maxon Story
화성에서 생명체의 흔적을 찾아서

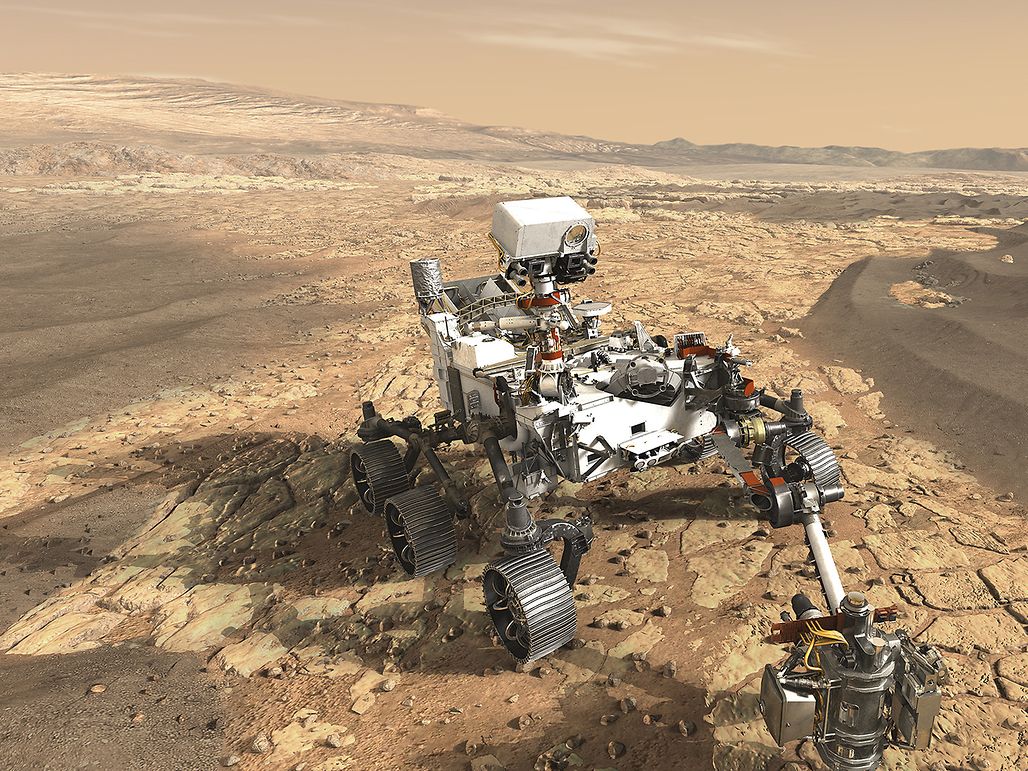
화성에는 한때 액체 상태의 물과 대기가 있었습니다. 생명체도 있었을까요? 이 근본적인 질문에 답하기 위해 NASA는 비할 데 없이 복잡한 로봇인 퍼서비어런스 로버를 보냅니다.
화성 미션은 이제 일상적인 것처럼 보일 수도 있지만, 이는 여전히 몇몇 우주선만이 온전한 상태로 이 행성 표면에 도달하는 어려운 과제입니다. 유럽우주국(ESA)은 고통스럽게도 2016년 착륙선 스키아파렐리가 이 붉은 행성에서 산산조각이 난 참사를 겪었습니니다. 그럼에도 불구하고 미국 우주국 NASA는 과거에 이미 4대의 로봇 차량을 성공적으로 화성에 보냈습니다. 그리고 2021년 2월 18일, 화성에 착륙한 다섯 번째 로버인 퍼서비어런스로 다시 한 번 역사가 쓰여졌습니다.
그러나 사람들이 화성에 착륙하려면 아직 시간이 좀 걸릴 것입니다. 바로 이때문에 현재 로봇이 작업을 수행해야 하는 이유이며 퍼서비어런스는 앞으로 많은 작업을 할 것입니다. 이 로버는 한때 물로 가득 차 있던 예제로 분화구에 착륙하여 그 지역이 한때 거주할 수 있었는지를 조사하는 임무를 맡았습니다. 이와 동시에 이 로버는 생체 서명으로 알려진 초기 생명체의 징후를 탐색할 것입니다. 이러한 목적으로 다양한 측정 장비가 장착되어 있습니다.
