Expert Blog
Selección de encoders, primera parte: Propiedades

¿Cómo seleccionar el encoder adecuado para un aplicación? Este blog ofrece varias respuestas.
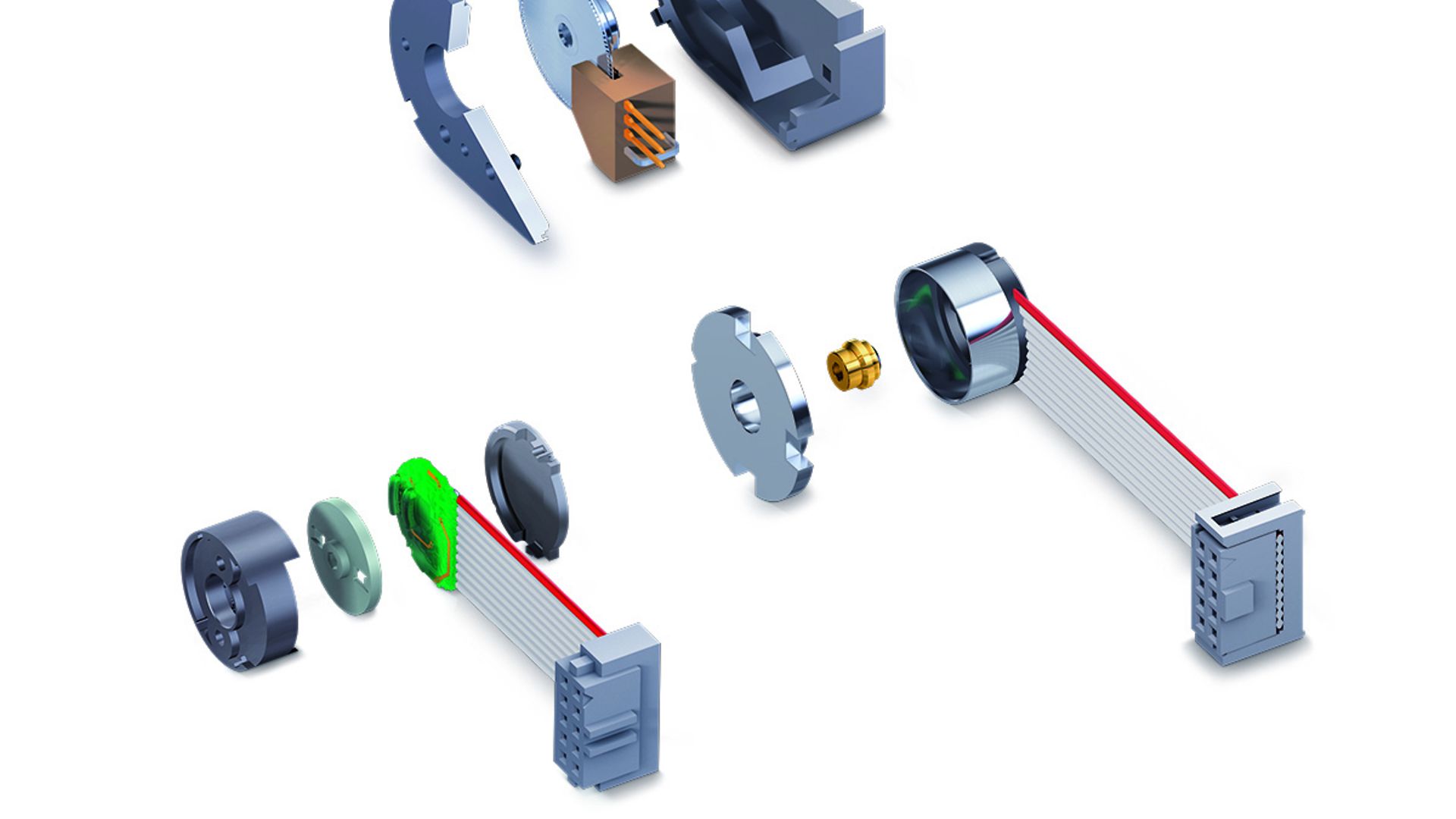
El sensor de retroalimentación que puede ser adecuado para muchas aplicaciones con motores pequeños es el encoder incremental digital. Esta serie de blogs empieza reconsiderando las propiedades más importantes de un encoder antes de entrar en detalles acerca de la selección para aplicaciones de control de posición y velocidad.
