Expert Blog
Control sin sensores de motores sin escobillas


Muchas aplicaciones se beneficiarían de un motor sin escobillas y sin sensor. Hay varias opciones para conseguir esto. Un método desarrollado por maxon está estableciendo ahora nuevos estándares de precisión y fiabilidad.
Para que un motor sin escobillas funcione se requiere una electrónica de control con conmutación de precisión. Sin embargo, esto solo es posible si la electrónica de control «conoce» la posición exacta del rotor en todo momento. Tradicionalmente, esta información era proporcionada por sensores, como sensores Hall, instalados dentro del motor. Pero se puede hacer de otra manera. Los métodos de control sin sensores utilizan la información de corriente y tensión del motor para determinar la posición del rotor. La velocidad del motor puede deducirse entonces a partir de los cambios en la posición del rotor y esta información puede usarse para el control de la velocidad. Los métodos más avanzados de control sin sensores pueden incluso controlar la corriente (par) y la posición. La eliminación de los sensores ofrece una serie de ventajas, como costes reducidos y ahorro de espacio, ya que se hace innecesario el uso de cables, conectores y circuitos electrónicos sensibles.
Los controladores sin sensores de maxon utilizan tres principios básicos que se han adaptado específicamente para los motores BLDC de maxon.
Principio 1: método FEM con cruce cero
El método FEM con determinación del cruce cero utiliza tensión inducida (o fuerza electromotriz, FEM) en la fase desenergizada durante la conmutación de bloques. El cruce cero tiene lugar en mitad del intervalo de conmutación (figura 1). El retardo al siguiente punto de conmutación puede calcularse a partir de los pasos de conmutación precedentes.
El método FEM con cruce cero solo funciona si la velocidad es lo suficientemente alta, ya que la FEM se convierte en cero en estado de parada. El arranque del motor requiere un proceso especial, similar al control de un motor de pasos, y debe configurarse por separado. Una verdadera conmutación sin sensores solo es posible con velocidades del motor de 500-1000 rpm y superiores. La frecuencia del paso de conmutación se utiliza para el control de velocidad. La información limitada de retroalimentación impone algunas restricciones al dinamismo del motor, aunque esto puede mejorarse integrando métodos de estimación en el algoritmo de control (observador, filtro Kalman, etc.). El método FEM con cruce cero ofrece una serie de ventajas: funciona en todos los modelos de motores sin escobillas y es estable y económico. Este método se utiliza en muchos productos estándar, como el ESCON Module 50/4 EC-S de maxon.
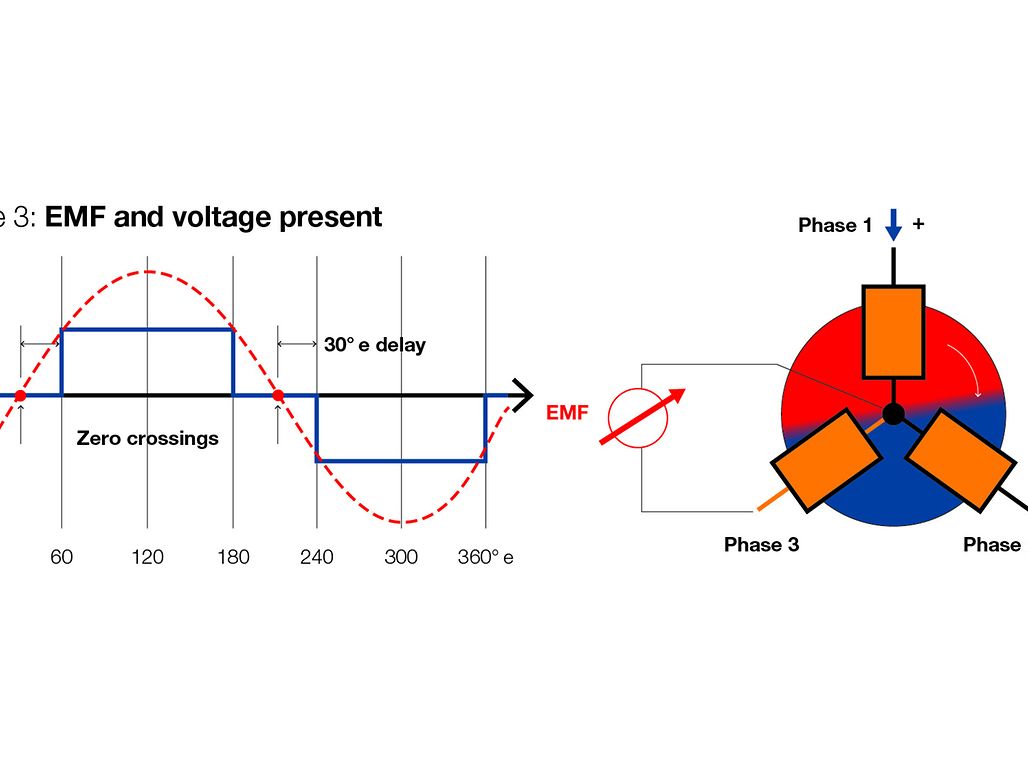
Figura 1: Ilustración esquemática de la conmutación sin sensores del método FEM con cruce cero. Aquí se muestra utilizando la fase 3 como ejemplo.