세 번째 임무는 기술을 발휘하여 인간이 임무를 수행하기 위한 길을 닦는 것입니다. MOXIE라 불리는 장비가 화성의 대기에 존재하는 소량의 산소를 추출할 것입니다. 이 기술은 인간이 임무를 수행하기 위해 매우 중요한 바, 왜냐하면 산소는 호흡에만 필요한 것이 아니라 연료를 만드는 데에도 사용될 수 있기 때문입니다.
생명체의 비밀
이제 가장 극적이고 기술적으로 가장 까다로운 네 번째 미션을 수행합니다. 퍼서비어런스는 최대 30개의 토양 샘플을 채집하여 이를 개별 용기에 넣고 그 용기를 밀봉한 후, 마지막으로 그 용기를 적절한 위치에 보관할 것이므로, 추후의 미션에서 그 샘플을 수집하여 지구로 다시 가져올 수 있습니다. 과학자들에게 이보다 더 좋은 것은 없습니다. 화성에서 깨끗한 샘플을 얻어 이용할 수 있는 모든 최신 기술을 사용하여 여기 이 지구에서 연구할 수 있기 때문입니다. NASA가 언급한 바와 같이, 이러한 샘플에는 우리 태양계의 생명의 기초와 기원에 대해 더 많은 것을 알려줄 잠재력이 있습니다.