¿Cuáles son los requisitos típicos?
Cada aplicación es diferente. La tarea principal puede ser el control de posición o de velocidad. El nivel de precisión en el control de velocidad o posición puede ser muy diferente y debería definirse antes de elegir el encoder. El control de velocidad a baja velocidad (menos de 100 rpm) necesita una mejor retroalimentación que a alta velocidad (1000 rpm y más).
La carga puede estar directamente acoplada al motor o puede haber un sistema mecánico de transformación, como un reductor, un tornillo sin fin u otros. Normalmente, los encoders se montan en el eje del motor, pero también pueden ir en la carga. Las propiedades mecánicas del mecanismo de transformación influyen en la selección del encoder: es necesario tener en cuenta la reducción y la holgura mecánica.
Las condiciones ambientales, como la temperatura, la vibración y las perturbaciones electromagnéticas, también pueden influir en la selección del encoder. Los encoder ópticos, por ejemplo, deben protegerse del polvo. Los encoders magnéticos pueden ser sensibles a los campos magnéticos externos, incluidos los del motor, y pueden requerir un blindaje.
¿Cuáles son las propiedades clave de los encoders incrementales?
El parámetro característico de un encoder incremental es el número de pulsos rectangulares por cada revolución del motor. De forma típica, hay dos canales que transmiten el mismo número de pulsos. Las dos señales tienen un desfase relativo de un cuarto de longitud de pulso. Esta disposición permite detectar el sentido de giro del motor y ofrece cuatro estados distintivos por pulso. A veces, estos estados se denominan quadcounts. Representan la resolución real, que es cuatro veces mayor que el número de pulsos en un canal. Un encoder con 1000 cpr (conteos o pulsos por revolución) ofrece 4000 estados por revolución o una resolución nominal de 360°/4000 = 0,09°.
