maxon Story
Una pinza inteligente para pequeños robots colaborativos


Encontrar el motor adecuado para pequeños dispositivos de gran precisión puede ser una tarea complicada.
Con el crecimiento y la proliferación de los robots colaborativos, ha aumentado la necesidad de disponer de una amplia variedad de pinzas y efectores finales. Una de las aplicaciones más desafiantes es la calibración y medición automatizada de piezas pequeñas. Este tipo de dispositivo debe permitir el posicionamiento de alta resolución, con resoluciones de hasta 2,5 micras que deben estar disponibles en todo momento para el software de toma de decisiones en aplicaciones de automatización. Este fue el motivo por el que New Scale Robotics (NSR), una división de la empresa New Scale Technologies, decidió diseñar y fabricar una de sus últimas pinzas.
Creada para los pequeños robots colaborativos, la pinza paralela de precisión NSR-PG-10-20 es un sistema mecatrónico que en un único dispositivo integra un motor, sensores, guías de rodamientos de precisión y electrónica de motor y control, además del firmware integrado para la automatización. Durante el proceso de diseño, NSR decidió que la pinza debía disponer de una conexión plug-and-play para su instalación en cuestión de minutos en la línea de pequeños cobots de Universal Robotics (UR). La NSR-PG-10-20 ofrece a los usuarios una máxima precisión con un tamaño y una masa mínimos. Todos los circuitos de potencia y control están realizados a través del soporte herramientas y los anillos colectores del robot, por lo que no se requieren cables externos ni placas electrónicas. Para instalar la pinza basta con montarla en la brida para herramientas del robot de UR y conectar el único cable al puerto de E/S para herramientas del UR. La recepción de los comandos de movimiento se realiza a través de la interfaz de E/S para herramientas de 8 pin del robot. No se requieren cables externos ni componentes electrónicos independientes, lo que permite un giro de 360 grados o rotación infinita de la articulación de la muñeca del robot de UR sin que interfiera cable alguno.

La pinza paralela de precisión NSR-PG-10-20 incorpora el motor EC 20 flat de maxon para un funcionamiento de alta precisión
En la pinza paralela de precisión hay instalado un sensor absoluto de posición especialmente diseñado para aplicaciones automatizadas de metrología, lo que permite manipular, medir, clasificar y ensamblar con gran precisión piezas muy pequeñas. Era necesario que las pinzas pudieran moverse de forma rápida y precisa una y otra vez durante una larga vida útil.
Control de movimiento de gran precisión
Durante el proceso de diseño, NSR investigó a fondo los requisitos de su pinza paralela de precisión y eligió el motor DC EC 20 flat brushless (BLDC), diseñado y fabricado por maxon. Este motor ofrece hasta cinco tipos de bobinado, así como encoders integrados. También hay disponibles múltiples salidas de potencia y los motores ofrecen una gran estabilidad y un funcionamiento silencioso. Los principales argumentos para elegir estos motores fueron, fundamentalmente, su peso, de tan solo 15 gramos, así como su alto par continuo de 3,75 mN-m. La excelente relación par-peso permite que la NSR-PG-10-20 alcance una fuerza de agarre ajustable de ±3 a 10 N con una modesta relación de transmisión de 16:1. La pinza incorpora una correa dentada simétrica con un rango de 20 mm. Además, la tensión, la corriente y el par de funcionamiento se combinan perfectamente con la alimentación de energía interna del robot.
El motor rotativo BLDC traslada la reducción del engranaje a una correa dentada que convierte la rotación en un movimiento lineal. Un sensor de ángulo independiente se utiliza para medir el ángulo del eje del motor, mientras un sistema electrónico digital independiente genera la corriente trifásica necesaria para el funcionamiento. Este mecanismo proporciona el movimiento lineal necesario para abrir y cerrar los dedos de la pinza, que se utilizan para agarrar y soltar piezas pequeñas. Los dedos de la pinza son capaces de agarrar una pieza por dentro o por fuera, dependiendo de la aplicación. Gracias al sensor integrado anteriormente mencionado, la resolución lineal de la pinza para la medición piezas es de 2,5 micras. La velocidad de apertura/cierre de la pinza es de 20 mm/s y el rango de apertura/cierre es de 20 mm.
Según David Henderson, CEO de NSR: «Lo más complicado del diseño fue mantener el tamaño, la altura y el peso reducidos de la pinza, ofreciendo al mismo tiempo las características de velocidad y posición de bucle cerrado. Fue todo un reto encontrar un motor de baja potencia y corriente que nos permitiera utilizar la alimentación interna del robot». El EC 20 flat de maxon permitió a NSR lograr el equilibrio entre cumplir las expectativas de los clientes y ser al mismo tiempo fácil de instalar y utilizar. La integración mecánica no supuso problema alguno. La empresa optó por un motor EC 20 flat sin sensor de ángulo. En su lugar, utilizó su propio sensor de ángulo externo para la comunicación. «En el futuro nos gustaría ampliar nuestra gama de productos y ofrecer pinzas con fuerzas de agarre superiores (con los correspondientes motores con mayor masa y potencia), mayores rangos de agarre y sensores de fuerza integrados para mejorar el control de la fuerza», comenta Henderson.