드릴 헤드가 토양 샘플을 채집합니다.
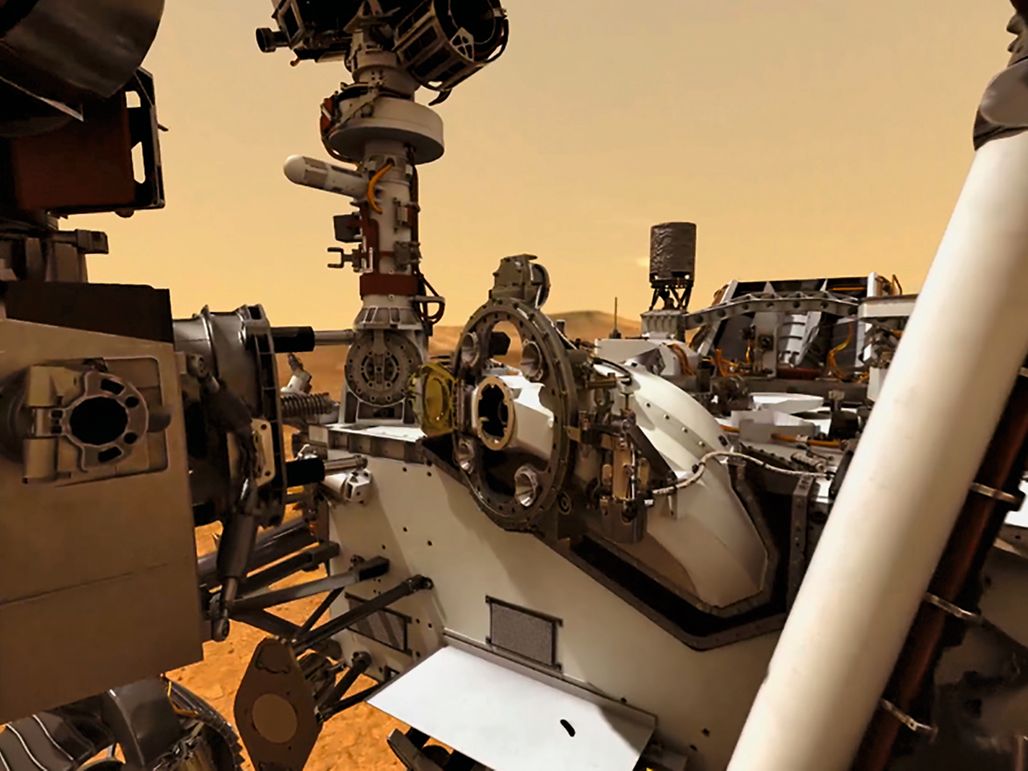
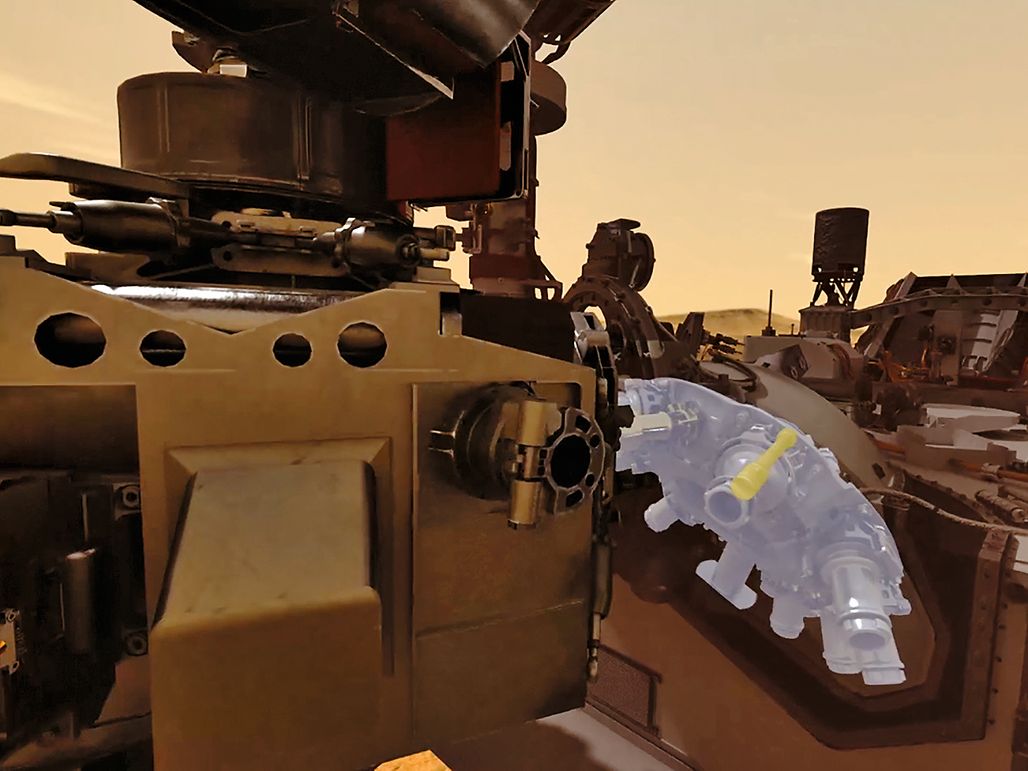
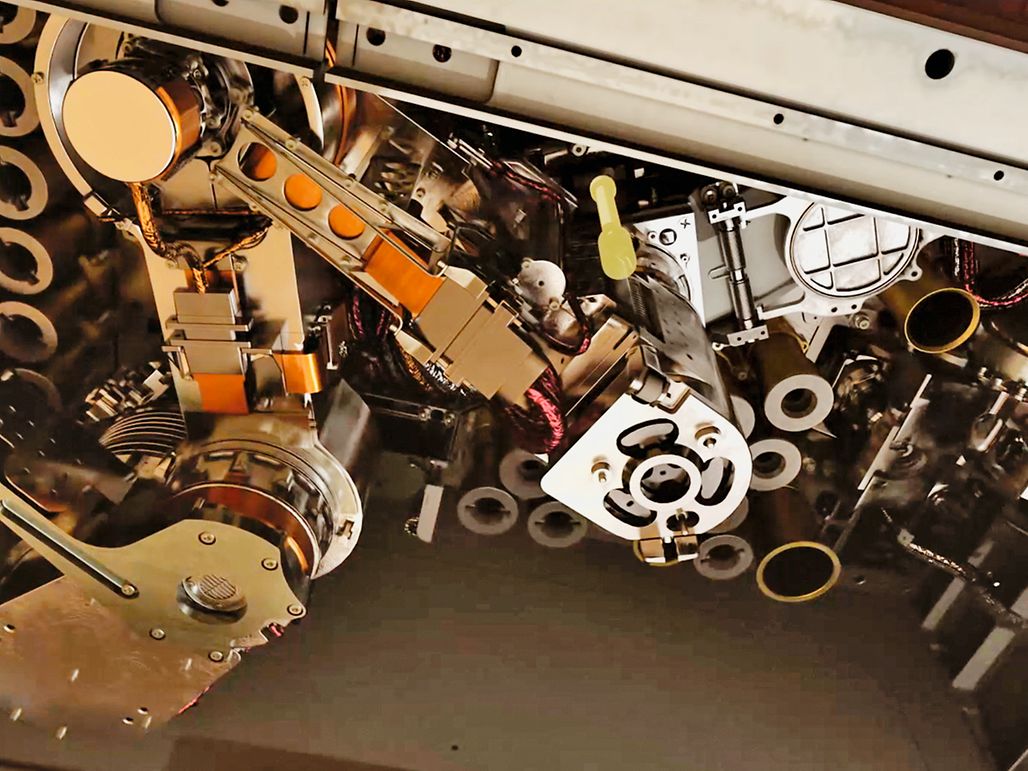
이 샘플링 작업이 성공하려면, 세 가지의 시스템이 원활하게 함께 작동해야 합니다. 먼저 로버 앞에 있는 큰 로봇 팔이 화성의 암석을 뚫고 코어 샘플을 채집한 다음 이를 회전판에 삽입합니다. 회전판은 로버 내부에서 샘플을 채집합니다. 거기에서 세 번째 시스템이 임무를 넘겨받습니다. 이 시스템은 SHA라고 불리는 훨씬 더 작은 또 다른 로봇 팔입니다. 이 팔은 회전판에서 샘플을 가져와 샘플을 용적 평가 장치 및 스캐닝 스테이션으로 이동시킨 후 밀봉 스테이션으로 이동시키고, 마지막으로 임시 저장소로 이동시킵니다. 그리고 이 모든 것은 자율적으로 수행됩니다.
