maxon Story
우주의 표준 모터로 맞춤화

산업용 표준 모터와 창조적인 협업이 결합함으로써 기술지향적인 주문 제작 모터가 구현되어 고도로 정밀하고 수명이 긴 모터에 의해 화성과 그 너머로 여행할 수 있게 되었습니다.
화성의 환경이 지구에서 작동하도록 제조된 시스템을 장착할 수 없을 정도로 가혹하다는 점에는 이론의 여지가 없습니다. 화성의 대기는 지구의 대기보다 약 100배 정도 희박하지만, 구름과 바람을 만들 정도는 됩니다. 거대한 모래 바람은 종종 화성의 표면을 덮고 있는 산화철 먼지로 이루어져 있습니다. 즉, 이 먼지는 화성 대기의 영구적인 요소로서 특정 계절에는 몇 달 동안 행성을 덮을 수 있습니다. 화성의 온도는 겨울철 극지방 근처에서는 -125ºC(-195ºF), 한낮의 적도 근처에서는 20ºC(70ºF) 정도로 차이가 있습니다. 이 모든 것을 보면 조정하기 어려운 환경인 것으로 생각되지만, 시스템 설계자들은 올바른 구성 요소를 찾기 시작할 때 항상 산업용 등급 설계를 봅니다.
역사적 고찰
망원경이 발명되었던 1600년대부터 화성은 호기심의 대상이었습니다. 화성은 눈으로 보기에 별로 크지도 선명하지도 않았으므로, 화성에 대한 호기심이 커짐에 따라 이 붉은 행성을 이해하려면 결국 그곳에 가야할 필요성이 분명하였습니다. 1964년, NASA가 최초로 화성으로 접근 비행을 했을 때 거기서 Mariner 4호는 분화구가 있는 행성의 표면을 촬영하였으며, 이를 보고 과학자들은 이 행성이 다른 행성보다 지구의 달과 더 닮았다고 생각했습니다. 표면은 또한 역사상 한 지점에서 발생하여 거대한 협곡 뒤에 남긴 화산 활동의 흔적을 보여주었습니다.
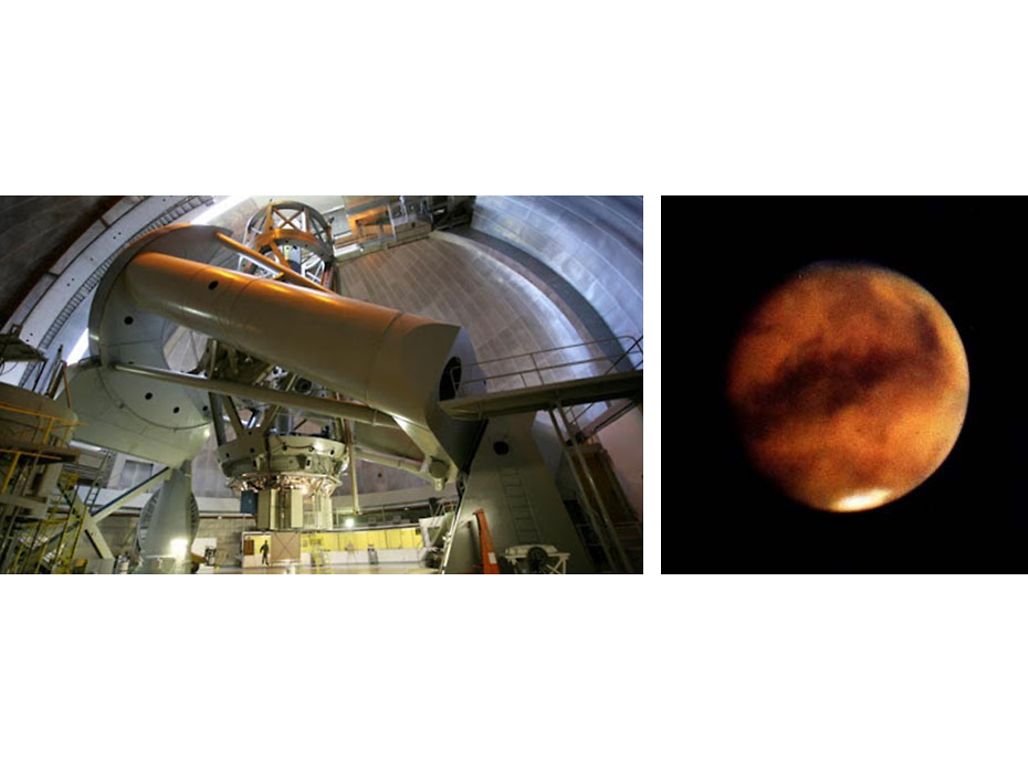
팔로마 천문대에 설치된 4.5미터의 반사 망원경으로도 화성 표면을 자세히 보기는 어렵습니다. (사진, NASA 제공)