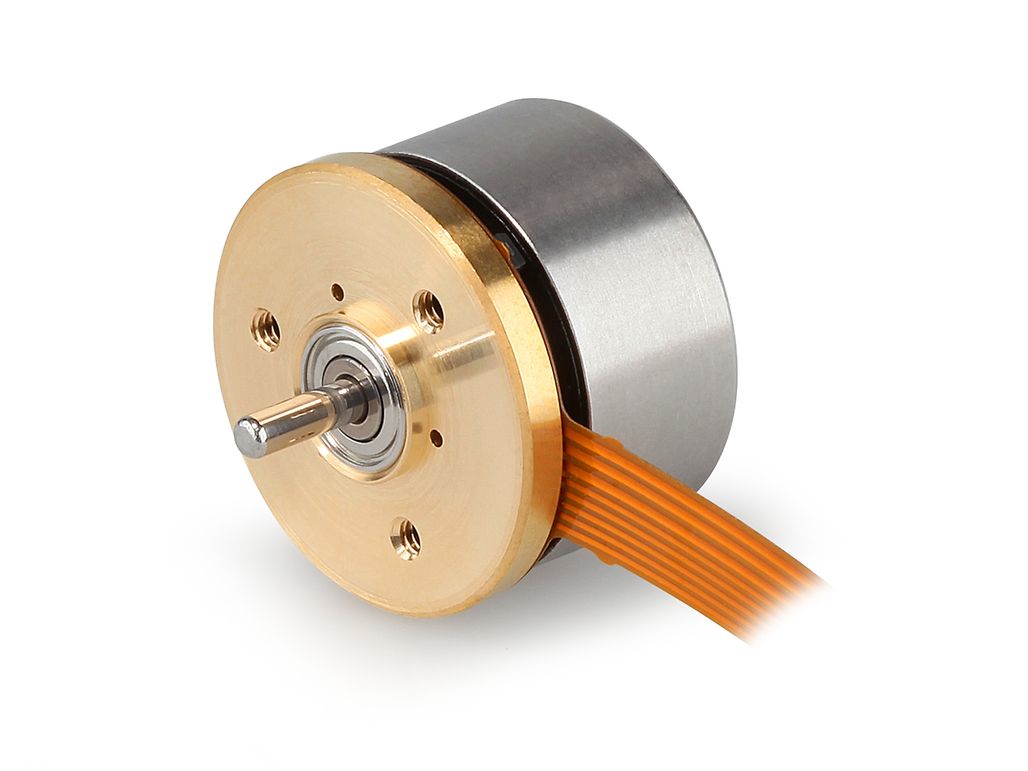
El EC 20 flat de maxon es el motor con las dimensiones y las características de potencia perfectas para la pinza paralela de precisión NSR-GP-10-20
La pinza está equipada con dedos intercambiables. La NSR-PG se suministra con los dedos instalados de fábrica, por lo que los usuarios pueden ponerse manos a la obra inmediatamente. La pinza también permite programar las posiciones de los dedos cuando se utiliza con los robots UR3, UR5, UR10 de Universal Robotics, así como en los robots UR3e, UR5e y UR10e de la última serie eSeries Robots de la empresa. Para ello, basta con mover manualmente los dedos a la posición deseada y guardar el ajuste utilizando el Teach Pendant, un proceso que le resultará familiar a cualquiera que haya utilizado un robot de UR en modo de programación. La posición tiene una repetibilidad de 0,01 mm. Ajustando las posiciones de apertura y cierre de los dedos para hacerlas coincidir con la pieza de trabajo de un usuario, este puede reducir al máximo el movimiento de los dedos (carrera) para cada operación, lo que ahorra tiempo y energía. Lo más importante es que la NSR-PG-10-20 permite al usuario automatizar mediciones repetitivas y laboriosas, así como tareas de control de calidad, por lo que el cobot de UR se ha convertido en una herramienta de alto rendimiento para aplicaciones de metrología.
Encontrar el motor adecuado para aplicaciones tan específicas puede ser una tarea complicada. Disponer de la última tecnología en el motor más pequeño ha hecho posible que NSR cumpla los requisitos de sus clientes. El EC 20 flat de maxon es uno de los componentes fundamentales del diseño y la fabricación de la pinza paralela de precisión NSR-PG-10-20.
Para más información: newscalerobotics.com