Young Engineers Program
자율적인 농장의 작업자


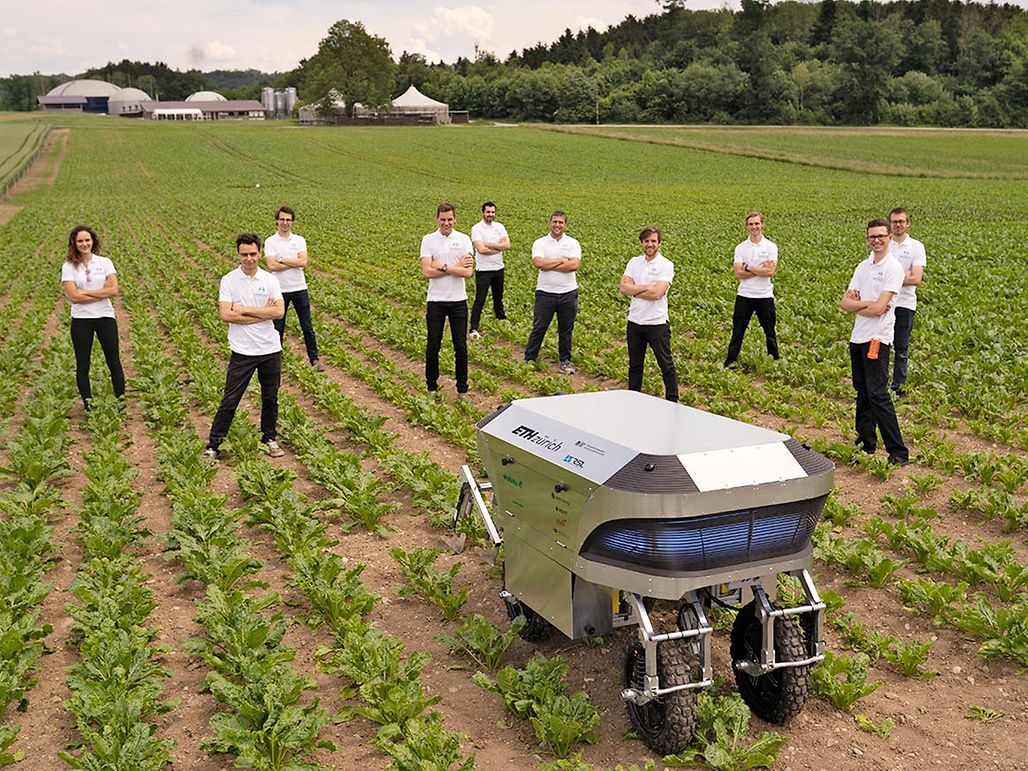
취리히 연방 공과대학(ETH Zurich)에서, 수확물 사이에서 자라는 잡초를 기계적으로 구제하는 로봇을 개발하였습니다. “Rowesys”는 원격제어를 통해 편리하게 작동을 시작하며, 이 로봇으로 인해 제초제가 필요하지 않습니다.
위기에 처한 종의 다양성. 과부하가 걸린 생태 시스템. 지하수와 대기에 너무 많은 농약: 세계는 긴급하게 더 지속가능한 농업을 필요로 합니다. 이러한 변환은, 증명된 바와 같이, 혁신적인 방법이 증가할 때 가능합니다. 즉, 취리히 연방 공과대학에서 개발한 로봇 제초 시스템(Robotic Weeding System), 줄여서 Rowesys와 같은 혁신적인 장비가 필요합니다. 이 프로젝트는 잡초와 곰팡이 및 해충을 죽이는 화학물질을 사용하지 않는다고 수익이 없어지는 것은 아님을 보여줍니다. Rowesys의 시제품은 상당히 집중적인 잡초 방제가 필요한 사탕무에서 사용하기에 특히 적합합니다. 다른 솔루션은 예를 들어, 보다 더 정밀한 살포법을 통해 농약 사용의 감소에만 집중하는 데 반하여, ETH 로봇은 제초제를 더 이상 쓸모없게 합니다. 이 로봇은 경작물을 심은 두둑 사이의 고랑에서 잡초를 뽑고 경작지의 끝에 가서 회전한 후, 다음 고랑으로 이동하여 그 작업을 계속합니다. 자율 로봇은 경로에 있는 진흙이나 돌멩이도 처리할 수 있습니다. 취리히 ETH의 Robotics, Systems, & Control에서 석사 과정을 밟으며 이 프로젝트를 처음 시작한 파스칼 리버헤어(Pascal Lieberherr)는 식품 가공 분야에서 실습을 하는 동안 식품 사슬에 여러 가지 문제가 있다는 것을 깨닫게 되었습니다. 그는 현재 다음과 같은 핵심적인 문제에 관심을 가지고 있습니다: 우리는 어떻게 우리 행성의 자연에 부담을 주지 않고 인류를 먹여 살릴 수 있는가?
