maxon Story
Densidad de potencia en la robótica

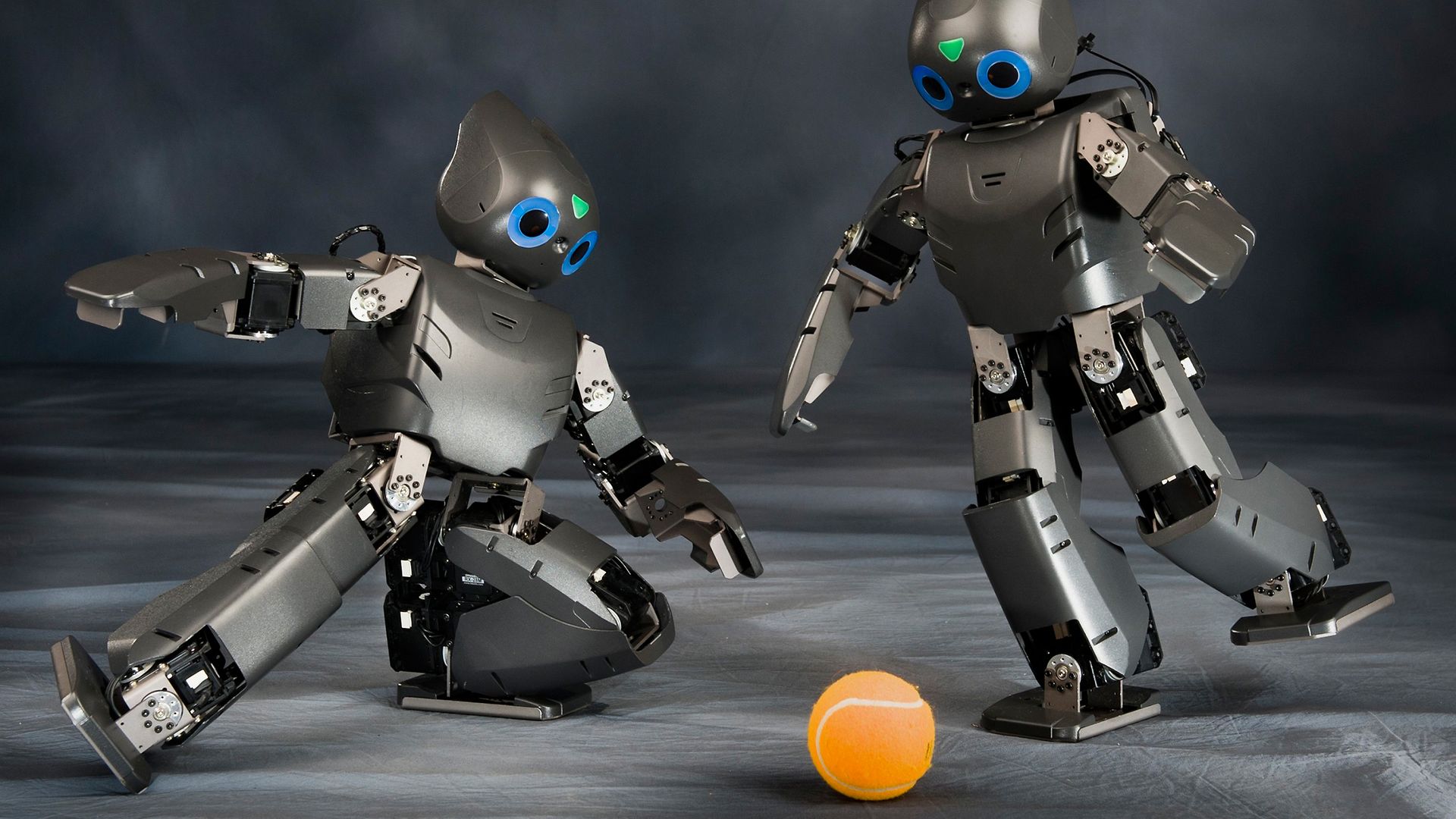
Es una cuestión de par. Los robots de inspección de tuberías y conductos, los robots de rescate y los robots humanoides, todos tiene una cosa en común: son robots móviles que ayudan a los humanos. Aquí explicaremos en detalle algunos de sus requisitos de tecnología motriz.
Uno de los requisitos de los sistemas motores de robots móviles es una alta densidad de potencia. Esto generalmente significa que deben ofrecer un par elevado al mismo tiempo que ocupan el espacio más reducido posible. En lo que respecta a la velocidad, las velocidades inferiores a 1000 rpm suelen ser suficientes en la robótica, incluso para movimiento rápidos.
