Expert Blog
Control de doble bucle: el fin de la holgura de los engranajes
¿Es posible posicionar cargas con dinamismo, gran precisión y sin oscilación a pesar de la holgura mecánica y la elasticidad de los componentes? Sí, utilizando un sistema inteligente.
El movimiento de cargas con un motor eléctrico se realiza normalmente con un sistema que usa un encoder en el eje del motor para proporcionar al control información de la posición y la velocidad. Una alta resolución del encoder y una detección precisa de la reacción del eje son esenciales para el control dinámico de la posición. Sin embargo, desde el punto de vista de la aplicación, el factor fundamental para la calidad y la precisión dimensional de los productos finales es, en última instancia, la precisión del movimiento de la carga en el lado de salida. Los reductores, los husillos y las correas de transmisión pueden tener un efecto negativo en ella. En función del sentido de movimiento, la holgura de los engranajes puede dar lugar a una posición de la carga diferente en el lado de salida. La elasticidad puede causar retardos y oscilaciones al iniciar o detener el movimiento. La primera solución que viene a la mente es montar el encoder en el eje de salida, en lugar de en el eje del motor. Sin embargo, esto no ofrece el éxito deseado, sino que el rendimiento del sistema es aún peor.
En el caso de un mecanismo con holgura o elasticidad, para un posicionamiento dinámico y preciso se requiere el uso de un sistema en el que el control se base en dos sistemas de encoder:
- Un encoder giratorio, el encoder auxiliar, se conecta de forma rígida al eje del motor. Ya debería formar parte de la combinación del motor.
- Otro encoder, el encoder principal, se conecta a la carga movida en el lado de salida.
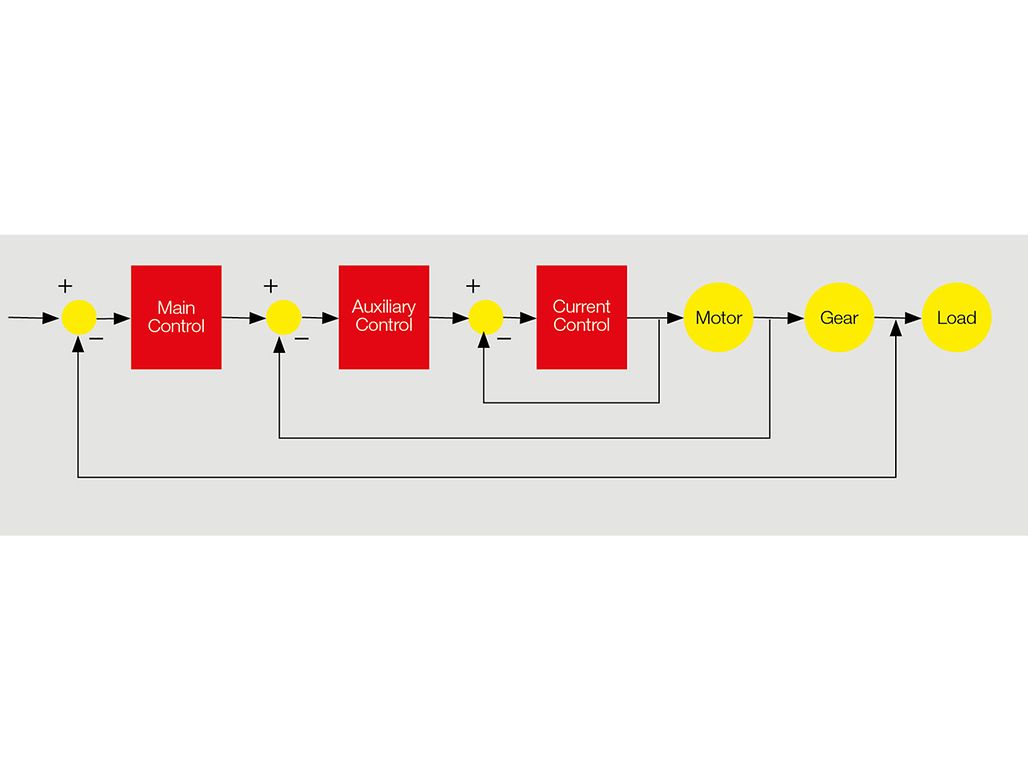
Figura 1: La arquitectura de doble bucle tiene integrados tres bucles de feedback.
