maxon Story
항공우주: 지상 400km 상공에 오른 맥슨

국제우주정거장(ISS)은 15년 이상 지구의 궤도를 돌고 있습니다. 이 국제 연구 기지는 미국 우주국 NASA, 러시아 우주국 Roscosmos, 유럽 우주국(ESA), 캐나다 우주국(CSA) 및 일본 우주국(JAXA)에서 공동으로 사용하고 있스니다.
2000년 11월, 취역한 이래로 총 295명의 우주 비행사가 우주정거장에서 생활하며 우주정거장을 확장하고 다양한 연구 프로젝트를 수행하고 있습니다. 2001년 이후, 63개국에서 시작된 900개 이상의 실험이 수행되었습니다. 실험에는 식물이 무중력에서 방향을 잡는 방법, 우주에서 인간의 근육과 뼈가 손실되는 이유, 인간 면역 체계의 세포가 무중력 환경에 반응하는 방법에 대한 연구가 포함됩니다. 우주 비행사의 면역 체계가 우주에서 약해진다는 사실은 이미 알려져 있습니다. 루체른 응용과학예술대학의 Biotesc 팀장인 알렉산드라 대쉬반덴(Alexandra Deschwanden)은 "실제로 노년기에 약해진 면역 체계와 비슷합니다."라고 설명했습니다. 2015년 1월 초, 팀은 SpaceX Dragon 캡슐에 탑재된 ISS에 두 개의 연구 프로젝트를 전송했습니다. 다양한 실험실 장비와 같은 기술 장비는 ISS에서의 실험에 필수적입니다. 또한 우주 비행사의 작업을 수행하거나 우주 비행사를 보조할 수 있는 로봇도 결정적인 역할을 합니다.
고유한 로코모션 시스템을 갖춘 실험 로봇
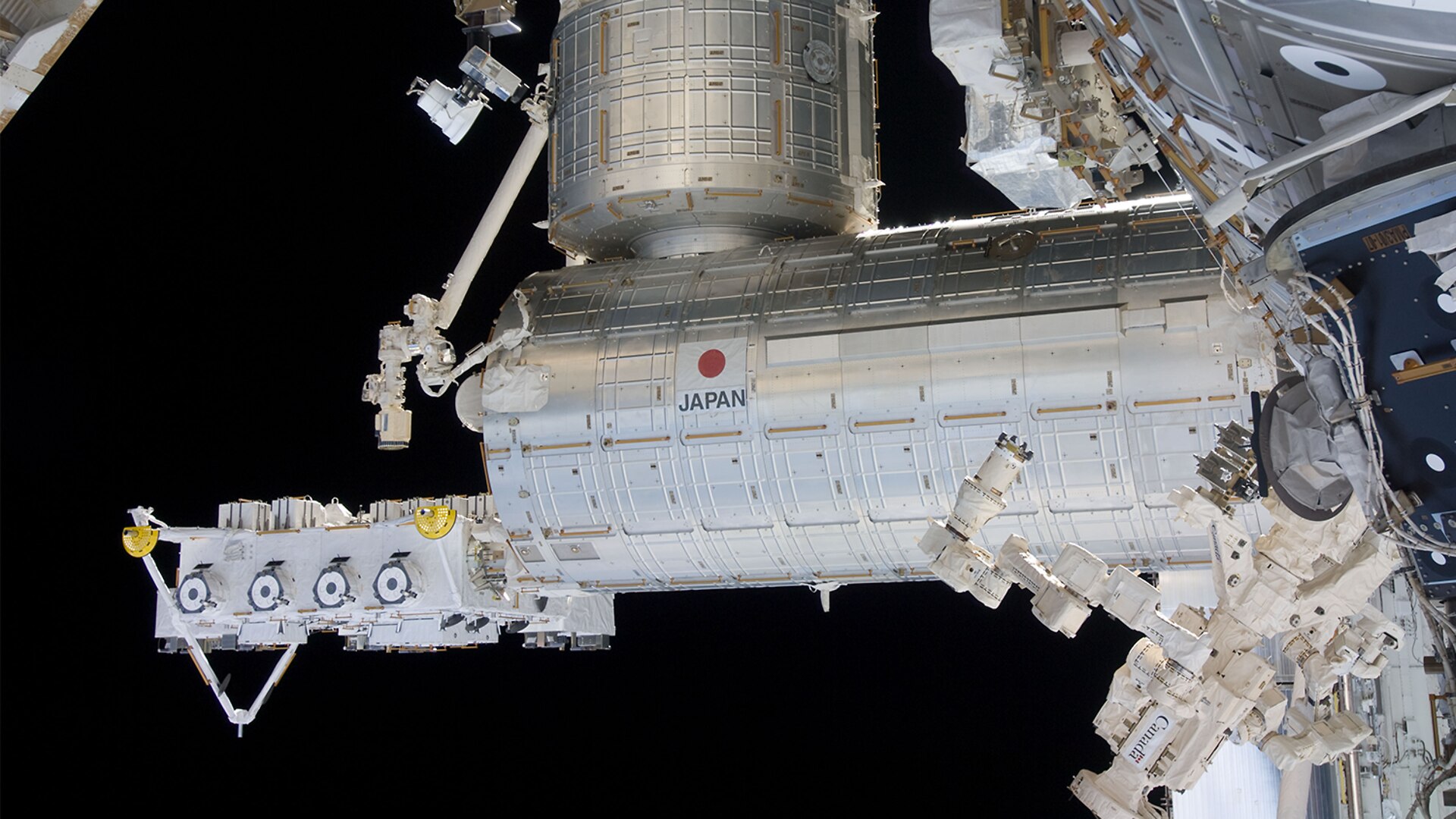
2012년부터 2013년까지 ISS의 일본 모듈인 Kibo에 "REX-J"(Robot Experiment on JEM)라는 실험 로봇이 사용되었습니다. 이 로봇은 일본 항공우주 연구개발기구(JAXA)에서 개발했습니다. 실험의 목적은 우주정거장 표면과 내부를 이동하고 화물을 이동하거나 검사를 수행할 수 있는 차세대 로봇(astrobot)의 개발이었습니다.
