니어인 히로시 이토(Hiroshi Ito)는 다음과 같이 회상합니다. “수년간의 테스트 기간 동안 HiBot 팀은 맥슨 드라이브의 정밀성, 신뢰성 및 광범위한 제품군에 확신을 갖게 되었습니다. 합리적인 도달 범위와 이동성을 보장하려면 플로트 암 자체와 같은 드라이브가 가볍고 컴팩트해야 하지만 동시에 상대적으로 높은 토크를 제공해야 합니다.” 도달할 거리에 따라 플로트 암은 10~16개의 축으로 구성되며 EC 9.2 플랫, EC 20 플랫, EC 32 플랫 및 EC 45 플랫 유형의 브러시리스 모터에 의해 위치가 제어됩니다.
주요 과제 중 하나는 무게와 균형에 영향을 주지 않고 전자 장치를 프레임에 통합하여 플로트 암이 제한 없이 작동할 수 있도록 하는 것이었습니다. 스위스 격언가 발터 퓌르스트(Walter Fürst)의 다음 격언은 본의 아니게 여기에 적절합니다. "팔이 끝나는 곳에서 실현 가능성이 시작됩니다." 물론 이것은 인간 명령자의 팔에 관한 것입니다.