바로 이 지점에서 맥슨이 등장합니다. 샘플을 처리하기 위해 여러 BLDC 모터가 사용되고 있습니다. 이러한 모터 중 일부는 스테이션에서 스테이션으로 샘플을 운반하는 SHA 로봇 팔에 설치됩니다. 샘플 튜브를 밀봉하고 그 위치를 제어할 때는 다른 모터가 사용됩니다.
성공의 열쇠는 여전히 동일합니다
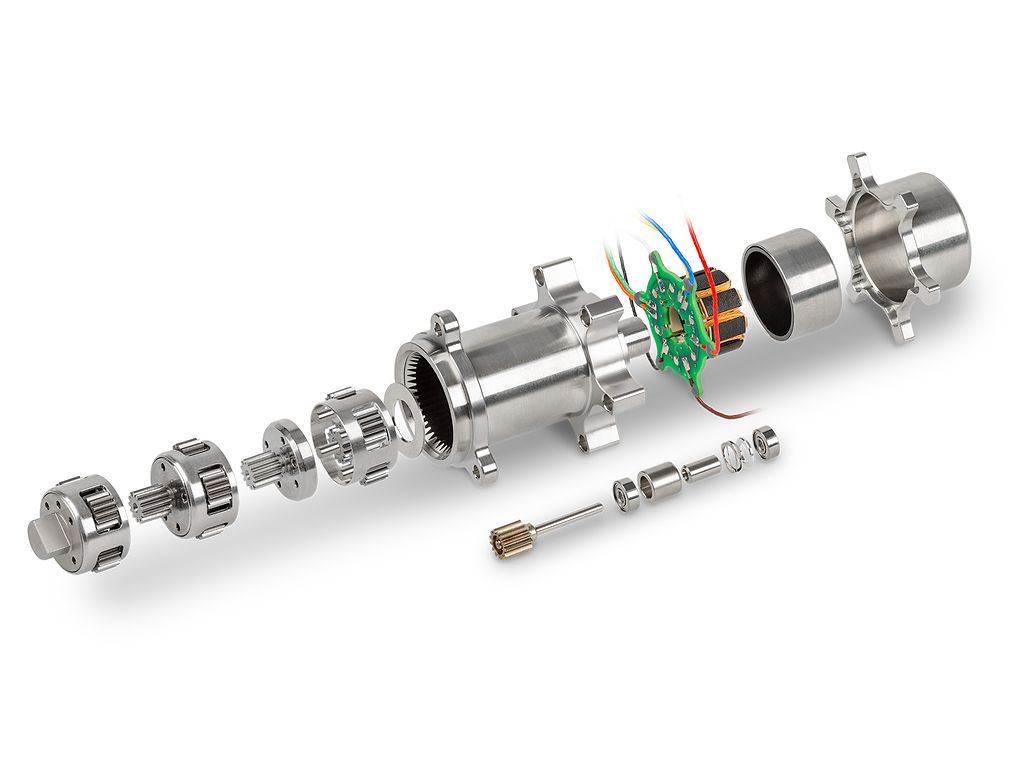
이전에 화성에서 작업했던 100개 이상의 맥슨 드라이브와 마찬가지로, 퍼서비어런스 모터는 표준 카탈로그 제품을 기반으로 합니다. 예컨대, 특히 GP 22 UP 유성 기어헤드와 결합한, 9개의 EC 32 플랫 타입의 DC 모터, 1개의 EC 20 플랫 타입을 들 수 있습니다. 물론 드라이브가 이 미션의 높은 요구 사항을 충족시킬 수 있도록 하기 위해 수정이 필요했습니다. 그럼에도 불구하고 이 드라이브의 기반은 지구에서 이루어지고 있는 모든 종류의 애플리케이션에 사용되는 모델과 다르지 않습니다.