Tenga en cuenta: cuando se habla de la resolución de un encoder, asegúrese de que todo el mundo se refiera a lo mismo: el número de pulsos por canal (cpr) o el número de estados (los quadcounts).
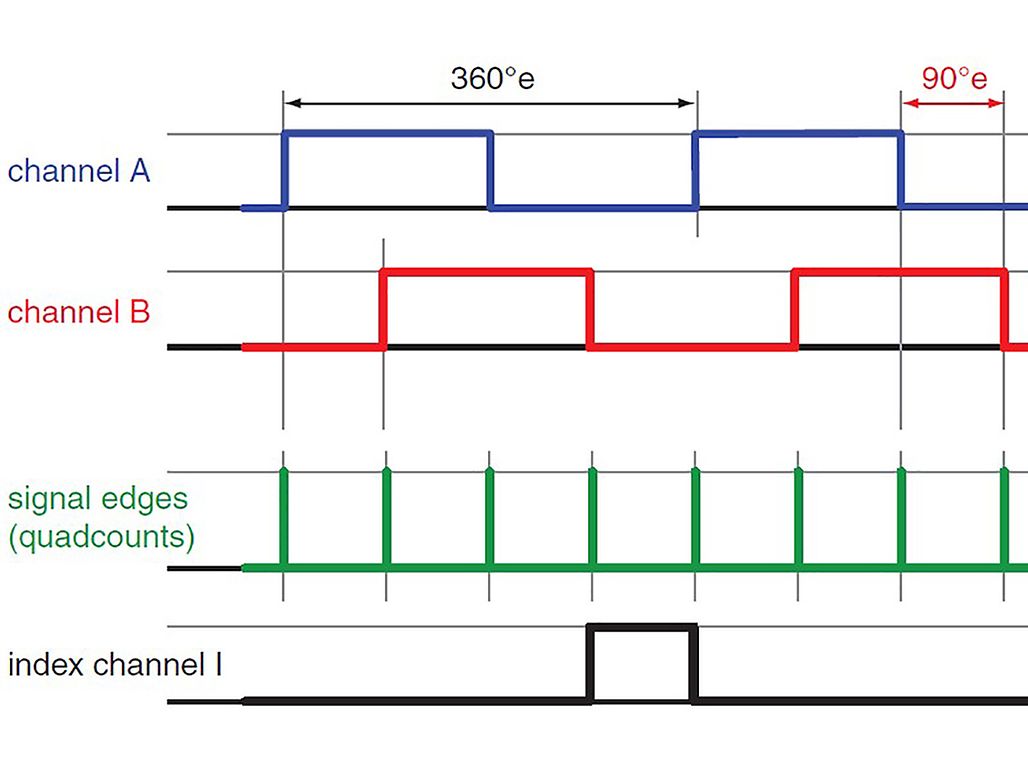
Las señales de un encoder incremental. El conteo de cambios de estado (los bordes de señal de los canales A y B) tiene como resultado una resolución cuatro veces mayor que el número de conteos por revolución en un canal del encoder.
La resolución del encoder puede variar en un amplio rango. Desde un simple encoder de 1 cpr (o 4 estados), que únicamente puede utilizarse para detectar movimiento, hasta varias decenas de miles de cpr para la retroalimentación de posición o velocidad con alta precisión. Hay muchos factores que influyen en la resolución que un encoder puede alcanzar: el principio físico subyacente (óptico, magnético, inductivo, …), el tipo de señal primaria (analógica o digital), el tratamiento de la señal (p. ej., interpolación) y el diseño mecánico, por nombrar algunos. Sin embargo, este blog no trata del diseño de encoders, sino de cómo los encoders adecuados pueden satisfacer los requisitos de control específicos de las aplicaciones.
¿Cuál es la precisión de los encoders?
La resolución (el número de estados) indica la precisión nominal. La posición se emite con un margen de error de 1 estado. Sin embargo, las longitudes de pulso de los encoders pueden variar debido a tolerancias mecánicas (p. ej., desviación del eje, longitud de los polos magnéticos y otras). Los pulsos en un rango de rotación del motor pueden ser más cortos que los pulsos de otros rangos. Como resultado, la posición medida se desvía de la posición real de manera periódica a lo largo de una revolución del motor.
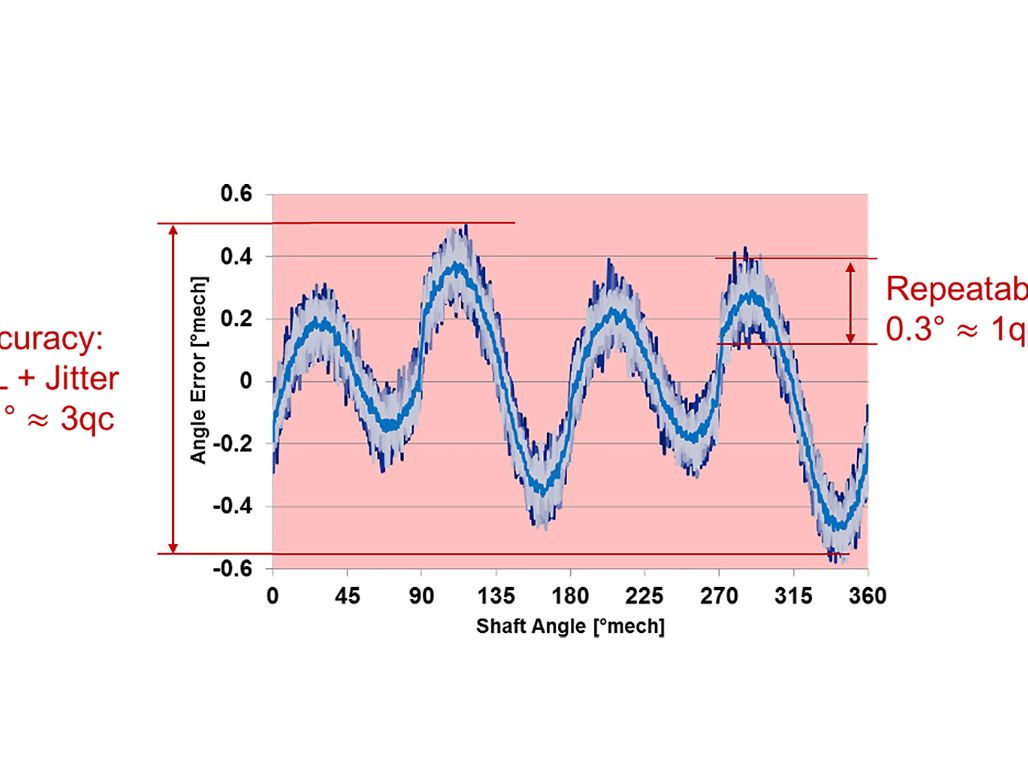
