Young Engineers Program
민첩한 협동 로봇

라발 대학교의 캐나다 연구원들은 인간의 민첩성과 어울릴 수 있는 새로운 협동 로봇을 개발하고 있습니다.
협동 로봇(코봇)은 복합 프로그래밍 인터페이스를 사용하지 않고 작업을 가르칠 수 있도록 인간 사용자에 의해 직접 조작 가능한 로봇 팔입니다. 상업적으로 사용할 수 있는 코봇은 직렬식 아키텍처를 기반으로 합니다. 코봇은 감속비가 큰 액추에이터를 사용하기 때문에 기계적으로 역주행할 수 없습니다. 힘/토크 센서는 인간 사용자에 의해 로봇에 적용되는 힘에 대한 반응을 제공합니다. 결과적으로, 이런 로봇은 인간의 민첩성을 따라가지 못해 인간 주도 작업에 다소 부자연스럽게 사용됩니다.
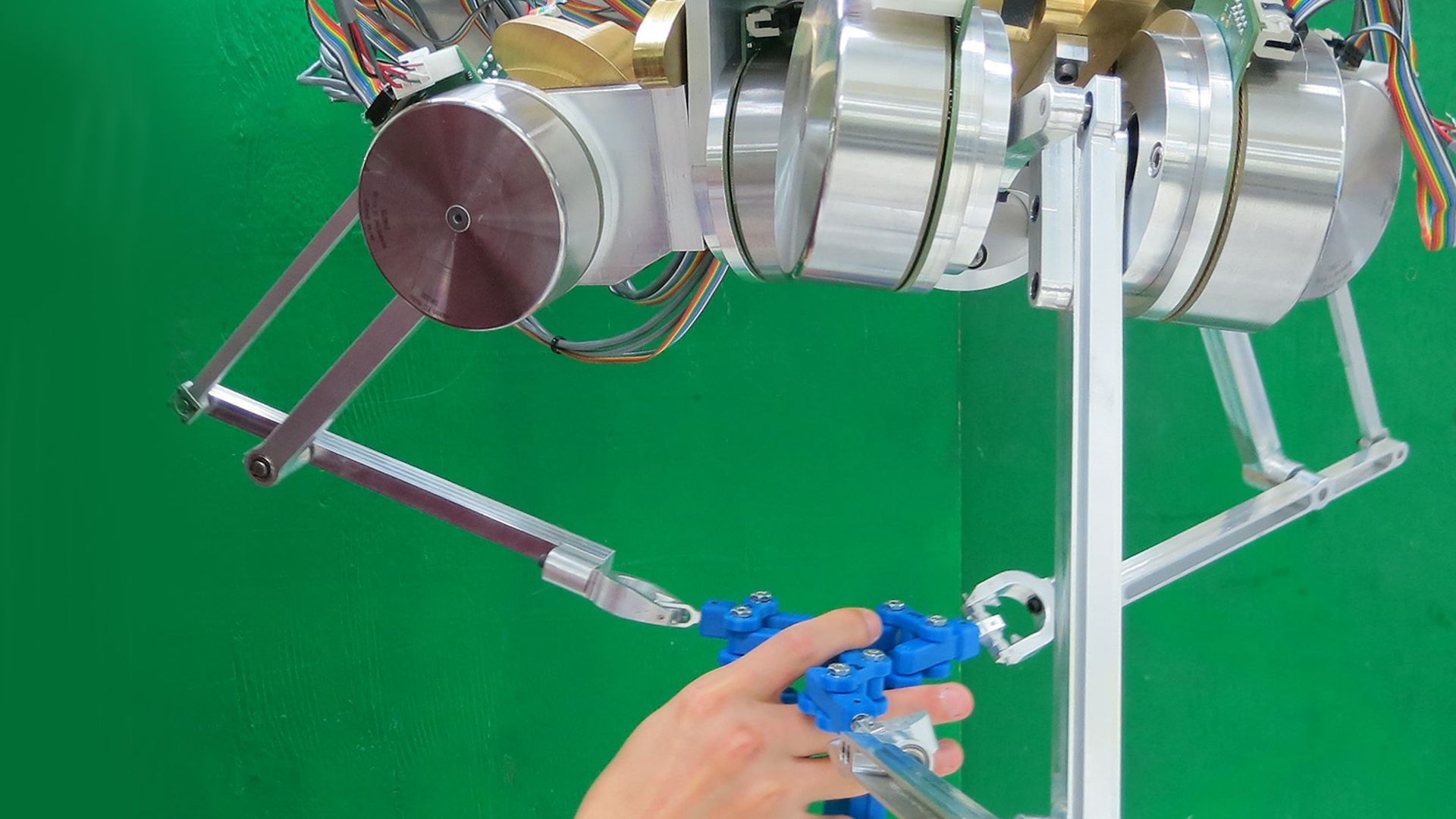
따라서 라발 대학교의 연구원들은 다르게 접근했습니다. 연구원들은 이동 관성을 상당히 줄이고 액추에이터를 베이스 위나 근처에 배치하도록 하는 병렬식 아키텍처 기반의 협동 로봇을 제안합니다. 그러면 다이렉트 드라이브 액추에이터를 사용할 수 있어 로봇은 기계적으로 역주행할 수 있고 힘/토크 센서에 의존할 필요가 없습니다. 기어헤드가 없는 상태에서 충분한 토크를 제공하기 위해 하이 토크 EC 90 플랫 모터가 사용됩니다. 평형추는 액추에이터의 정적 토크를 줄이기 위해 로봇의 다리에 장착되어 있습니다. 로봇의 기계적 역주행으로써 수월하고 직관적인 물리적 인간-로봇 상호 작용이 가능합니다. 게다가 매우 간단하고 효과적인 컨트롤러를 사용할 수 있습니다. 또한, 로봇의 아키텍처는 추가적인 이점으로서 그리퍼를 기본 액추에이터에서 작동시킬 수 있도록 합니다. 로봇은 역주행 가능성, 낮은 이동 관성 및 다이렉트 드라이브 트랜스미션으로 인해 인간의 팔에 대한 민첩성을 따라갈 수 있습니다. 따라서, 이 로봇은 특히 함께 제공되는 비디오에서 볼 수 있듯이 수월하고 직관적이며 민첩한 고대역폭의 물리적 인간-로봇 상호 작용에 적합합니다.