maxon Story
ALLEX, 휴머노이드 로보틱스의 새로운 패러다임


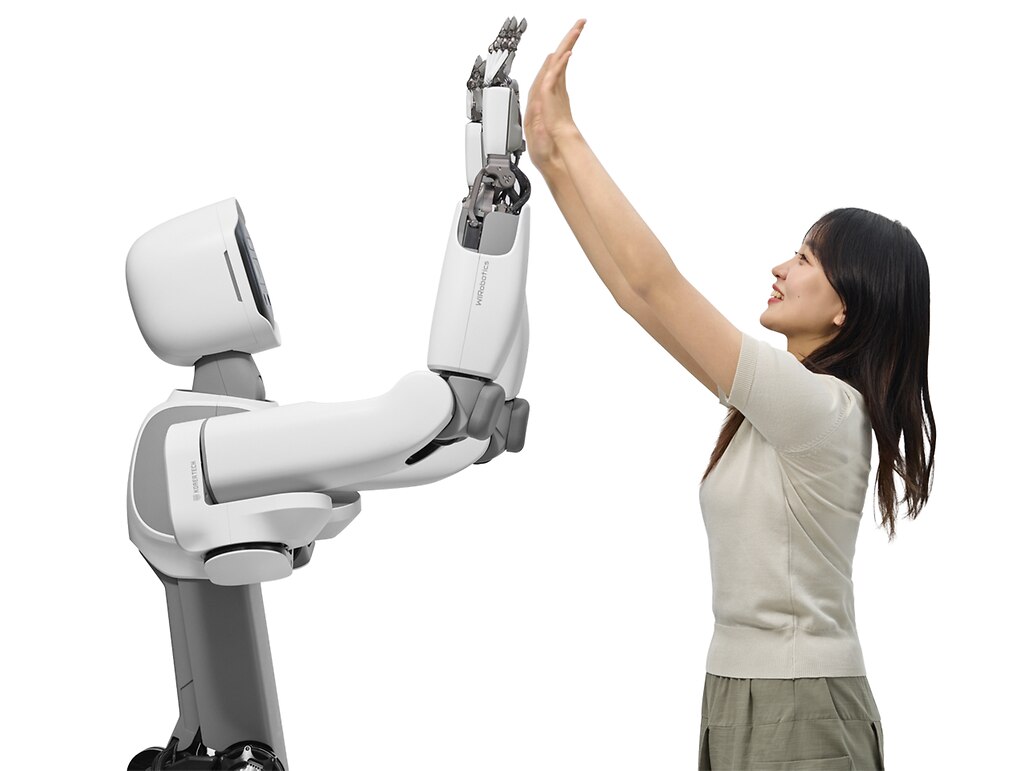
손끝으로 100g의 힘을 감지하고, 훅 그립으로 30kg 이상의 하중을 들어 올릴 수 있는 ALLEX는 인간과 같은 섬세함, 강인함, 그리고 안전한 상호작용을 결합해 휴머노이드 로보틱스의 개념을 새롭게 정의합니다.
위로보틱스는 “Technology for People, Enhancing Quality of Life” 라는 비전 아래, 인간 중심의 안전하고 정밀한 로봇 시스템을 개발하는 휴머노이드 및 웨어러블 로봇 전문 기업입니다.
한국기술교육대학교 내에 위치한 위로보틱스 선행연구소인 로봇 이노베이션 허브를 통해 연구자와 산업 파트너가 함께 새로운 로보틱스 기술을 실증, 공유하고 있으며 특히 정밀 구동 기술 분야의 선도 기업인 맥슨과 전략적 파트너십을 구축해 핵심 기술의 공동 개발과 검증을 진행하고 있습니다. 또한 국내외 유수 연구 기관들과 협력해 기술 고도화를 지속적으로 추진하고 있습니다.
이러한 철학을 바탕으로 위로보틱스는 인간 수준의 조작 능력과 상호작용을 구현하기 위한 휴머노이드 로봇 ALLEX를 개발했습니다. ALLEX는 ‘움직임을 넘어 상호작용으로’ 라는 새로운 연구 패러다임을 제시하며 피지컬 AI 연구 플랫폼으로 처음 공개되었습니다.
