maxon Story
Industria aeroespacial: maxon en órbita a 400 km de la Tierra

La Estación Espacial Internacional (EEI) lleva en órbita alrededor de la Tierra desde hace más de 15 años. Esta estación internacional de investigación la utilizan de forma conjunta la agencia espacial estadounidense NASA, la agencia espacial rusa Roscosmos, la Agencia Espacial Europea (ESA) y las agencias espaciales de Canadá (CSA) y Japón (JAXA).
Desde que fue puesta en servicio en noviembre del 2000, un total de 295 astronautas han vivido a bordo de la estación espacial, ampliándola y trabajando en una serie de proyectos de investigación. Desde el año 2001 se han realizado más de 900 experimentos, iniciados por 63 países. Estos incluyen la investigación de cómo se orientan las plantas en gravedad cero, por qué los humanos pierden masa muscular y ósea en el espacio, y cómo reaccionan las células del sistema inmunológico humano en un ambiente ingrávido. Ya es sabido que el sistema inmunológico de los astronautas se debilita en el espacio. «De hecho, se puede comparar con el sistema inmunológico debilitado de las personas mayores», explica Alexandra Deschwanden, directora del equipo Biotesc de la Universidad de Ciencias Aplicadas y Artes de Lucerna. A principios del 2015, el equipo envió a la EEI dos proyectos de investigación a bordo de la cápsula SpaceX Dragon. El equipamiento técnico, como los diferentes dispositivos de laboratorio, es esencial para los experimentos a bordo de la EEI. También desempeñan un papel decisivo los robots que pueden realizar las tareas de los astronautas u ofrecerles asistencia.
Un robot experimental con un sistema de locomoción único
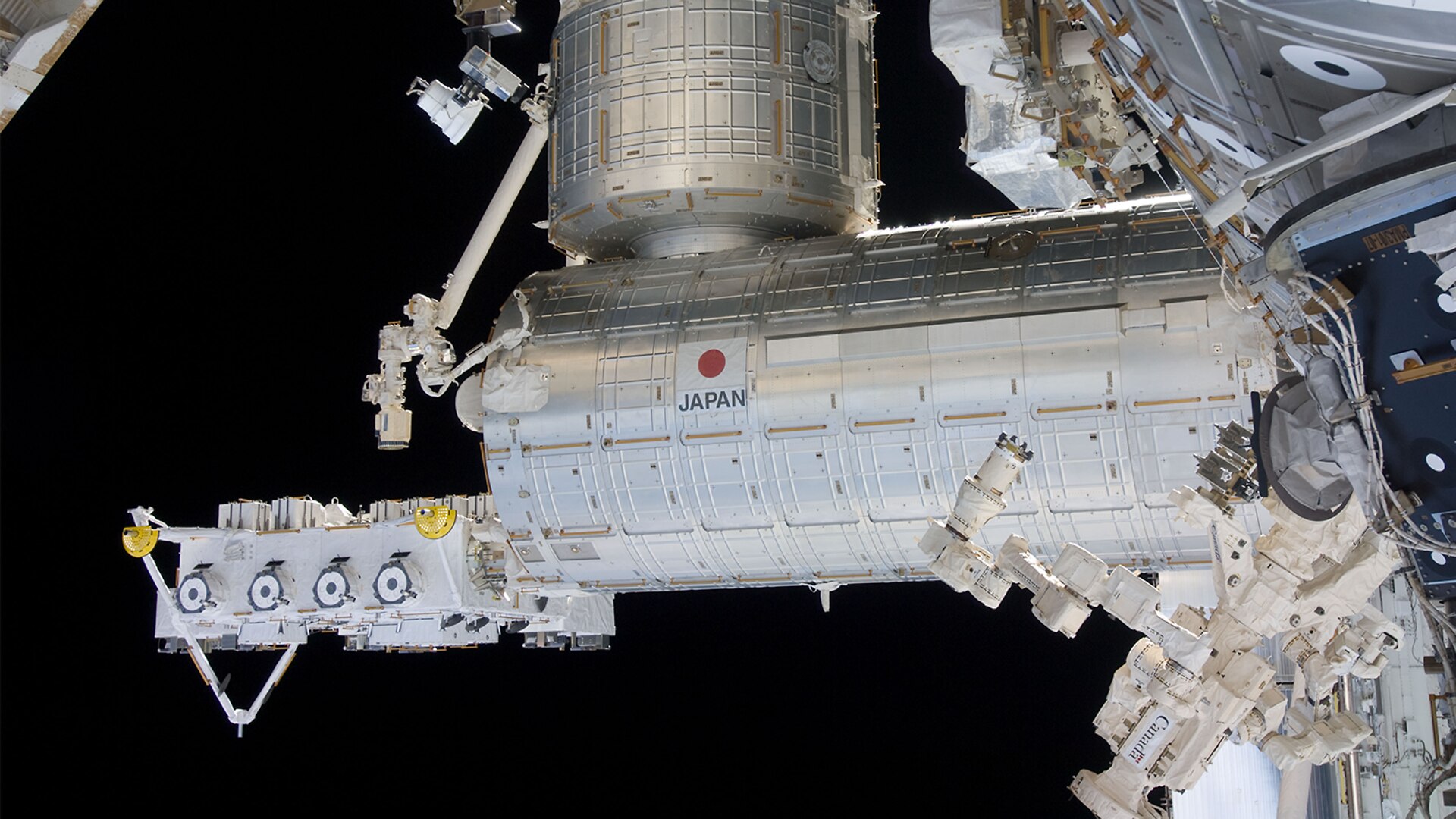
Uno de estos robots experimentales, llamado «REX-J» (Robot Experiment on JEM), se utilizó en el Kibo, el módulo japonés de la EEI, entre 2012 y 2013. Fue desarrollado por la Agencia Japonesa de Exploración Aeroespacial (JAXA). El objetivo de este experimento era desarrollar una nueva generación de robots (astrorrobots) capaces de moverse por la superficie de la estación espacial y en su interior para transportar cargas o realizar inspecciones.