Para procesar las señales de estos dos sistemas de encoder se requiere un control de doble bucle. Los controladores de posicionamiento EPOS4 de maxon mejoran este control de doble bucle con un filtro de segundo orden y un planificador de ganancia para contrarrestar la resonancia mecánica y la holgura de los engranajes. El software de puesta en servicio EPOS Studio proporciona la herramienta «Regulation Tuning», que determina automáticamente los parámetros para la compleja estructura de controlador. También diseña la función de transferencia del motor.
Arquitectura de control
EPOS4 usa una estructura de control en cascada para el control de doble bucle (véase la figura 1):
- El bucle de control más interno proporciona un control orientado en campo (FOC, por sus siglas en inglés) de la corriente del motor basándose en la medición de la corriente del motor como señal de feedback.
- El bucle de control central (control auxiliar) controla la velocidad del motor basándose en el encoder en el eje motor.
- El bucle de control exterior (control principal) controla la posición de la carga basándose en el sistema de encoders en la carga.
En la figura 2 se muestra una vista detallada de la estructura del control de doble bucle EPOS4.
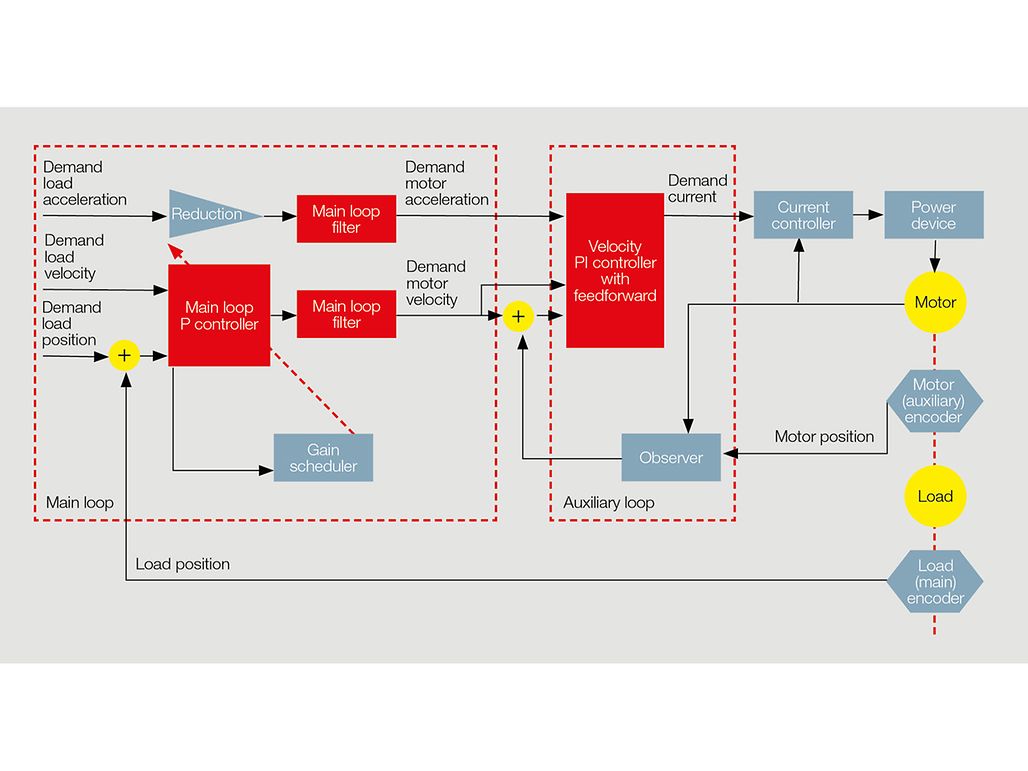
Figura 2: Vista detallada de todos los componentes del sistema de control de doble bucle.