이 정보로 인해 화성에 대한 관심이 더 커졌고 과학자들은 표면과 환경을 더욱 면밀하게 연구하기 위해 붉은 행성에 착륙하려는 노력에 박차를 가했습니다. 1970년대에 이르러 NASA의 제트추진연구소(JPL)는 화성 착륙에 성공한 최초의 우주선을 보냈습니다. Viking 1호의 착륙선은 단일 지점 표면 분석을 수행하며 생명체를 탐사하였습니다. Viking 1호는 6년 이상 고해상도 영상을 촬영하였습니다. 또한 착륙선은 로봇 팔과 특별히 고안된 생물학적 실험실을 사용하여 토양 샘플을 수집하여, 이 차거운 행성에 화산토가 있고 대기는 건조한 이산화탄소로 구성되어 있으며, 아주 오래된 강바닥과 거대한 홍수의 흔적이 있다는 것을 발견했습니다.
20년의 휴지 기간이 지난 후, 1990년대 중반 NASA는 화성 탐사의 다음 단계로 이동하고 로버와 함께 돌아올 준비가 되었습니다. 이러한 여행을 위해 NASA는 화성으로 가기에 충분히 견고한 산업용 표준 모터를 찾았습니다. 바로 이것이 맥슨의 화성 이야기가 공식적으로 시작된 시작점입니다. NASA/JPL은 이러한 조사를 시작했을 때, 모터가 미션에 더 적합하게 할 몇 가지 중요한 사양이 필요하다는 것을 알았습니다. 예를 들어, 가장 큰 문제는 모터가 저압 환경과 충격 및 진동을 견디는 것으로 발사 활동뿐만 아니라 경착륙에서도 견뎌야 하는 것이었습니다. 또 다른 문제는 모터가 작동할 때 계속 노출되는 극심한 온도 변동 주기였습니다.
1997년이 되어서야 최초의 성공적인 로버가 화성에 착륙했습니다. 소저너 패스파인더(Sojourner Pathfinder)는 일종의 시험으로서 10개의 RE 16 DC 모터를 장착하여 세미 커스텀 모터의 엔지니어링이 어떻게 작동하는지 확인했습니다. 맥슨은 우주 여행에 아주 약간만 개조한, 품질이 높은 긴 수명의 산업용 등급 모터를 제공했습니다. 그 다음 2004년 1월, 스프릿(Spirit)과 오퍼튜니티(Opportunity)라는 두 대의 로봇 지질 탐사선이 화성의 반대편에 착륙하였습니다. 이 탐사선에는 패스파인더 로버보다 훨씬 더 큰 이동 수단이 장착되어 있었으며, 주요 목표는 과학적 탐사였습니다. 각 로버에는 35대의 맥슨 DC 모터(RE 20, RE 25 모터 및 MR 엔코더)가 장착되었습니다.