Este robot es único debido a su sistema de locomoción, que utiliza un mecanismo de cables para su sujeción. Los cables se enganchan en las barandillas ya existentes en la EEI y que los astronautas utilizan para asegurarse durante los trabajos esenciales en el exterior de la estación. El robot móvil está equipado con un brazo extensible. En el extremo del brazo hay una mano robótica, capaz de enganchar los cables de sujeción en hasta tres puntos de anclaje diferentes. Esto permite al robot moverse en la superficie como una araña. El robot se maneja mediante control remoto desde la Tierra, por lo que no requiere intervención alguna por parte del personal de la EEI.
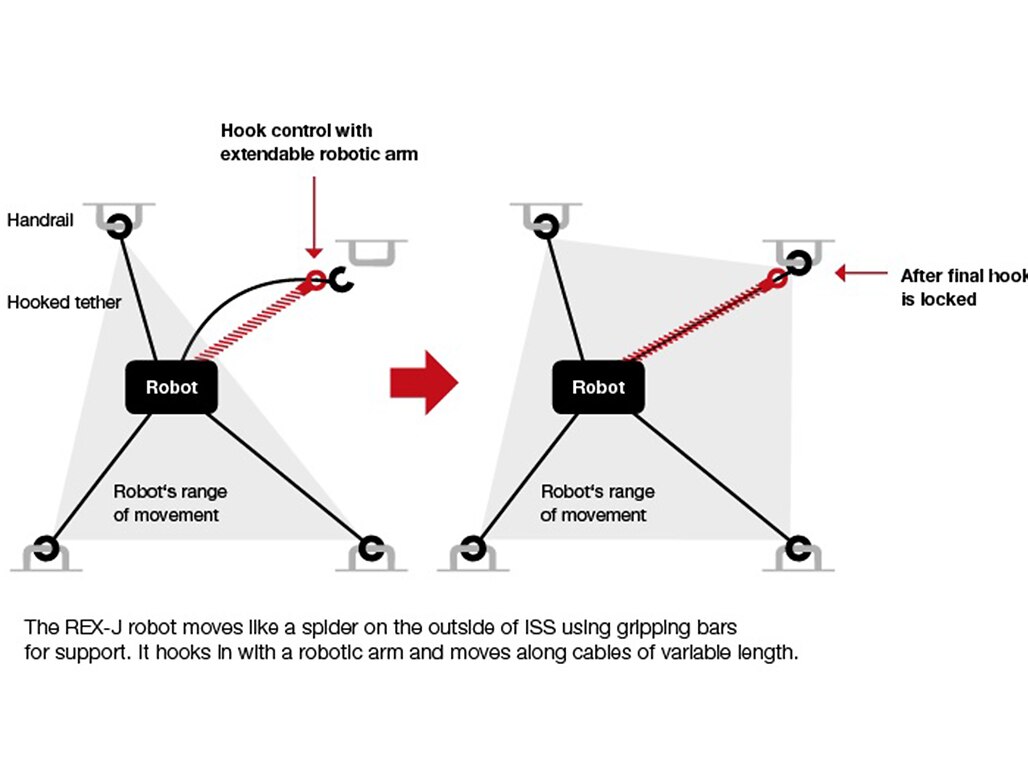
Asegurado por sus cables, el REX-J se mueve como una araña en el exterior de la EEI, utilizando las barandillas para sujetarse. Se engancha con su brazo y se mueve a lo largo de cables con longitud variable.
Potentes sistemas motores para movimientos de precisión
El REX-J está equipado con varios sistemas motores fabricados por maxon, al igual que su brazo robótico extensible. La articulación de la muñeca ofrece dos grados de libertad: vertical y horizontal. La articulación de la muñeca y el brazo contienen motores EC-max brushless, reductores planetarios y encoders.
La electrónica para el control de los motores está ubicada en el extremo del brazo robótico. También están instalados sistemas motores adicionales de maxon en el mecanismo giratorio del robot y en el cabrestante (mecanismo para enrollar los cables).
Todos los experimentos con el REX-J se han completado con éxito. JAXA continuará ahora desarrollando el sistema robótico con el objetivo de utilizar este tipo de robots en el futuro para una serie de tareas diferentes en la estación espacial. Estas incluyen la monitorización de los dispositivos de la EEI y la realización de inspecciones visuales de la estación espacial para detectar cualquier daño en el casco exterior. Otro objetivo a largo plazo es construir astrorrobots que puedan manipular estructuras de gran tamaño en el espacio.

EC-max brushless, reductores planetarios y encoders
La articulación de la muñeca del robot contiene motores EC-max brushless, reductores planetarios y encoders. Explore los productos EC-max en nuestra tienda online.