ALLEX의 핵심 목표인 인간 수준의 민첩함, 정밀성, 안전한 상호작용을 실현하기 위해서는 단순한 모터를 넘어선 고성능 드라이브 시스템이 필요했습니다. 이를 위해 위로보틱스는 맥슨의 고정밀 모터와 자체 개발한 감속기를 주요 구동부에 적용했습니다.
접촉을 다시 생각하다
수십 년 동안 로봇은 접촉을 피하도록 설계되어 왔습니다. 기존 로보틱스에서는 물리적 접촉을 충돌(collision), 즉 피해야 할 위험 요소로 여겨왔습니다. 하지만 인간은 접촉 속에서 살아갑니다. 우리는 악수를 하고, 함께 물건을 나르며, 부딪히면 즉시 반응합니다.
위로보틱스가 개발한 ALLEX는 이러한 관점을 완전히 바꾸었습니다. 접촉을 피하는 대신 접촉을 감지하고 활용하는 것을 핵심 원리로 삼았습니다. 그 결과, 접촉은 더 이상 실패가 아닌 능력의 원천이 되었습니다.
기존의 로봇은 물리적 접촉을 충돌로 인식했지만 ALLEX는 그 접촉을 성능 향상의 요소로 적극 활용합니다.
이러한 발상의 전환은 ‘피하는 접촉’에서 ‘활용하는 접촉’으로의 변화를 바탕으로 ALLEX를 단순한 휴머노이드가 아닌, 상호작용 중심 로보틱스의 새로운 세대로 자리매김하게 할 핵심입니다.
팔 – 가볍고 유연한 백드라이버블(Backdrivable) 구조
위로보틱스가 목표로 한 수준의 백드라이버빌리티는 상용 구동 장치의 조합만으로는 구현할 수 없었습니다. 이에 자체 구동 시스템을 개발하여 마찰은 1/10, 관성은 1/24로 줄였습니다.
ALLEX의 팔은 사람의 팔처럼 민첩하게 움직이면서도 안전하고 유연하게 작동할 수 있도록 최적의 백드라이버블 구조로 설계되었습니다.
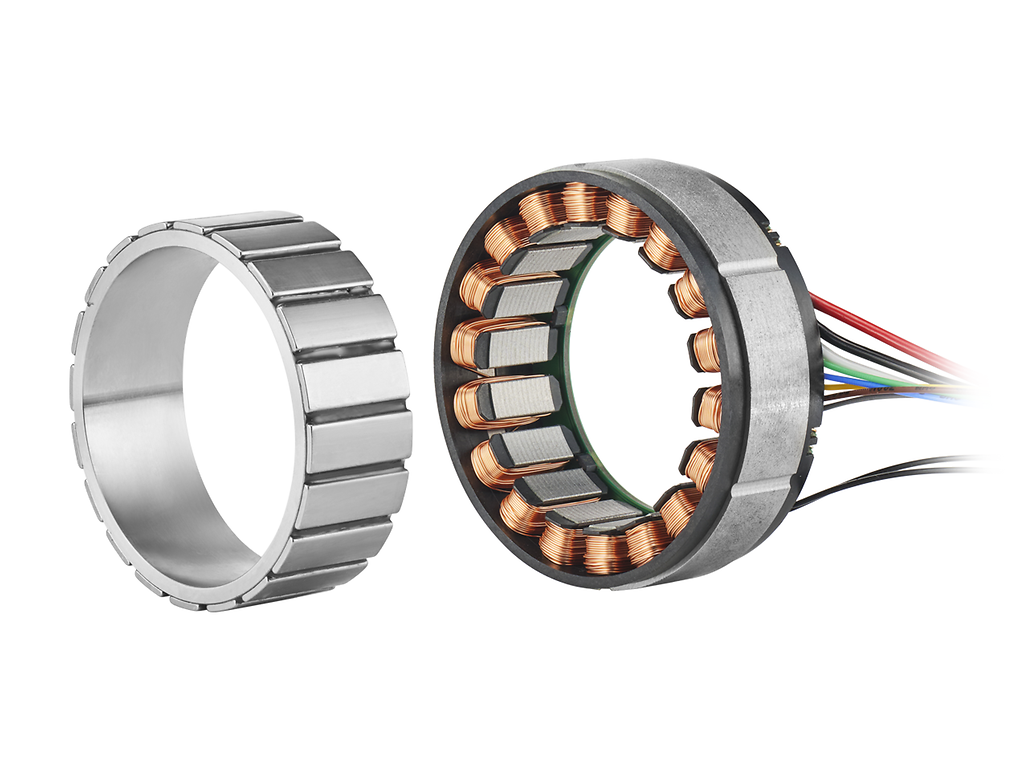
이 과정에서 맥슨이 국내에서 개발, 생산한 초슬림 프레임리스 모터가 핵심적인 역할을 했습니다. 이 모터는 고토크를 제공하면서도 얇고 컴팩트한 구조로 설계되어, 제한된 공간에서도 효율적인 구동 시스템을 구현할 수 있었습니다. 또한 위로보틱스가 자체개발한 감속기의 조합으로 낮은 마찰과 작은 출력축 회전관성을 구혐함으로써 팔의 민첩성과 역구동성이 한층 강화되었습니다.

7개의 구동기 중 5개는 어깨와 가까운 팔 윗 부분에 배치해 팔 끝이 더 가볍고 빠르게 움직일 수 있도록 설계했습니다. 그 결과, 어깨 아래 전체 무게는 약 5kg에 불과하며 속도와 안전성, 그리고 강도를 모두 갖춘 팔이 완성되었습니다.
