maxon Story
차세대 문 로버(Moon Rover)

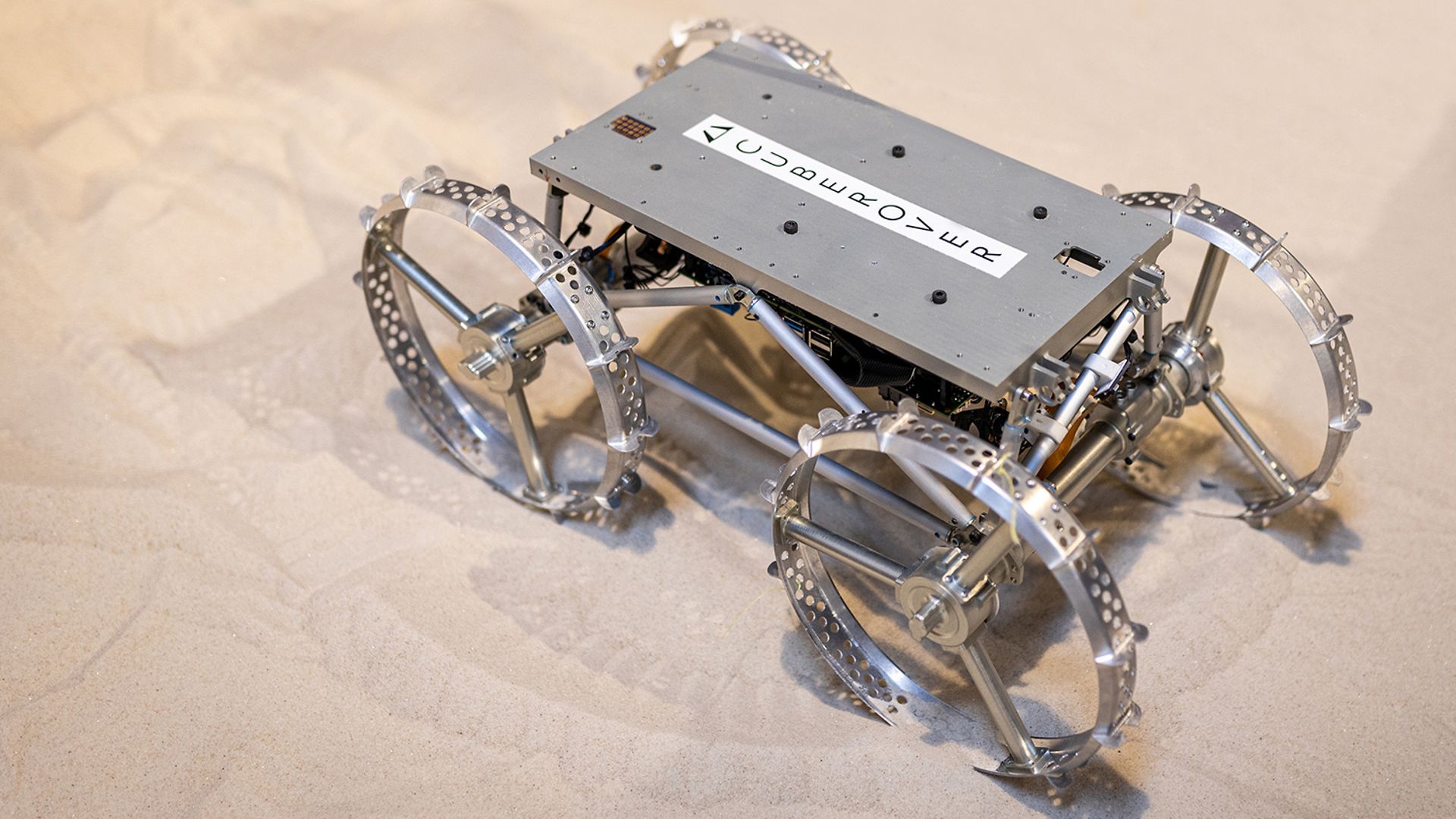
Astrobotic의 행성이동 부서가 제작한 CubeRover는 달의 표면에서 다양한 과학 기기와 화물을 운반하고 작동시키는 데 사용되는 적정한 가격의 서비스를 제공하기 위해 설계되었습니다.
NASA의 케네디 우주 센터(Kennedy Space Center)로부터 조언을 받으며 Astrobotic에서 개발한 CubeRover는 NASA의 중소기업혁신연구(Small Business Innovation Research: SBIR) 및 티핑 포인트(Tipping Point) 프로그램에서 재정적 지원을 받은 장비로서, 이제 달로 비행할 준비가 된 로버로 그 절정에 이를 것입니다. Astrobotic은 달 표면에서 기술 시연 및 과학 조사를 위한 진입 장벽을 낮출 수 있도록 MaaS(Mobility as a Service)를 제공하기 위해 CubeRover 제품군을 개선하고 상용화했습니다. 이 로버는 다가올 달탐사 임무를 위한 유용성을 극대화하기 위해 여러 달 착륙선과 호환되도록 설계되었습니다.
CubeRover는 작고 가벼워야 했으며 극심한 기후 변동을 처리하고 로버에서 작동하는 기기의 이동성을 극대화해야 했습니다. Astrobotic이 경량 설계, 자재 사용, 배터리 크기 및 모터 선택에 중점을 둔 점을 감안할 때, CubeRover는 무게가 약 4kg으로서 현재까지 제작된 로버 중 가장 가벼운 상용 유성 로버가 되었습니다. 이를 통해 비행 비용이 크게 절감되어 더 많은 고객이 달에 더 쉽게 접근할 수 있습니다.
CubeRover에는 Astrobotic의 페레그린 착륙선과 같이 달 표면에 알려진 물체를 기준으로 방향을 잡는 데 사용되는 보정된 카메라가 장착되어 있습니다. 이 로버의 운영팀에서 사용하는 이 현지화 데이터는 수집된 임무 데이터의 가치를 높여 페이로드 고객이 다음에 어디로 이동할지에 대해 정보에 입각한 결정을 내리고, 현지 위치 정보를 사용하여 데이터를 확인할 수 있도록 합니다. 또한 Astrobotic은 수화물 통합 프로세스를 단순화하기 위해 정의된 로버 전체에 산업 표준 인터페이스를 CubeRover 페이로드 사용자 가이드에 통합했습니다.
케네디 우주 센터의 입자 기계학 및 표토 운영 실험실(Granular Mechanics and Regolith Operations Laboratory)과 Astrobotic에서는 다양한 달의 표토 시뮬런트를 이용하여 CubeRover에서의 이동성 테스트를 수행하는 테스트를 진행하고 있습니다. 이러한 테스트는 임무 수행 중 나타나는 경사면, 틈 및 기타 표면 불규칙성에 대응하는 로버의 성능을 특성화합니다.
Astrobotic의 행성 이동성 수석 기계 엔지니어인 트로이 아버클(Troy Arbuckle)에 따르면 "우리는 수많은 페이로드 애플리케이션을 위한 이동성 플랫폼을 만들었습니다.” CubeRover는 기본적으로 달에 대한 연구를 원하는 모든 사람을 위한 공유 차량입니다. CubeRover는 표준 폼 팩터로 다양한 계측기 패키지를 지원한다는 점에서 CubeSats와 유사한 방법론을 사용합니다. CubeRover는 국제적으로 인정된 CubeSat 크기 조정 방법을 활용하여 페이로드의 부피와 운반 용량을 정의하는 바, 여기서 1kg의 페이로드를 지원하는 10cm x 10cm x 10cm 부피를 유닛 또는 "U"라고 합니다. Astrobotic은 현재 페이로드 시장의 수요를 충족시키기 위해 2U, 4U 및 6U CubeRover 크기를 개발하고 있습니다.