효율적인 경작
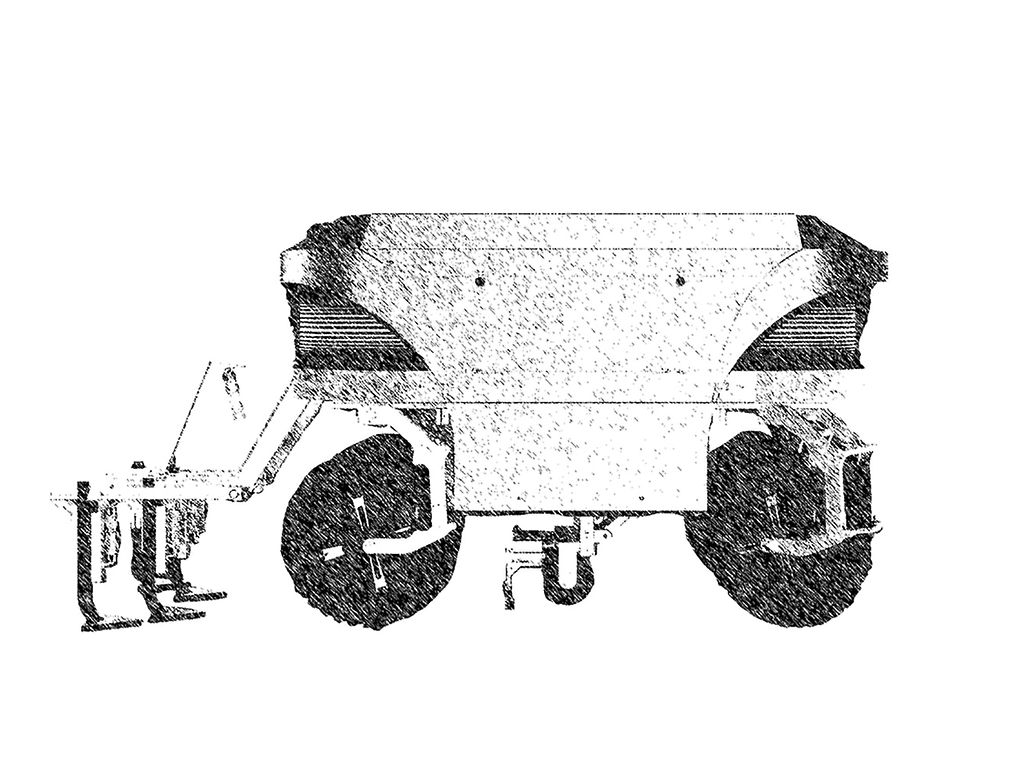
취리히 ETH의 기계공학부 및 전기공학부 학생과 북서 스위스 응용과학예술 대학(FHNW)의 산업디자인과 학생으로 구성된 팀은 견고한 로코모션(locomotion) 컨셉트를 개발하였습니다. 이 차량은, 농작물의 열 사이의 간격이 좁으므로, 소형 변속기를 가지고 있는 네 개의 전기 스쿠터 허브 모터로 구동됩니다.