Principio 2: método FEM basado en observador
Los métodos de observador o FEM basados en modelo usan la información sobre la corriente del motor para determinar la posición y la velocidad del rotor. El método basado en modelo obtiene una resolución mucho más alta de la posición del rotor. Esto permite realizar una conmutación sinusoidal (control de campo orientado o FOC, por sus siglas en inglés), con todas sus ventajas: mayor eficiencia, menor generación de calor, menos vibraciones y ruido. Sin embargo, el método FEM basado en observador también requiere una velocidad mínima de varios cientos de rpm para funcionar correctamente.
Principio 3: métodos de anisotropía magnética
Los métodos basados en anisotropía magnética deducen la posición del motor a partir de su inductancia, la cual es mínima cuando los flujos magnéticos del rotor y el estátor son paralelos en el retorno magnético (figura 2). La medición se realiza mediante pulsos de corriente breves que no hacen que el motor se mueva. A diferencia de los métodos basados en FEM, este método también funciona en parada y a velocidades muy bajas, y permite utilizar una conmutación sinusoidal. Las señales medidas dependen mucho del tipo de motor. La posición del rotor se determina en un modelo del motor, el cual debe parametrizarse y adaptarse a cada motor. Por ello, los controladores basados en anisotropía magnética son productos altamente específicos, donde «plug and play» no es una opción. El esfuerzo de cálculo requerido para evaluar la posición del rotor también limita la velocidad máxima.
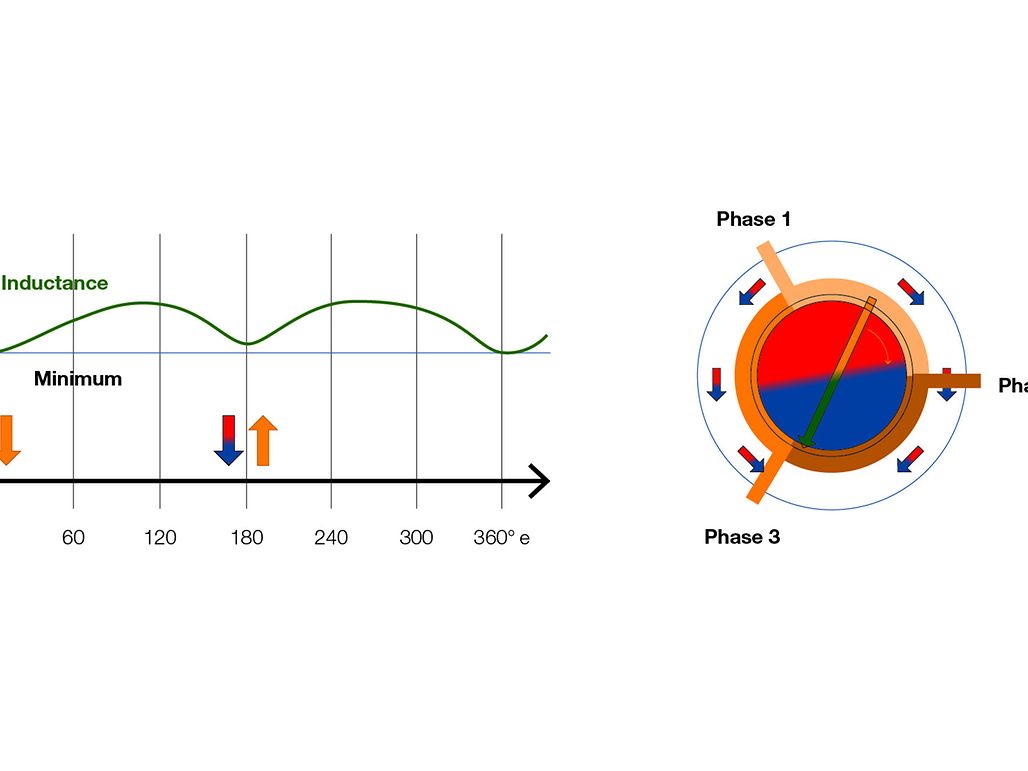
Figura 2: diagrama esquemático de la anisotropía de la inductancia. Muestra dos mínimos casi idénticos a una distancia de 180 grados eléctricos.