Ejemplo de no linealidad medida de un encoder interpolado magnético con 256 cpr. La desviación de la posición perfecta se muestra como una función de la señal del encoder (1024 quadcounts). El diagrama consiste en 25 mediciones de una revolución. Es posible ver claramente cómo la desviación se repite después de cada revolución. La desviación de la posición absoluta media es de aproximadamente +/-0,45° o, en términos de INL, de aproximadamente 0,9°. En una posición de encoder dada, el ruido de la señal (jitter) es de aproximadamente 0,3°, lo que equivale con bastante exactitud a una variación de 1 estado (360°/1024 = 0,35°).
La desviación máxima (de pico a pico) se denomina «Integrated Non-Linearity (INL)» o no linealidad integrada. La INL es importante en aplicaciones que requieren una precisión absoluta de la posición. La repetibilidad, es decir, la capacidad de alcanzar siempre la misma posición con un determinado valor ajustado, no se ve afectada por la INL. La repetibilidad es más bien una cuestión de jitter de señal, normalmente inferior a 1 estado.
¿Encoders incrementales y posiciones absolutas?
Los encoders incrementales solo indican cambios de posición. Para un posicionamiento absoluto, primero es necesario definir una referencia o posición inicial. Esto se realiza moviendo el mecanismo a una referencia externa, que podría ser un tope final mecánico o un sensor de final de carrera.
Algunos encoders disponen de un tercer canal con un pulso por revolución. Los bordes de este canal de índice señalan referencias de posición absolutas dentro de una revolución. La precisión limitada de las referencias externas puede mejorarse mediante un movimiento adicional de uno de los bordes del canal de índice. Sin embargo, tenga en cuenta que el canal de índice no es un requisito previo para el posicionamiento. De hecho, los ingenieros mecánicos intentan evitar usar el índice para referenciar, ya que este requiere una nueva calibración si es necesario sustituir una unidad de motor y encoder. Además, algunos controladores utilizan el canal de índice para realizar una comprobación cruzada de la señal del encoder y supervisar los conteos por revolución.
