Young Engineers Program
Robot colaborativo de gran agilidad

Los investigadores canadienses de la Universidad Laval están desarrollando un novedoso robot colaborativo que puede igualar la agilidad humana.
Los robots colaborativos (cobots) son brazos robóticos que los usuarios humanos puede manejar directamente para programar tareas sin necesidad de utilizar complejas interfaces de programación. Los cobots disponibles en el mercado están basados en arquitecturas en serie. Utilizan actuadores con relaciones de reducción muy altas, por lo que no es posible accionarlos mecánicamente en sentido inverso. Los sensores de fuerza/par reaccionan ante las fuerzas que los usuarios humanos aplican en el robot. Como consecuencia, tales robots no pueden igualar la agilidad humana, lo que hace que su uso sea poco natural en tareas guiadas por humanos.
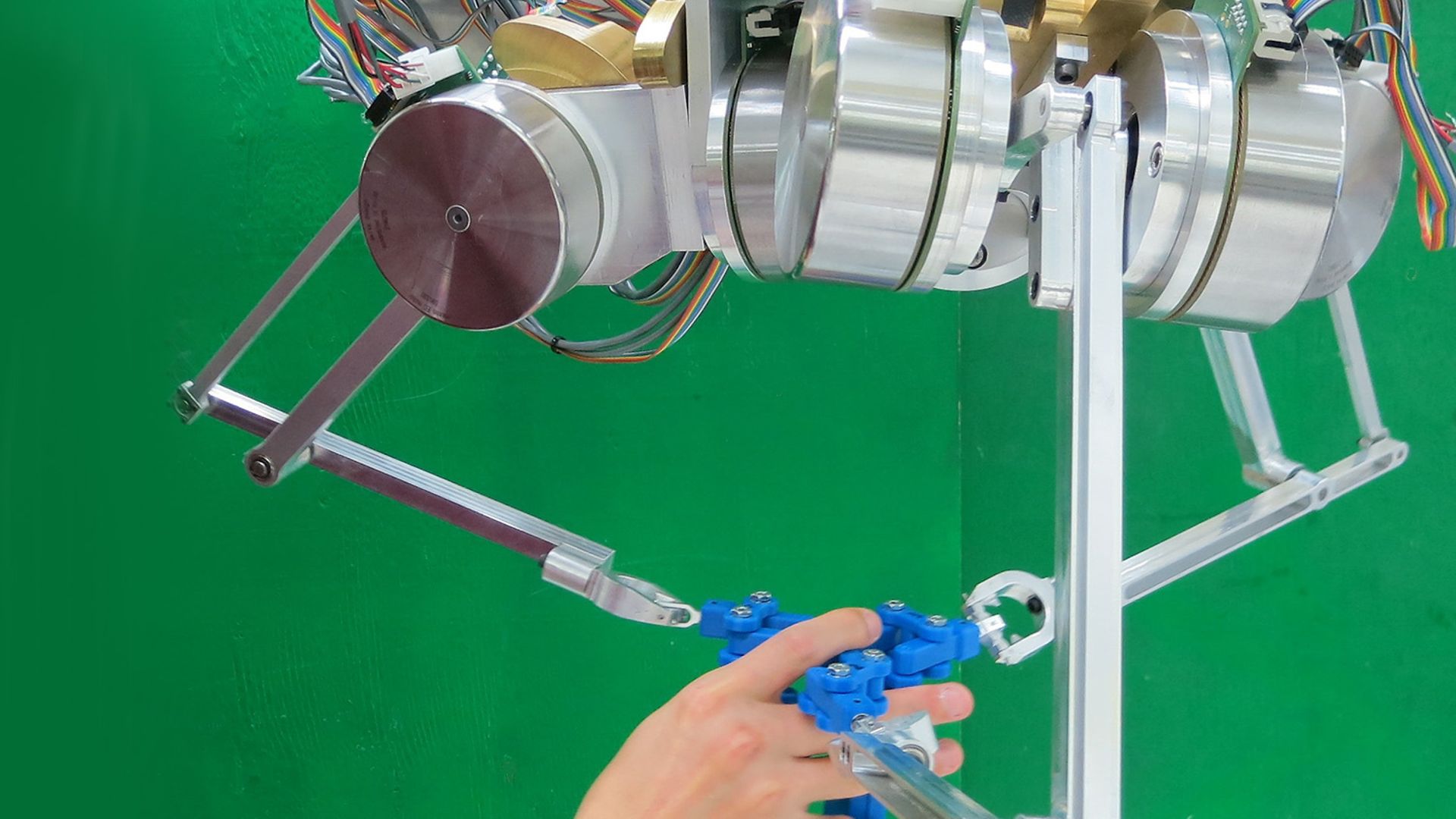
Los investigadores de la Universidad Laval han adoptado un planteamiento diferente. Proponen un robot colaborativo basado en una arquitectura paralela, lo que reduce considerablemente la inercia del movimiento y permite ubicar los actuadores en la base o cerca de ella. En este caso es posible utilizar actuadores de transmisión directa, lo que posibilita el accionamiento mecánico del robot en sentido inverso y elimina la necesidad de recurrir a sensores de fuerza/par. Para proporcionar un par suficiente en ausencia de reductores, se utilizan motores EC 90 flat. En las piernas del robot se incluyen contrapesos para reducir los pares estáticos en los actuadores. La posibilidad de accionar mecánicamente el robot en sentido inverso ofrece una interacción física intuitiva y sin esfuerzo entre los humanos y el robot. Además, permite usar un controlador muy sencillo y efectivo. La arquitectura del robot también hace posible que los actuadores en la base accionen una pinza, lo que es una ventaja adicional. Debido a su capacidad de accionamiento mecánico en sentido inverso, la baja inercia en los movimientos y la transmisión directa, el robot puede igualar la agilidad del brazo humano. Por ello, es especialmente adecuado para disfrutar de una interacción física intuitiva, ágil y sin esfuerzo entre los humanos y el robot en toda la gama de movimientos, como demuestran los vídeos adjuntos.