¿Por qué control sin sensores?
En aplicaciones en las que el precio es importante, el uso de motores sin sensores puede reducir los costes. Se hace innecesario el uso de sensores Hall, encoders, cables y conectores. Las aplicaciones típicas en este campo son ventiladores, bombas, escáneres, muelas, taladros y otras aplicaciones de alta velocidad de giro con un rendimiento de control relativamente modesto que no requiere un arranque controlado con gran precisión. En el caso de pedidos grandes, tiene sentido usar una versión personalizada del controlador basado en FEM.
Optimización de costes para un alto rendimiento del controlador
El ahorro de costes no es el único motivo para decidirse por el control sin sensores. Algunas aplicaciones, como motores para puertas o bicicletas, requieren un alto rendimiento del controlador. Es importante obtener un control del motor sin sacudidas desde cero rpm, así como también un alto dinamismo y una conmutación sinusoidal para evitar el ruido. Todo esto debe lograrse sin necesidad de invertir en un encoder caro. En los últimos años se ha consolidado el uso de controladores de alta calidad sin sensores y basados en el método de anisotropía, lo que incluye el High Performance Sensorless Control (HPSC, véase más abajo). Sin embargo, el esfuerzo de ingeniería requerido para adaptar los parámetros del modelo solo puede justificarse en pedidos de varios cientos de unidades.
Condiciones ambientales difíciles
El control sin sensores también puede requerirse en situaciones en las que es preferible evitar la electrónica sensible de los sensores. Ejemplos de ello son aplicaciones a temperaturas ambiente muy altas o bajas, la limpieza y la esterilización en la tecnología médica o la radiación ionizante en el espacio, instalaciones nucleares o entornos médicos. El bajo número de conectores del motor también simplifica la integración si el espacio es reducido.
La calidad de control requerida depende de la aplicación. Cuál es el método sin sensores más adecuado es algo que debe decidirse en cada caso. Un ejemplo son los instrumentos dentales manuales, los cuales requieren altas velocidades para taladrar o pulir, mientras que para colocar tornillos en cirugía se requieren velocidades más bajas y par controlado.
Conclusión
Hay tres motivos principales para decidirse por el control sin sensores: ahorro de costes, ahorro de espacio y funcionamiento en entornos no aptos para sensores. El método FEM con determinación de cruce cero está muy extendido en aplicaciones donde el precio es importante y que requieren velocidades altas. El control sin sensores en estado de parada y a bajas velocidades exige métodos más avanzados. El esfuerzo de implementación es mayor e incluye la modelización y la parametrización. El ahorro de costes es secundario. El control de campo orientado ofrece una alta eficiencia, menos generación de calor y un nivel más bajo de vibraciones y ruido. Todas estas son ventajas que se despliegan de forma especial en los instrumentos médicos manuales.

Controladores sin sensores de maxon
__El HPSC Module 24/5 (High Performance Sensorless Control o control sin sensores de alto rendimiento) es un nuevo desarrollo de maxon. Se trata de una plataforma de hardware y software específica para el cliente. HPSC es siempre una solución personalizada y, por ello, no es un producto del catálogo. ¿Qué tiene de especial este desarrollo?: en estado de parada y a bajas velocidades se utiliza primero la tecnología de control basada en anisotropía magnética (principio 3). Cuando la velocidad aumenta, le sigue una suave transición a un método FEM basado en observador (principio 2). El firmware del módulo está personalizado para cada sistema motor. En un proceso especial de puesta a punto se ajustan automáticamente más de 120 parámetros para crear la «huella digital» de cada motor. Un ejemplo del uso de HPSC es el instrumento médico manual recientemente desarrollado por maxon.
__El ESCON Module 50/4 EC-S es el único controlador sin sensores de maxon que se encuentra en el catálogo (conmutación de bloques con método FEM y determinación de cruce cero). El Sensorless Controller 24/1 es una alternativa para los motores EC más pequeños (hasta un diámetro de unos 10 mm). Sin embargo, no se encuentra en el catálogo ni en la tienda online.