maxon Story
소형 협동로봇용 스마트 그리퍼


소형 정밀 장치에 적합한 모터를 제공하는 것은 어려울 수 있습니다.
협동로봇의 성장과 확산으로 인해 일반적으로 다양한 그리퍼와 엔드 이펙터에 대한 수요가 증가했습니다. 보다 더 까다로운 애플리케이션 중 하나는 소형 부품의 자동 게이징 및 측정입니다. 이러한 장치는 고해상도 위치제어 장치에 자동화 애플리케이션의 의사결정 소프트웨어에 지속적으로 사용할 수 있는 2.5마이크로미터의 낮은 해상도를 제공해야 합니다. 이것은 뉴 스케일 테크놀로지스(New Scale Technologies)의 한 사업부인 뉴 스케일 로보틱스(New Scale Robotics: NSR)가 최신 그리퍼 중 하나를 설계하고 제조하기로 결정한 이유입니다.
초소형 협동로봇용으로 제작된 NSR-PG-10-20, 정밀 평행 그리퍼는 자동화를 위한 내장형 펌웨어와 함께, 모터, 센서, 정밀 베어링 가이드, 드라이브 및 전자 제어장치를 하나의 장치에 통합하는 메카트로닉 시스템입니다. 설계 과정에서 NSR은 이러한 그리퍼에 의해 유니버설 로보틱스(Universal Robotics: UR)의 소형 코봇 라인에 몇 분 내에 설치 가능한 플러그 앤 플레이 통합을 제공하기로 결정했습니다. NSR-PG-10-20은 사용자에게 최고의 정밀도로 초소형 크기와 질량을 제공합니다. 모든 전원 및 제어 회로는 로봇 도구 포트와 슬립 링을 통해 위치하므로 외부 케이블이나 전자 보드가 필요하지 않습니다. 그리퍼를 설치하려면, 이를 간단히 UR 로봇의 툴 플랜지에 장착하고 단일 케이블을 UR 툴 I/O 포트에 연결하면 됩니다. 동작 명령은 로봇의 8핀 툴 I/O 인터페이스를 통해 수신됩니다. 외부 전선이나 별도의 전자 장치가 필요하지 않아 케이블의 간섭 없이 UR 로봇의 손목 관절이 360도로 완전히 또는 무한하게 회전할 수 있습니다.

NSR-PG-10-20 정밀 평행 그리퍼는 고정밀 작동을 위해 맥슨의 EC-20 플랫 모터를 통합합니다
정밀 평행 그리퍼는 복잡한 소형 부품 취급, 측정, 분류 및 조립용으로 높은 정밀도를 제공하고 자동화된 계측 애플리케이션을 위해 특별히 내부 절대 위치 센서를 통합합니다. 그리퍼는 긴 수명 주기 동안 반복적으로 빠르고 정밀한 움직임을 제공해야 했습니다.
정밀 모션 제어
설계 과정에서 NSR은 정밀 평행 그리퍼의 요구 사항을 조사하고, 맥슨에서 설계하고 제조한 EC-20 플랫 브러시리스 DC 모터(BLDC)를 선택했습니다. 이 모터에는 최대 5개의 권선 타입과 내장형 인코더가 있습니다. 다중 출력을 사용할 수 있으며 모터는 높은 안정성과 조용한 작동을 제공합니다. 이 모터는 기본적으로 15그램에 불과한 매우 가벼운 무게와 3.75mN-m의 높은 연속 토크 때문에 선택하게 되었습니다. 모터의 뛰어난 토크 대 질량 비율은 NSR-PG-10-20이 16:1의 적당한 기어비를 사용하면서 ±3~10N의 조절 가능한 파지력을 달성할 수 있음을 의미합니다. 그리퍼는 20mm의 범위로 구동되는 대칭 타이밍 벨트 드라이브를 통합합니다. 또한 작동 전압, 전류 및 토크는 내부 로봇 전원 공급 장치와 일치합니다.
BLDC 로터리 모터는 회전을 선형 동작으로 변환시키는 타이밍 벨트로 기어 감속을 구동합니다. 별도의 각도 센서는 모터 샤프트의 각도를 측정하는 데 사용되며 별도의 디지털 전자 장치는 작동에 필요한 3상 구동 전류를 발생시키는 데 사용됩니다. 이 메커니즘은 소형 부품을 잡고 놓는 데 사용되는 그리퍼 핑거를 열고 닫는 데 필요한 직선 동작을 제공합니다. 그리퍼 핑거는 애플리케이션에 따라 부품의 외부 또는 내부에서 잡을 수 있습니다. 위에서 언급한 내장 센서를 통해 그리퍼의 선형 부품 측정 해상도는 2.5마이크로미터입니다. 그리퍼의 개폐 속도는 20mm/초이고 개폐 범위는 20mm입니다.