Bucle de control principal
El bucle de control consiste en un controlador proporcional (P), un planificador de ganancia y un filtro de segundo orden (el filtro del bucle principal). Un planificador de trayectos proporciona como variables de entrada para el bucle de control principal la posición deseada de la carga, así como su velocidad y aceleración previstas. Otra variable de entrada es la posición actual de la carga, medida por el encoder instalado en ella.
- Planificador de ganancia
El control de doble bucle EPOS4 utiliza un planificador de ganancia para eliminar efectos negativos debidos a la holgura de los engranajes. El planificador de ganancia lleva esto a cabo de forma automática ajustado la ganancia P del bucle de control principal. Si el error de seguimiento —la desviación de la posición real de carga en relación con la posición deseada— es excesivo, se aplica una alta ganancia P, lo que tiene como resultado una rápida reducción del error. A medida que el error de seguimiento disminuye, la ganancia P también se reduce, de manera que no se produce una oscilación en el motor, a pesar de la holgura de los engranajes.
- Filtro de bucle principal
Si hay una cierta cantidad de elasticidad entre el motor y la carga debido a acoplamientos, correas o husillos largos, las frecuencias de resonancia podrían amplificar las oscilaciones. Esas últimas podrían aumentar hasta un punto en el que el control se vuelve inestable. Para prevenir esto, el controlador de doble bucle EPOS4 utiliza un filtro de segundo orden del tipo notch. Este filtro suprime el rango de frecuencia de resonancia en la señal de salida del bucle de control principal, lo que previene oscilaciones armónicas en el tren de transmisión.
Bucle de control auxiliar
El bucle de control auxiliar consiste en un controlador proporcional-integral (PI) con control anticipativo, o feed forward (FF), que calcula la velocidad del motor a partir de los datos de posición del encoder del motor y las mediciones de corriente del motor.
Procedimiento de autoajuste
Para simplificar la puesta en servicio, el software EPOS Studio de maxon ofrece un asistente integrado de autoajuste para determinar y validar los parámetros del controlador de doble bucle. El procedimiento de autoajuste consiste en dos experimentos que se ejecutan automáticamente.
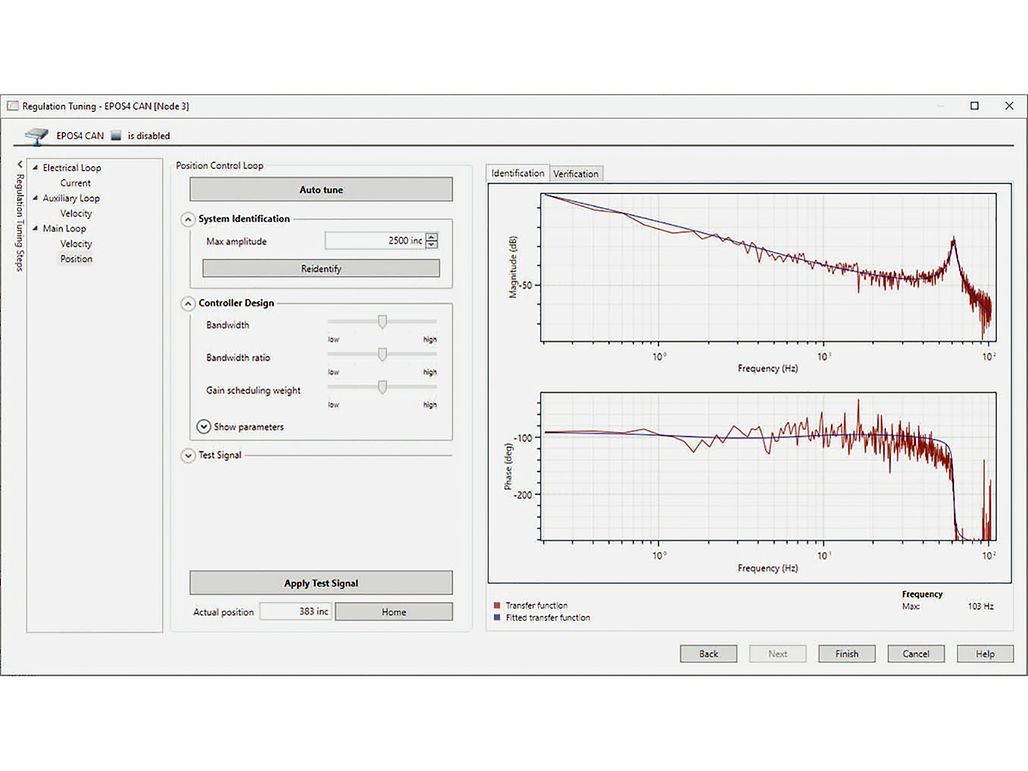
Figura 3: Ejemplo de una función de transferencia identificada utilizando el EPOS4, con resonancia.