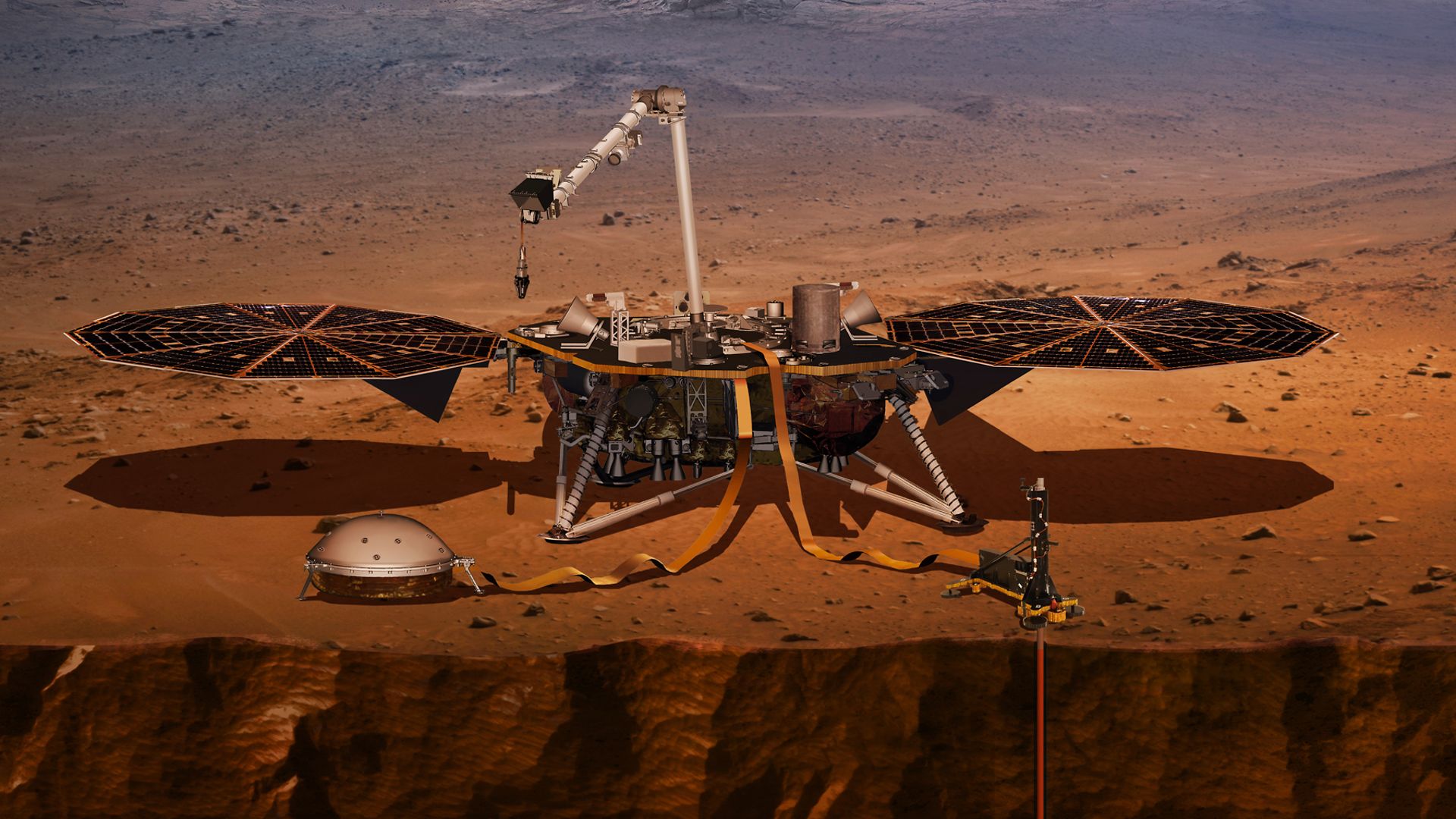
모터는 각 로버에서 다양한 애플리케이션, 예를 들어 휠의 구동, 광전지 패널의 개방, 마스트의 전개 등에 사용되었습니다. 15년 동안 45km를 이동한 후 오퍼튜니티는 자신의 미션을 종료하였습니다. 그 미션은 과학에 초점을 두었습니다. 로버는 화성에 한때 지표수가 있었는지를 찾아야 했습니다. 퇴적층 사진이 지표수가 있었다는 것을 증명하였습니다. 2018년 11월 말, 인사이트(InSight)가 화성에 착륙하여 맥슨의 신세대 브러시 DCX 모터와 맥슨의 첫 번째 기어박스를 화성에서 처음 사용했습니다.