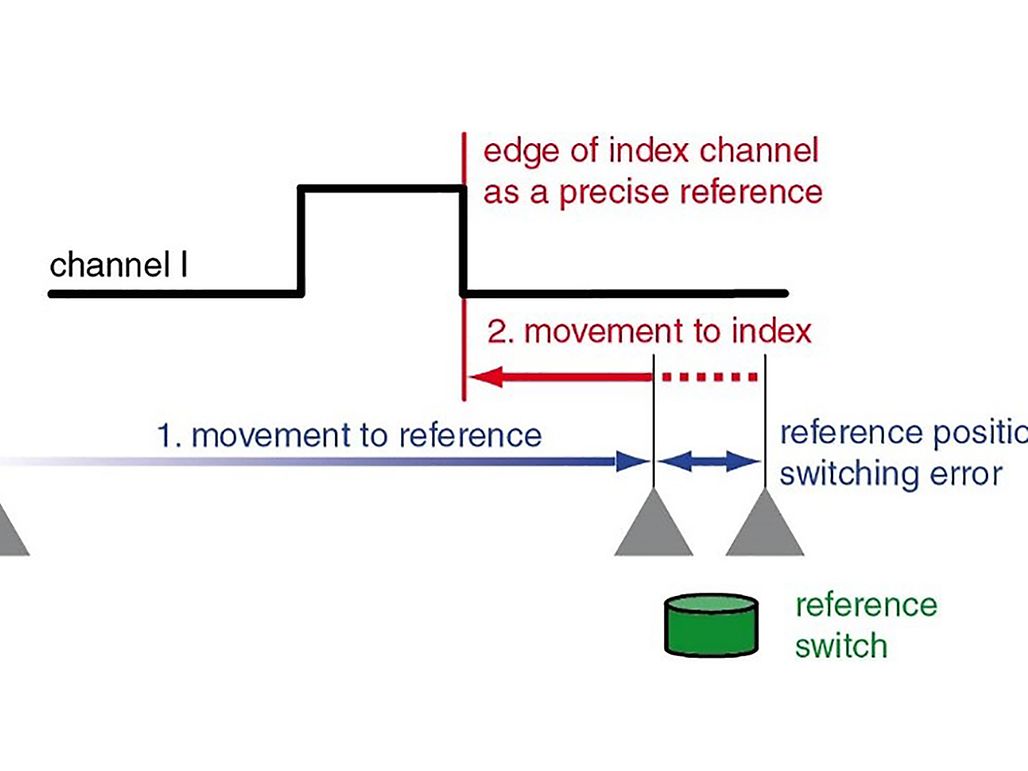
Mejora de la precisión de la posición de referencia mediante un movimiento adicional al borde de la señal del canal de índice.
¿Qué debe tenerse en cuenta cuando se transmite la señal?
Se recomienda utilizar amplificadores de línea para la transmisión a lo largo de líneas largas y para obtener una mejor calidad de señal. Para el posicionamiento, un amplificador de línea es casi obligatorio para evitar perder pulsos del encoder.
Los amplificadores de línea generan señales invertidas (Ā, B̄, Ī) para cada canal (A, B, I). Cada par de señales se transmite de forma conjunta y la diferencia se evalúa, lo que filtra cualquier interferencia electromagnética durante la transmisión de la señal. Como efecto secundario beneficioso, la calidad de la señal mejora, los bordes de la señal están definidos de forma más clara y la función de amplificador permite transmitir la señal a lo largo de distancias más largas (hasta 30 m).
El encoder requiere una mínima tensión de alimentación. En líneas de encoder largas, la resistencia de la línea y la respectiva caída de tensión pueden ser un problema. Es necesario comprobar la sección del cable y la tensión de alimentación.
Condiciones ambientales y resistencia
La temperatura de funcionamiento estándar de los encoders se encuentra en el rango entre -30 °C y +100 °C. Esto cubre la mayoría de las aplicaciones y el calor generado por el motor.
En aplicaciones en las que se producen grandes vibraciones y choques mecánicos, es importante contar con una carcasa mecánica resistente y una buena descarga de la tensión de los cables.
Mientras que los encoders ópticos son menos sensibles a las interferencias electromagnéticas, los encoders magnéticos necesitan un buen blindaje contra los campos de dispersión magnética. Si la carcasa no está bien cerrada de forma estanca, los encoders ópticos pueden verse afectados por el polvo.
En los siguientes blogs me gustaría profundizar en la selección de encoders para control de posicionamiento y velocidad.