손 – 인간과 같은 섬세함을 컴팩트하게
ALLEX의 손은 20개의 관절과 15개의 자유도를 지니며 사람의 손 크기와 비슷합니다. 고출력 구동기는 팔의 전완부에, 미세 동작을 담당하는 소형 구동기는 손바닥에 배치함으로써 강한 힘과 섬세한 동작을 효율적으로 배분하여 담당하도록 하였습니다.


이러한 기술적 설계로 ALLEX의 손은 정밀함과 힘을 동시에 구현합니다.
- 별도의 촉각 센서 없이 100g의 외력 감지
- 손끝에서 최대 40N의 힘 생성
- 3kg 하중을 안정적으로 조작
- 훅 그립으로 30kg 이상 들어올리기 가능
그럼에도 손은 가볍고 컴팩트하여 인체 비율을 유지하면서 차세대 성능을 실현했습니다.
허리와 목 – 수동 중력 보상 (Passive Gravity Compensation)
ALLEX의 허리와 목은 각각 두 개의 자유도를 가지며, 수동 중력 보상 메커니즘이 적용되어 있습니다. 허리 시스템은 팔의 자세나 하중에 관계없이 상체 전체의 무게를 균형 있게 보상합니다. 기계적으로 중력을 상쇄함으로써 관절이 필요로 하는 토크를 최소화하여 안전하고 유연하며 에너지 효율적인 움직임을 가능하게 합니다. 이러한 수동 설계 방식은 ALLEX가 자연스럽게 접촉에 반응할 수 있게 하면서도 장시간 동작 시 모터 부하를 줄여줍니다.

시스템 통합 – 실시간 전신 제어
총 48개의 자유도를 가진 ALLEX는 EtherCAT 기반의 고속 통신과 위로보틱스의 맞춤형 컨트롤러를 통해 작동합니다. 이 시스템은 손끝에서 몸통까지의 움직임을 실시간으로 동기화하여 전체적인 일체감과 유기적 제어를 제공합니다.

ALLEX의 손은 인간 수준의 조작 능력을 폭넓게 보여줍니다. 섬세한 마이크로 조립과 정교한 봉제 작업부터 고하중 드릴링, 병뚜껑 열기, 일상적인 동작까지 정밀함과 속도, 그리고 힘의 균형을 하나의 로봇 플랫폼에서 구현했습니다. 20개의 관절과 15개의 자유도, 그리고 탁월한 역구동성(Backdrivability)을 갖춘 구동 시스템을 통해 ALLEX는 인간 손의 섬세함을 완벽히 재현하며 정밀한 제어와 빠른 동작, 강한 힘을 부드럽게 오가며 구사합니다. 이 시스템은 하나의 플랫폼 안에서 인간 손의 정교함과 자연스러운 반응성을 완성합니다.