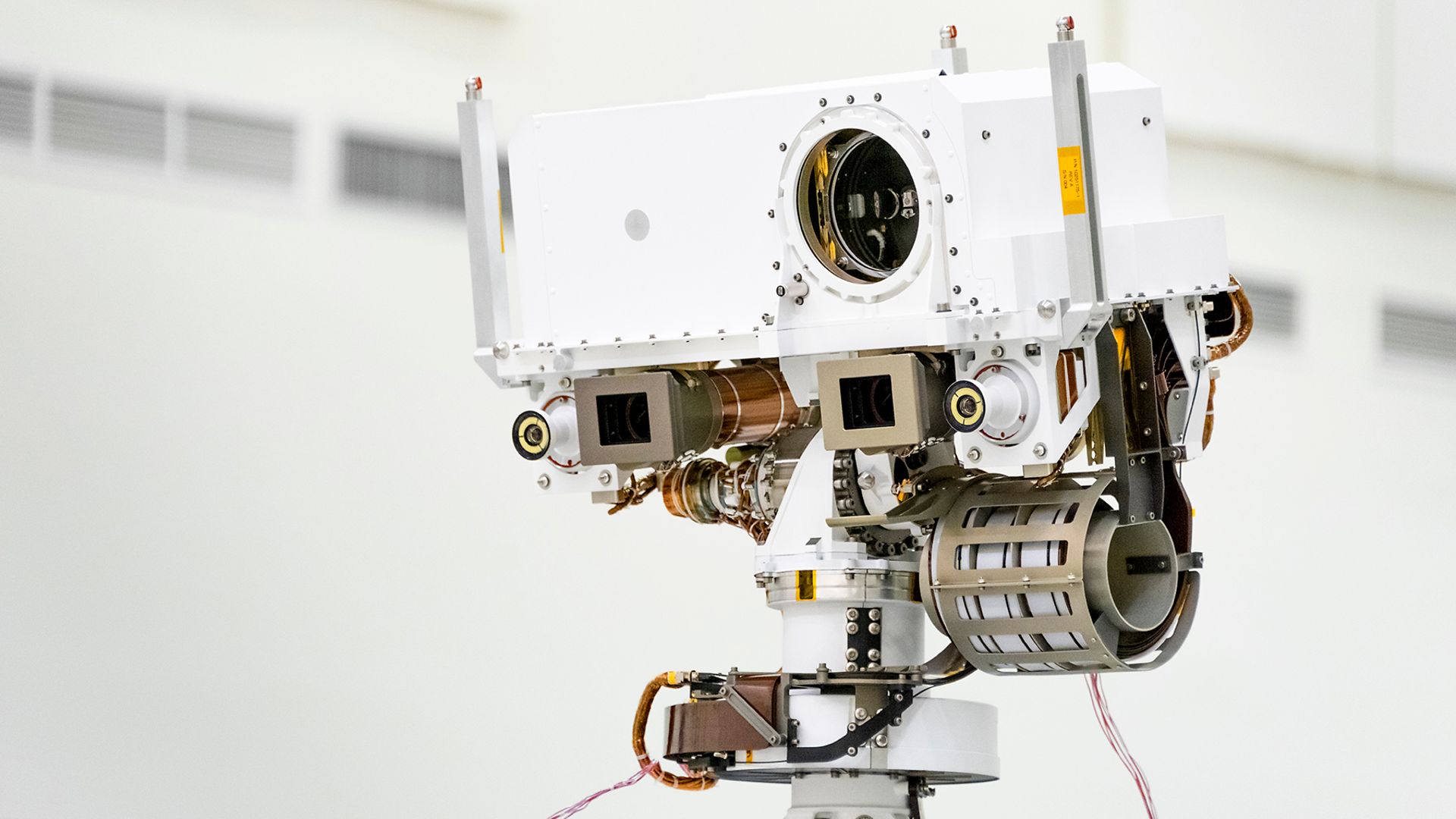
퍼서비어런스 로버에는 10개의 브러시리스 DC 모터(GP 22 UP 유성 기어헤드와 결합된 9개의 EC 32 플랫(위) 및 1개의 EC 20 플랫)가 장착되어 있습니다.

맥슨의 엔지니어들은 NASA의 모든 무인 미션을 담당하는 제트추진연구소(Jet Propulsion Laboratory: JPL)의 전문가들과 긴밀히 협력하면서 3년 동안 모터와 기어헤드를 수정하고 반복적으로 테스트했습니다. 패서디나에 소재한 이 연구소의 우주 전문가들은 전기 모터 전문 회사인 맥슨의 스위스 본사를 자주 방문했습니다. 맥슨 SpaceLab의 책임자인 로빈 필립스(Robin Phillips)는, “당사는 이번 협업을 통해 많은 것을 배웠습니다. 특히 더 높은 품질의 표준과 새로운 테스트 절차 및 과정에서 확인할 수 있습니다. "의료 분야와 같이 요구 사항이 유사한 경우가 많은 다른 산업 분야의 고객도 이러한 노하우가 주는 혜택을 받을 것입니다."라고 말합니다.
필립스와 그의 팀은 맥슨 드라이브의 기능에 상당히 많은 부분을 의존하는 퍼서비어런스의 활동에 면밀한 주의를 기울였습니다. “당사는 절대적으로 중요한 애플리케이션에 관여하고 있습니다. 당사의 BLDC 모터가 장착된 로봇 팔이 움직이지 않거나 또는 그리퍼가 작동하지 않으면 미션 전체가 실패할 것입니다.”
미션
퍼서비어런스는 화성에서 초기 생명체의 흔적(생체 서명)을 찾을 것이며 암석 및 토양 샘플을 채집하여 이것들이 지구로 귀환할 있도록 준비를 할 것입니다. 또한 인간이 수행하는 미션에 길을 닦기 위한 실험을 수행할 것입니다.
여정
발사체 아틀라스 V-401
발사장 케이브 카나버럴 공군 비행장, 플로리다(USA)
착륙일 2021년 2월 18일
착륙지 예제로 분화구
내용
계획된
미션
기간 적어도 화성력으로 1년(지구력으로 687일
무게 1025킬로그램
길이 3미터
높이 2.2미터