- El experimento 1 produce oscilaciones en el eje del motor. Estas oscilaciones se utilizan para determinar la inercia de la masa, la constante de par y la fricción en el motor. Los parámetros para el controlador de bucle auxiliar y el observador se calculan entonces sobre la base de los datos identificados.
- El experimento 2 se usa para calcular los parámetros para el bucle de control principal y el filtro notch. Una señal PRBS (siglas en inglés de secuencia binaria pseudoaleatoria) se usa para excitar la instalación. Sobre la base de los datos de entrada-salida resultante, la función de transferencia se identifica y presenta como un diagrama de Bode (véase la figura 3).
El diagrama de Bode puede exportarse. Sirve de ayuda a los técnicos de control para el análisis del sistema al optimizar el diseño mecánico y para la adaptación manual del control para aplicaciones específicas.
Comparación de control de bucle único y de bucle doble
Los siguientes gráficos muestran las diferencias en la respuesta de referencia y el error de seguimiento para un sistema con holgura de los engranajes (figura 4) y un sistema con acoplamiento elástico (figura 5). Los gráficos comparan un control de bucle único, con un encoder en la carga, y un control de doble bucle con ajuste automático, con un encoder en el eje del motor y en la carga.
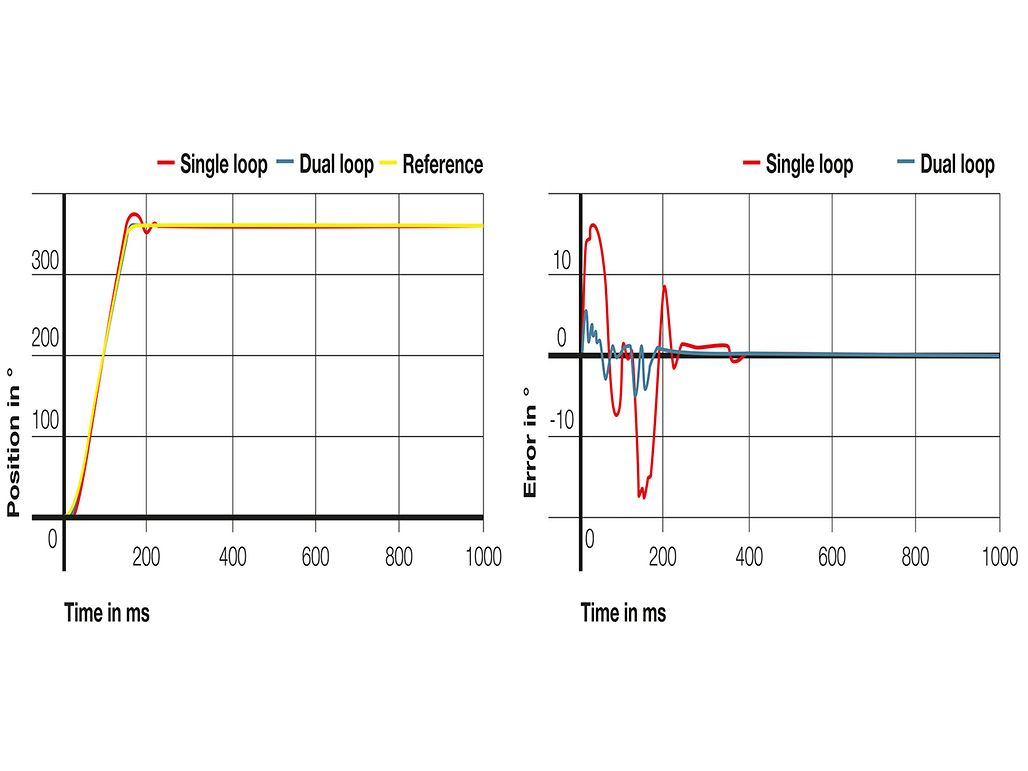
Figura 4: Perfil de posición de la carga de un sistema con holgura de los engranajes: respuesta de referencia (arriba) y error de seguimiento (abajo).