로봇 지원에 테더 메커니즘을 사용하는 특수 로코모션 시스템으로 로봇은 특별해집니다. 테더는 우주 비행사가 정거장 외부에서 필수 작업을 수행하는 동안 자신을 보호하기 위해 사용하는 ISS의 기존 그립 바에 연결됩니다. 모바일 로봇에는 확장 가능한 팔이 장착되어 있습니다. 팔 끝에는 테더 케이블을 서로 다른 고정 지점의 최대 세 곳에 연결할 수 있는 로봇 손이 있습니다. 이로써 로봇은 거미처럼 표면을 가로질러 이동할 수 있습니다. 로봇은 지상에서 원격 제어로 작동되어 ISS 승무원의 지원이 필요하지 않습니다.
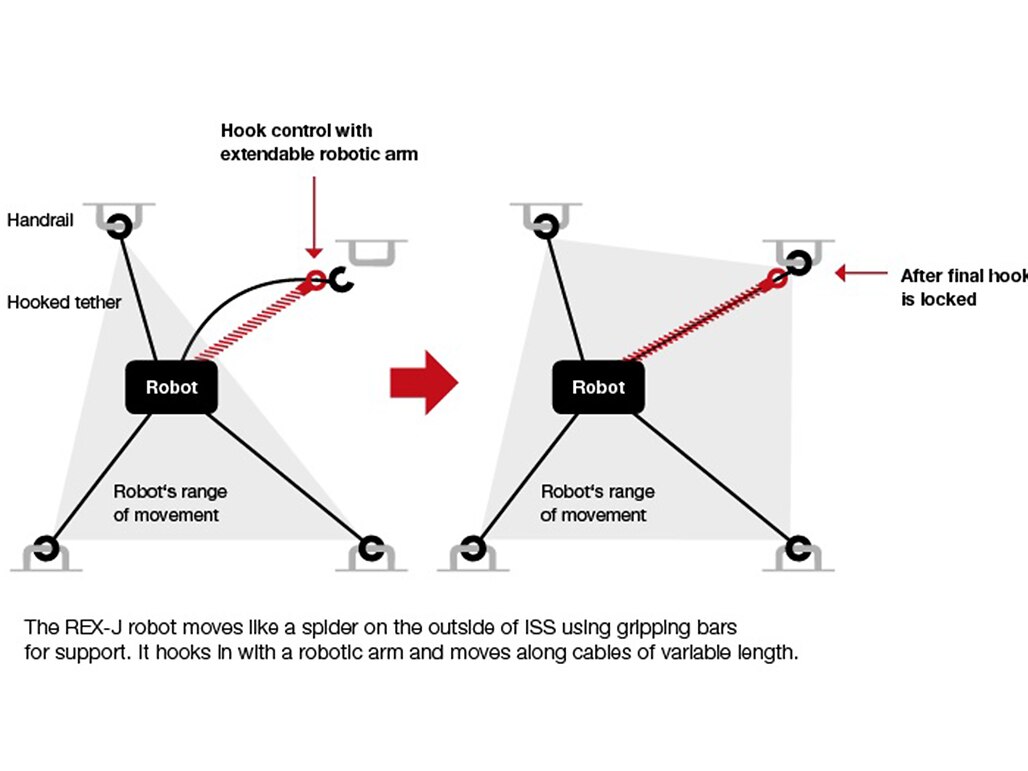
케이블로 묶여 있는 REX-J는 지지하는 데 그립 바를 사용하여 ISS 외부에서 거미처럼 이동합니다. 팔로 스스로 연결하고 다양한 길이의 케이블을 따라 이동합니다.
정밀한 움직임을 위한 강력한 드라이브 시스템
REX-J에는 맥슨에서 제작한 여러 드라이브 시스템이 장착되어 있고, 확장 가능한 로봇 팔도 장착되어 있습니다. 손목 관절에는 수직 및 수평의 두 가지 자유도가 있습니다. 손목 관절과 팔에는 브러시리스 EC-max 모터, 유성 기어헤드 및 인코더가 장착되어 있습니다.
모터용 제어 전자 장치는 로봇 팔 끝에 있습니다. 또한 추가적인 맥슨 드라이브 시스템은 로봇의 회전 메커니즘과 케이블 스풀(롤업 메커니즘)에 설치되어 있습니다.
REX-J를 통한 모든 실험은 성공적으로 완료되었습니다. JAXA는 이제 우주 정거장의 다양한 작업에 이러한 로봇의 사용을 목표로 로봇 시스템을 더욱 발전시킬 예정입니다. 그리고 외부 선체의 손상을 감지하기 위해 ISS 장치를 모니터링하고 우주 정거장의 육안 검사를 수행할 것입니다. 또 다른 장기적 목표는 우주에서 대형 구조물을 조작할 수 있는 이동식 우주 로봇을 제작하는 것입니다.

브러시리스 EC-max - 유성 기어헤드 및 인코더
로봇의 손목 관절에는 브러시리스 EC-max 모터, 유성 기어헤드 및 인코더가 장착되어 있습니다. e-shop에서 EC-max 제품 살펴보기.