협력과 기술의 진보
다른 산업계의 협력 회사나 NASA/JPL과 같은 우주항공 센터와 협력하면 모든 당사자들이 경험과 전문 지식을 공유하게 되고, 이로 인해 모든 레벨에서 기술적 역량이 진보하게 됩니다. 이렇게 획득한 지식으로 인해, 우주 탐사와 같은 독특한 용도로 사용하는 세미 커스텀 구성 요소에 대한 기술적 진보가 용이해질 뿐만 아니라 제조업체도 그 데이터를 이용하여 산업용 표준 제품에 사용할 기술을 진보시킬 수 있습니다. 더 큰 유연성과 더 강한 역량을 필요로 하는 화성 로버의 각 미션에서 핵심적인 것은 협력입니다.
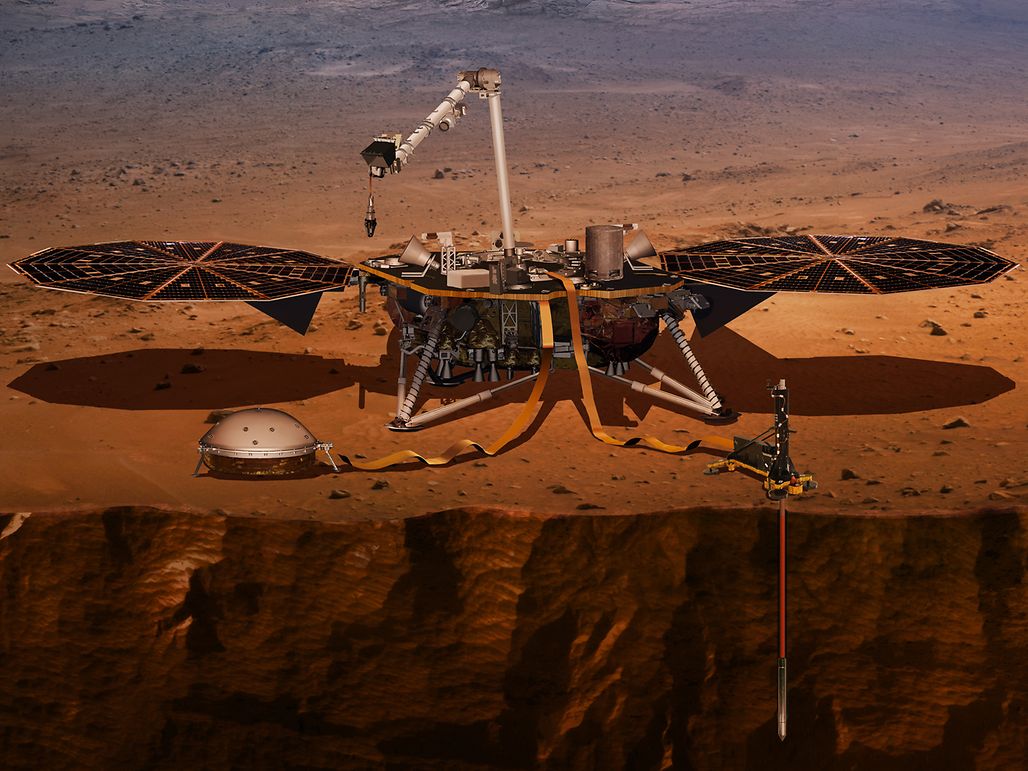
최초의 맥슨 DCX 모터와 유성 기어박스가 지면 깊숙이 온도 센서를 매립하기 위해 건설 현장 파일 드라이버와 유사한 방법을 사용하는 메커니즘에 사용되었습니다. (사진, NASA 제공)
효과적인 협력으로 참여자들은 무엇이 작동하고 또 무엇이 작동하지 않는지를, 더 나은 성능을 위해 무엇을 수정할 수 있는지, 그리고 연구를 확대하기 위한 새로운 기회를 찾는 방법을 배우게 됩니다. 예를 들어, MDA는 맞춤형 액추에이터를 전문적으로 설계하는 회사입니다. 이 회사는 맥슨의 기어박스, 브레이크 및 엔코더를 그들의 ExoMars 액추에이터에 장착하였습니다. 전체 제조 공정에 걸쳐 매우 높은 정밀도가 요구되기 때문에 MDA와 맥슨은 협력하여 모든 단일 볼트(4,000개)의 로그와 유닛 내부의 토크 값을 포함하는 특수 조립 기술을 발명했습니다. 제작된 70개의 유닛 중 12개의 유닛이 2022년 ExoMars 미션이 시작될 때 비행할 것입니다.