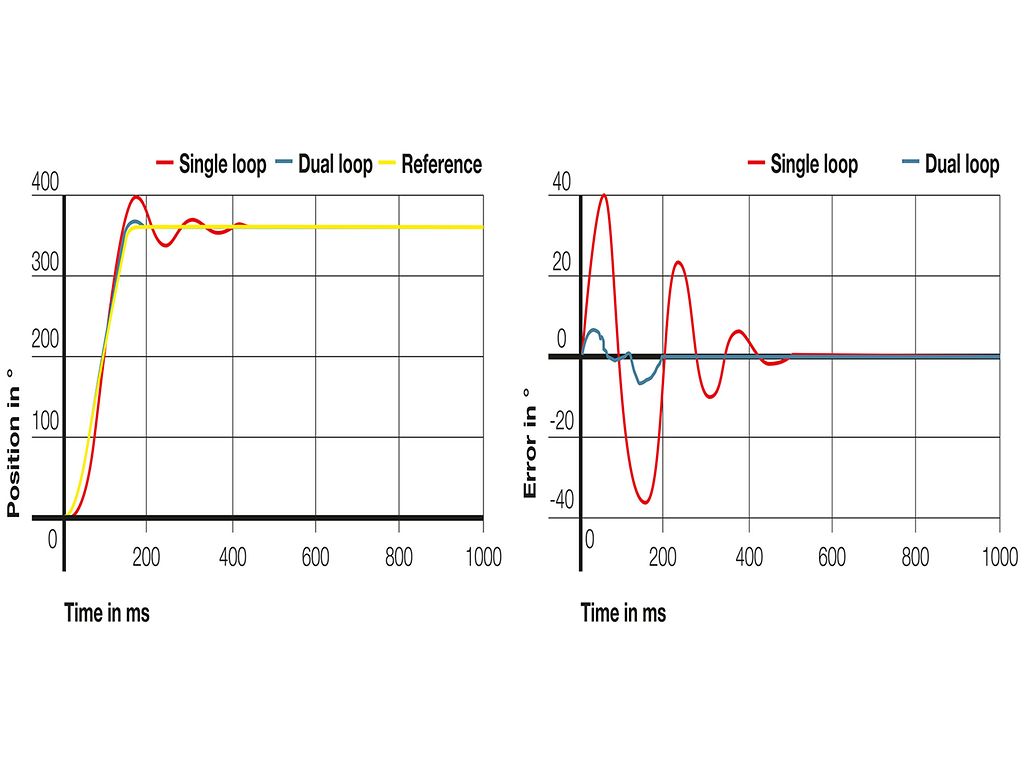
Figura 5: Perfil de posición de la carga de un sistema con elasticidad: respuesta de referencia (arriba) y error de seguimiento (abajo).
El control de doble bucle es un método para incrementar la precisión y la eficiencia de sistemas motores. maxon no solo ofrece todos los componentes necesarios, sino también una buena experiencia en asesoría, desde la idea inicial y el diseño del sistema hasta la producción comercial a gran escala.