ALLEX – 피지컬 AI 연구를 위한 살아있는 플랫폼
ALLEX는 단순히 인간과 같은 손재주를 보여주는 로봇이 아닙니다. 미래 세대의 피지컬 AI연구를 위한 표준 플랫폼으로 설계되어, 대학과 첨단 연구 기관이 로봇이 단순한 움직임을 넘어 상호작용의 물리학(Physics of interaction)을 학습할 수 있도록 지원합니다. 연구자들은 강화학습, 모방학습, 그리고 최신 로봇 파운데이션 모델을 결합하여 하나의 통합된 시스템에서 다양한 접촉 기반 작업을 실험할 수 있습니다.
섬세한 그립부터 강력한 힘까지
ALLEX의 고자유도 손은 미세 조립이나 단추 꿰매기 같은 섬세한 작업부터 L렌치를 이용한 볼트 체결, 망치질과 같은 고충격 동작까지 자유롭게 수행합니다. 정밀한 제어와 강한 힘이 조화를 이루는 구조는 고하중에는 강하지만 세밀한 제어가 어려운 산업용 로봇과, 정밀하지만 내구성이 약한 연구용 로봇 사이의 오랜 격차를 메워 줍니다. 기계적으로 투명하고 외부 힘에 부드럽게 반응하는 구동기를 기반으로 ALLEX는 팔, 손목, 손가락 전 구동계에서 실시간 반응성을 유지합니다. 이를 통해 하드웨어를 교체하지 않고도 서브밀리미터 수준의 미세 작업부터 순간적인 충격 제어까지 연속적이고 정교한 제어 능력을 테스트할 수 있습니다.
모션을 넘어, 상호작용 중심의 로보틱스로
오늘날 로보틱스 연구는 강화학습, 모방학습, 그리고 VLM, VLA 기반의 로봇 파운데이션 모델 등으로 빠르게 확장되고 있습니다. 그러나 대부분의 접근은 여전히 움직임 중심에 머물러 있으며, 진정한 상호작용 기반 지능을 탐구하기 위한 물리적 토대는 부족했습니다.
ALLEX는 바로 그 공백을 메웁니다. 정밀한 힘 제어와 감지, 그리고 인간과의 물리적 접촉을 안정적으로 다룰 수 있는 하드웨어를 기반으로, AI가 단순한 동작이 아닌 상호작용 그 자체를 학습할 수 있는 환경을 제공합니다.
새로운 휴머노이드의 방향
ALLEX는 단순한 로봇을 넘어 인간–로봇 협업의 미래를 제시합니다. 로봇이 배우고 적응하고 상호작용하는 방식을 새롭게 정의하며 피지컬 AI 연구의 살아있는 플랫폼으로 자리잡을 것이라 믿고 있습니다.
그 중심에는 위로보틱스의 혁신적인 설계와 제어 기술이 있으며, 이를 뒷받침하는 맥슨의 정밀 드라이브 솔루션이 ALLEX의 완성도를 한층 높였습니다. 손끝의 세밀한 움직임부터 균형 잡힌 허리, 유연한 목의 동작까지 이 모든 정밀함은 위로보틱스의 기술력과 협력 파트너들과의 시너지가 만들어낸 결과로, 정확성, 신뢰성, 섬세한 반응성을 모두 실현했습니다.
이러한 기술적 기반 위에서 위로보틱스는 맥슨과의 지속적인 기술 협력 관계를 바탕으로 로보틱스의 새로운 시대를 열어가고 있습니다. 두 기업은 단순한 부품 공급을 넘어, 인간과 로봇이 조화롭게 공존하고 상호작용하는 미래를 함께 만들어가고 있습니다.
ALLEX는 이제 움직이는 로봇을 넘어, 배우고 느끼며 인간과 진정으로 상호작용하는 로봇으로 진화하고 있습니다.