새로운 시스템을 위한 역량과 기회 증진에 도움을 준, 또 다른 효과적인 협력은 Flight Works와의 협력으로서, 이 회사는 약간 개조한 산업용 전기 모터를 사용하여 우주선의 추진력에 대변혁을, 즉 달과 화성 및 그 너머로의 여행을 가능하게 하는 대변혁을 일으켰던 회사입니다. Flight Works는 상업 시장과 우주항공(UAV 및 기타 우주선 추진) 시장을 위한 고전력 밀도 마이크로 펌프의 선도적 역할을 하는 회사입니다. 이 유닛은 전기에 의해 구동되는 마이크로펌프로서 대단히 높은 밀도를 생산하는 바, 이는 발사 진동과 충격 및 우주 환경에 맞추어 조정한 맥슨의 산업용 브러시리스 모터에 의해 가능하였습니다. 이 회사의 제품으로 지난 수십 년 동안 NASA/JPL의 루나 플래시라이트(Lunar Flashlight) 미션과 같은 초소형 위성(CubeSat)의 발사가 극적으로 증가할 수 있었습니다.
터보펌프식(Pump-fed) 추진 덕분에 새로운 우주 운용이 가능합니다. Flight Works는 맥슨 EC 플랫 모터 및 EC 4-극 산업용 모터를 장착함으로써 32mm 연료 펌프, 22mm 하이드라진 펌프 및 LOX/메탄 극저온 펌프를 설계하고 제조할 수 있습니다. 이러한 마이크로펌프로 터보펌프식 추진 시스템은 상당히 다양한 미션에서 운용될 수 있는 바, 여기에는 추진, 유체 관리 및 우주선 냉각 및 궤도상 연료 재보급 및 정비와 같은 다양한 작동에 펌프를 사용하는 소형 우주선이 포함되며, 미래에는 화성 귀환 작전에서도 사용할 것으로 계획하고 있습니다.
반맞춤형 산업용 모터를 우주에서 사용하는 또다른 애플리케이션에는 국제우주정거장과 연결하는 드림 체이서(Dream Chaser)와 같이 두 대의 유인 우주선을 도킹하는 데 사용하는 국제 접안 및 도킹 메커니즘(International Berthing and Docking Mechanism: IBDM)이 있습니다. 상업적인 회사에서도 맥슨의 모터를 SpaceX Cargo Dragon과 같은 우주선에 사용하고 있는 바, 이 우주선에서는 태양광 패널을 회전시키고 항해 베이 도어를 열며 정박 장치를 제자리에 잠그기 위해 10개의 EC 40 브러시리스 DC 모터를 사용합니다.