RE 50 DC 모터 Rowesys의 각 휠 축은 양쪽에서 180도 회전할 수 있으며 감속용 GP 62 유성 기어헤드와 엔코더가 있는 RE 50 DC 모터로 구성된 구동 장치에 의해 제어됩니다. 이 모터는 높은 효율성을 제공하며, 에너지 효율적이고 상당히 강력합니다.

Rowesys 프로젝트에 대한 더 상세한 정보:
rowesys.ethz.ch
기계식 스프링 댐퍼 시스템에 의해, 개별적으로 제어할 수 있는 휠은 항상 지면과 접촉하며 쟁기날이 묻힌 경우에도 계속 안정적으로 작동합니다. 이는 한편으로는 오작동하게 되면 수확물이 손상되고 수확량이 감소될 수 있기 때문에 중요합니다. 다른 한편으로는, 균형이 잘 잡힌 중량 분배로 인해 국소적인 토양 다짐이 감소합니다.
공정의 안정성 외에도 사용자 친화성은 파스칼 리버헤어와 그의 팀이 우선적으로 고려한 또 다른 측면이었습니다. 따라서 Rowesys에는 GPS가 필요하지 않으며 원격으로 편리하게 제어할 수 있습니다. 로봇의 미래 버전에서는 로봇이 스스로 농장에서 경작지로 이동하고 또 되돌아올 수 있도록 계획하고 있습니다. 이 로봇에는 강력한 배터리 두 개가 장착되어 있어 여덟 시간 작동할 수 있습니다.
바람, 질병 및 해충
두 개의 시각 센서가 농장에서의 탐색을 관리합니다. 전면 카메라가 농작물이 있는 두둑을 감지하는 동안 토양을 향하는 센서는 잡초와 농작물을 구별합니다. 이러한 목적으로 특별히 프로그래밍된 소프트웨어가 녹색 구역용 전면 카메라의 영상을 분석하여 농작물 두둑의 방향을 감지합니다. 토양 영상을 분석하기 위한 학습형 소프트웨어를 개발할 계획입니다. 그 목적은 소프트웨어의 용도를 옥수수와 같은 다른 작물로 넓히는 것입니다.
소프트웨어 개발에는 몇 가지 과제가 있었습니다. 그러한 과제 중 하나는 나뭇잎을 수 초내에 새로운 위치로 날려 보내는 강한 돌풍이었습니다. 그러면 시스템은 신속하게 변화하는 그 영상을 즉시 다시 해석하여 그에 따라 반응해야 합니다. 병든 작물이나 해충이 침범한 농작물의 감지 구역에서도 작업이 필요합니다.
2020년 여름, 로봇을 소개했을 때 이 프로젝트에 대한 열광적인 반응을 보고 파스칼 리버헤어는 지능형 농업 로봇을 계속 발전시켜야 한다고 확신하였습니다. 2021년 6월, 로봇 평가를 위한 농산식품 경진대회(ACRE)가 개최될 것입니다. 이러한 계획은 EU 연구 및 혁신 프레임워크 프로그램(EU Framework Program for Research and Innovation)인 호라이즌(Horizon)이 후원합니다. 여기에서 농업용 모바일 로봇은 서로 경쟁하며 Rowesys가 국제 무대에서 자신의 강점을 보여줄 수 있는 완벽한 기회입니다.
ETH 팀에게는 로봇이 사용자 친화적이라는 점이 중요하였습니다. 이 로봇에는 GPS 탐색이 필요하지 않으며, 개발자는 경작지에서 농장으로 스스로 되돌아올 수 있을 향후 버전도 계획하고 있습니다.
Young Engineers Program
맥슨은 Young Engineers Program(YEP)을 통해 제품을 할인하여 공급하고 기술적 자문을 제공하며 혁신적인 프로젝트를 지원합니다.
신청하십시오.여기.
이미지 저작권
슈테펜 임마누엘 덴커(Steffen Imanuel Denker), 맥슨