Motores DC: alta densidad de potencia
Por regla general, los motores DC son la mejor opción cuando se requiere una alta densidad de potencia. Su par inicial elevado hace que sean perfectos para aplicaciones de aceleración. Los motores maxon «sin hierro», con y sin escobillas, son ejemplos típicos de estos motores DC. Son altamente eficientes. Generalmente, estos motores de alta velocidad son largos y estrechos, y ofrecen un par relativamente bajo. Para alcanzar los pares elevados que se requieren en la robótica, los motores se combinan con reductores.
Si se requiere un movimiento lineal con fuerza elevada, esto puede obtenerse mediante un diseño mecánico adecuado con una alta relación de reducción sin sacrificar los beneficios de los motores de alta velocidad. Algunos ejemplos de esto son los husillos con paso de rosca bajo y transmisiones por cable con una polea pequeña.
Motores multipolos: par superior
Es posible obtener pares elevados incrementado el número de polos magnéticos. Los motores EC-4pole de maxon son un primer paso hacia los motores multipolos. En este caso, los polos magnéticos adicionales también implican un diseño y un montaje más complejos. Los motores DC sin escobillas convencionales con un núcleo de hierro con ranuras están a menudo diseñados con múltiples polos y, como resultado, tienden a proporcionar velocidades más bajas y pares más altos.

Sistemas motores para robots: se requieren pequeñas centrales de energía - Tres aspectos son fundamentales en los motores que se utilizan en aplicaciones robóticas: alta eficiencia, alto dinamismo y alta densidad de potencia.
Motores EC planos: potentes y con precio interesante
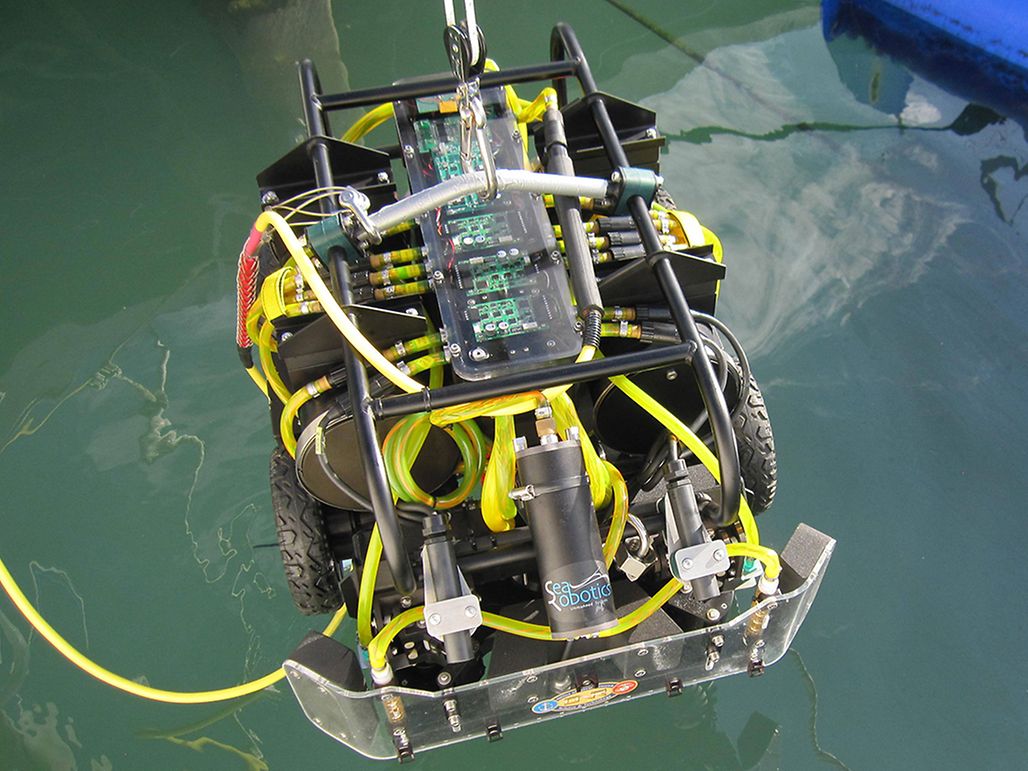
Los motores planos multiaxiales de maxon son lo que más se acerca al motor ideal para la robótica. Estos motores con rotor externo generan fuerza a la máxima distancia posible del eje de rotación, lo que ofrece una densidad de potencia relativamente alta a velocidades moderadas. Sin embargo, la inercia del motor también es alta, lo que limita el dinamismo. El robot de limpieza subacuática Hullbug es un ejemplo de aplicación de motores planos. Debido a su bobinado multidientes convencional con un núcleo de hierro y el uso de un imán anular permanente e isotrópico, magnetizado en un solo paso, los motores EC planos se fabrican de forma económica. Se suprime el complejo montaje del imán anular de las piezas individuales.