대차용 전기기계식 액추에이터, GP 32HD 기어박스와 ExoMars 휠 드라이브용 엔코더가 내장된 맥슨의 DCX 22L 장착
오늘날의 미션을 위한 기술
기술은 가혹한 환경에서 고장 없는 요구 사항으로 작동하면서 더 높은 정밀도를 제공하기 위해 설계가 한계를 넘어야 하는 경우 중요합니다. 반맞춤형 및 맞춤형 설계로써 약간 변경하여 성능에 큰 차이를 낼 수 있습니다.
이제 화성으로 가는 도정에서 NASA/JPL의 미션 화성 2020(샘플 처리 및 저장 시스템)은 큐리오시티(Curiosity)와 유사하지만 더 크고 견고한 기기 패키지를 갖춘 로버를 배치할 것입니다. 이 시스템의 목표는 샘플을 수집하고 분석하며 가장 좋은 것을 선택하며 그것을 화성 표면에 두는 것입니다. 그러면 다른 로버를 보내 그 샘플을 수집한 다음 그것을 나중에 지구로 보낼 것입니다. 맥슨 브러시리스 DC 모터는 맞춤형으로 제조되었으며 귀중한 화성 샘플을 처리하는 데 사용되는 바, 여기에는 화성 토양을 채집하는 드릴 헤드 척이 포함됩니다. 그러면 그 샘플은 로버의 회전 벨트로 이동하고, 그 벨트에서 샘플을 수납합니다. 맥슨 모터는 육안 검사, 밀봉 및 보관을 위해 샘플을 스테이션으로 이동시키는 소형 로봇 팔에도 사용됩니다.
이전의 실험적 미션과 같이 미션 화성 2020 페이로드에는 이전에 시도된 적이 없는 최초의 헬리콥터인 인제뉴이티가 포함되어 있습니다. 화성의 대기에서 헬리콥터를 운용할 수 있는지를 검증하기 위한 저비용 모의 실험인 이 미션은 지금까지의 미션 중 더욱 더 혁명적인 미션 중 하나입니다. 인제뉴이티에는 인제뉴이티를 조정하는 브러시 DC 모터(회전자의 피치를 조정하기 위한 요동판 액추에이터로서의 DCX 10S)가 6대 장착되어 있습니다. 헬리콥터에는 회전자가 2개 장착되어 있고, 각 회전자에는 모터가 3대씩 사용되므로 모터가 모두 6대 장착되어 있습니다. 이 모터는 산업용 표준 모터와 상당히 유사해 보이지만, 운행 중에 발생하는 충격과 진동을 처리하고 화성의 저압 대기에서 작동할 수 있도록 그 내부를 개조하였습니다.
우리는 향후 수년 동안 태양계를 탐사할 것이므로, 산업화된 표준 구성 요소가 거기서 우리를 안내할 우주선, 로버 및 분석 장치에 장착될 수 있다는 점을 인지하는 것이 유리합니다. 모터나 기어박스와 같은 중요한 구성 요소를 약간 개조하면, 과학자들이 다른 위성과 행성를 탐사하는 미래로 향하는 데 도움이 됩니다. 과거 수십 년 동안 모든 미션에서 학습한 내용을 수용하고 유사한 컨셉트를 산업 일반에 적용함으로써 모터 설계를 진보시킬 수 있었습니다. 기술의 진보는 설계자들이 항상 던지는 질문 “무엇을 더 달성할 수 잇는가?”에 의해 진행되는 일종의 사고 과정입니다. 회사는 더 높은 수준의 역량을 요구하는 새로운 환경에 적응할 때, 게임에서 계속 선두를 유지할 뿐만 아니라의 표준 제품도 계속 진화할 것임을 확신할 수 있습니다.