CubeRover 드라이브 트레인은 4개의 맥슨 BLDC 모터와 기어헤드를 각각 사용하며 달 표면뿐만 아니라 우주의 열악한 환경에서도 사용할 수 있도록 최적화되었습니다. 이러한 액추에이터의 우주 버전은 산업용 카탈로그와 동일한 것에서 시작하여 원래 Mars2020 퍼서비어런스 로버 미션의 일부로 JPL과 협력하며 개발되었습니다. 맥슨은 화성용 설계를 성공적으로 검증한 후, (화성과 관련된 과학적 미션과 비교하여) 비용에 민감한 상업용 우주 애플리케이션을 위해 설계 및 관련 생산 기술을 최적화했습니다.
그 목표는 Mars2020의 특정 설계 기능을 제거하면서 충격, 진동, 진공 및 넓은 온도 범위에 대해 모터를 견고하게 만드는 모든 주요 설계 기능을 유지하는 것이었습니다. 결과적으로 모터 및 이와 관련된 기어헤드는 우주 등급 제품의 계획된 분류에서 수위를 차지하였습니다.
설계만큼 중요한 것은 향상된 품질 보증 단계가 구현된 생산 기술입니다. 또한 확장된 ATP(인수 테스트 절차)에는 예를 들어, 인도된 각 액추에이터에 대한 100% 부하 테스트가 포함됩니다. 그 결과는 애플리케이션의 환경 조건 및 신뢰성 요구 사항에 적합하고 최적화된 질량과 높은 전력 밀도, 그리고 견고한 모터 및 기어헤드입니다.

CubeSats용 인슐린 펌프에서 나온 드라이브
CubeRover의 설계에 통합된 기술은 JPL이 다른 임무에 사용하는 기술을 기반으로 합니다. 이것이 맥슨의 전기 모터와 기어헤드가 설계에 포함된 이유 중 하나입니다. 맥슨은 현재의 퍼서비어런스 화성 로버와 인제뉴이티 헬리콥터를 포함하여 ESA와 NASA를 위해 많은 프로젝트에 참여했습니다.
맥슨은 우주 등급 X 드라이브 시스템의 출시 고객으로서 Astrobotic과도 협력했습니다. 맥슨의 고도로 규제된 의료 애플리케이션 설계에서 파생된 이 드라이브는 이 경우 일반적으로 휴대용 인슐린 펌프에 사용됩니다. 이러한 드라이브의 목표 시장은 증가하는 CubeSats 및 관련 메커니즘입니다.
-설계 문제를 해결하고 CubeRovers의 최종 목표에 따라 설계를 조정한 후 Astrobotic은 우주 여행 기술에 독특하고 가치 있는 추가 기능을 추가했습니다. 우주 과학 임무를 위해 개발된 설계를 활용하여 비용은 적게 들지만 신뢰성이 높은 설계를 만듦으로써 자신 있게 새로운 상업 시장을 개척하고 있습니다. 맥슨은 새로운 상용 우주 카탈로그 제품의 첫 번째 고객 중 하나로 Astrobotic과 협력하게 된 것을 기쁘게 생각하며, 2022년 첫 비행에 결합된 성공을 기대하고 있습니다.