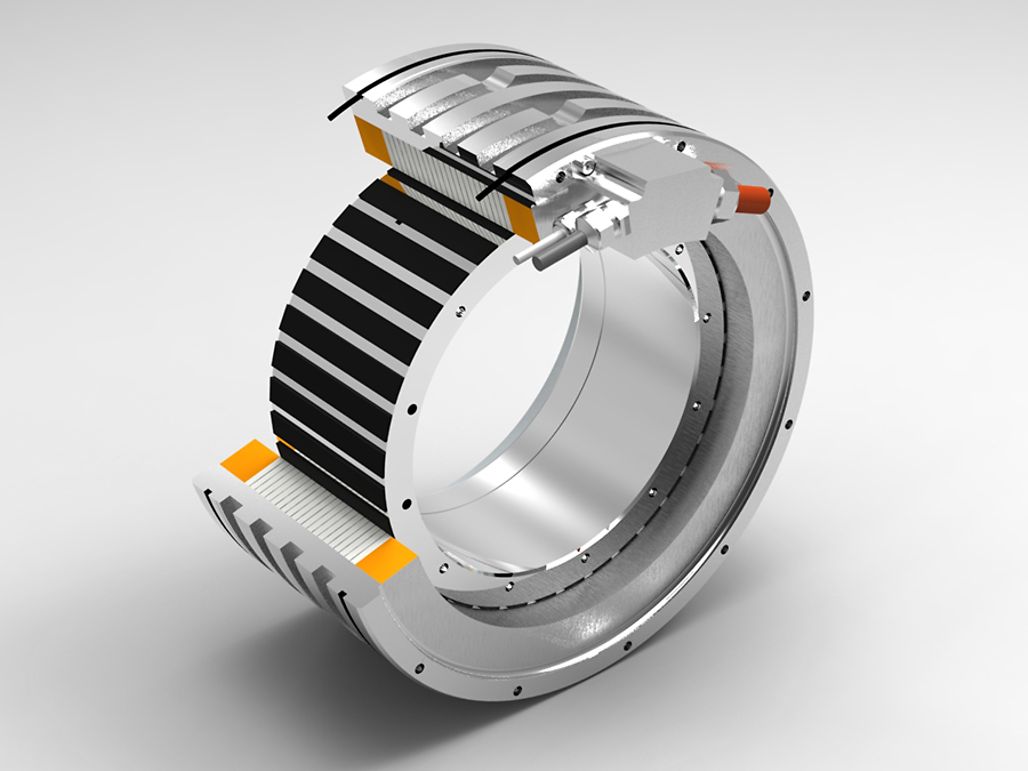
Vista delantera y trasera del EC90 plano. El robot de limpieza subacuática Hullbug es un ejemplo de aplicación de motores planos.


Motores de par: gran cantidad de polos, pero a un precio demasiado alto
Los motores de par son un ejemplo de motores con una gran cantidad de polos: motores eléctricos de baja velocidad y par elevado, con un eje hueco. A menudo solo constan de un rotor y un estátor, y están diseñados directamente para la aplicación. Esto elimina la necesidad de reductores, correas, acoplamientos o rodamientos. Estos motores directos no tienen holgura y se utilizan normalmente en aplicaciones dinámicas con control preciso. Los motores lineales son un caso especial. Debido a que tiene muchos polos, los motores de par requieren altas frecuencias de conmutación. Además, el calor generado debe disiparse mediante refrigeración por agua.
Aunque los motores de par cumplen perfectamente los requisitos de par y dinamismo de las aplicaciones robóticas, la falta de estandarización y las consecuencias de gran alcance para el diseño hacen que su uso sea costoso. Como resultado, las combinaciones modulares y flexibles de motor y reductor son la solución preferida para los robots. El tipo y el diseño del motor se seleccionan de acuerdo con los requisitos específicos de potencia, espacio y, por último, pero no por ello menos importante, el coste.
¿Alguna pregunta? Póngase en contacto con nuestros especialistas.