NSR의 CEO인 데이비드 헨더슨(David Henderson)은 말합니다. “설계할 때 까다로운 부분은 폐쇄형 루프의 위치 및 속도 특성을 제공하면서 그리퍼가 소형 크기, 높이 및 낮은 질량을 유지하도록 하는 것이었습니다. 로봇의 내부 전원을 사용할 수 있는 저전력 및 전류 모터를 찾는 것도 어려운 일이었습니다.” 맥슨의 EC-20 플랫은 고객이 가장 필요로 하는 제품을 제공하는 데 필요한 수단을 NSR에게 제공하면서 설치 및 작동도 용이하도록 했습니다. 기계적 통합은 가장 쉬운 부분이었습니다. 이 회사는 각도 센서 없이 EC-20 플랫을 사용하고 그 대신 정류를 위한 자체 외부 각도 센서를 제공했습니다. 헨더슨은 “앞으로 저희는 제품 범위를 확장하여 더 높은 파지력을 가진 그리퍼와 이에 상응하는 더 높은 질량 및 파워 모터, 더 긴 파지 범위, 내장된 힘 측정 센서를 포함하여 힘 제어의 개선을 기대하고 있습니다.”라고 말했습니다.
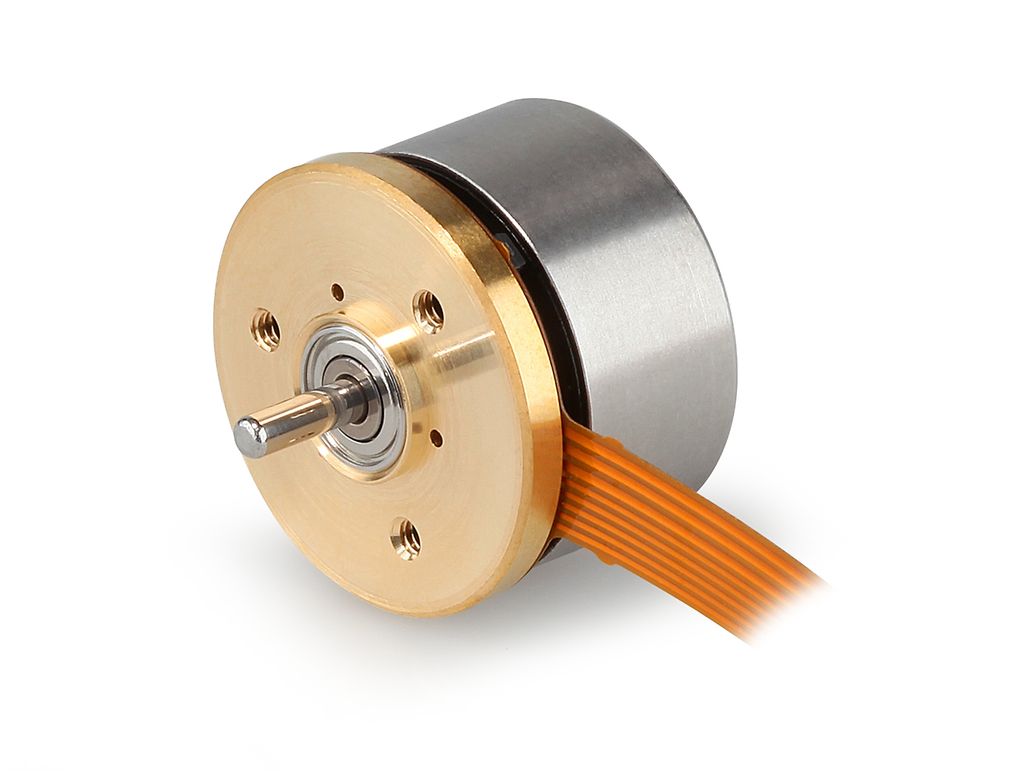
맥슨의 EC-20 플랫은 초소형 크기의 모터에 NSR-GP-10-20 정밀 평행 그리퍼의 요구 사항을 가장 잘 처리할 수 있는 적절한 토크의 기능을 제공합니다
그리퍼에는 교체 가능한 핑거가 장착되어 있습니다. NSR-PG는 사용자가 바로 작업할 수 있도록 공장에서 핑거가 설치된 상태로 배송됩니다. 또한 그리퍼는 유니버설 로보틱스의 UR3, UR5, UR10 로봇은 물론 회사의 최신 e시리즈 로봇 라인인 UR3e, UR5e 및 UR10e 로봇과 함께 사용할 때 티칭 가능한 핑거의 위치를 규정합니다. 핑거를 원하는 위치로 수동 이동하고 티치 펜던트를 사용하여 설정. 이것은 티치 모드에서 UR 로봇을 사용해 본 사람이라면 누구나 익숙한 과정입니다. 위치는 0.01mm까지 반복할 수 있습니다. 사용자의 공작물에 맞는 핑거 개폐 위치를 설정함으로써 사용자는 각 작업에 대한 핑거 동작(스트로크)을 최소화하여 시간과 에너지를 절약할 수 있습니다. 전반적으로 사용자는 NSR-PG-10-20을 통해 반복적이고 노동집약적인 측정 및 품질 관리 작업을 자동화할 수 있으므로 UR 코봇은 계측 애플리케이션에 강력한 도구가 됩니다.
이러한 특정 애플리케이션에 적합한 모터를 찾는 일은 어려운 작업일 수 있습니다. 초소형 패키지 모터에 최신 기술을 적용함으로써 NSR은 고객의 요구를 충족할 수 있었습니다. 맥슨의 EC-20 플랫은 NSR-PG-10-20 정밀 평행 그리퍼의 설계 및 제조에서 핵심 구성품이었습니다.
더 상세한 정보: newscalerobotics.com