Young Engineers Program
Abriendo camino a los robots voladores

Como parte de un proyecto prioritario de la ETH de Zúrich, ocho estudiantes de grado construyeron un manipulador volador que puede desplazarse en cualquier dirección y agarrar objetos. Este dron es incluso más maniobrable que un cuadricóptero y ha sido diseñado con el objetivo de llevar a los robots aéreos hasta nuevas alturas.
Pensemos en un almacén con robots voladores que transportan paquetes. Muchos inventores han intentado hacer realidad esta visión del futuro de la intralogística equipando cuadricópteros con brazos con pinzas de serie. Pero tales combinaciones de dron y brazo son lentas, y el brazo extendido provoca una distribución desfavorable del peso, lo que afecta tanto a la precisión como a la capacidad de carga. Además, los cuadricópteros solo pueden rotar en el plano horizontal, lo que significa que el denominado efector final —en este caso, la pinza— no puede moverse en todas las direcciones. Por el momento, la mayoría de los drones aún se limitan a realizar tareas de inspección.
El pasado otoño, un equipo de estudiantes de ingeniería mecánica y de procesos de la ETH de Zúrich tuvieron la idea de desarrollar un robot volador integrado que no ofreciera estas desventajas. Los futuros jóvenes abordaron el proyecto prioritario, convocado por el Autonomous Systems Lab (ASL), y construyeron un manipulador volador omnidireccional. Se trata, en otras palabras, de un dispositivo capaz de interactuar físicamente con su entorno.

Inspirado por una impresora 3D
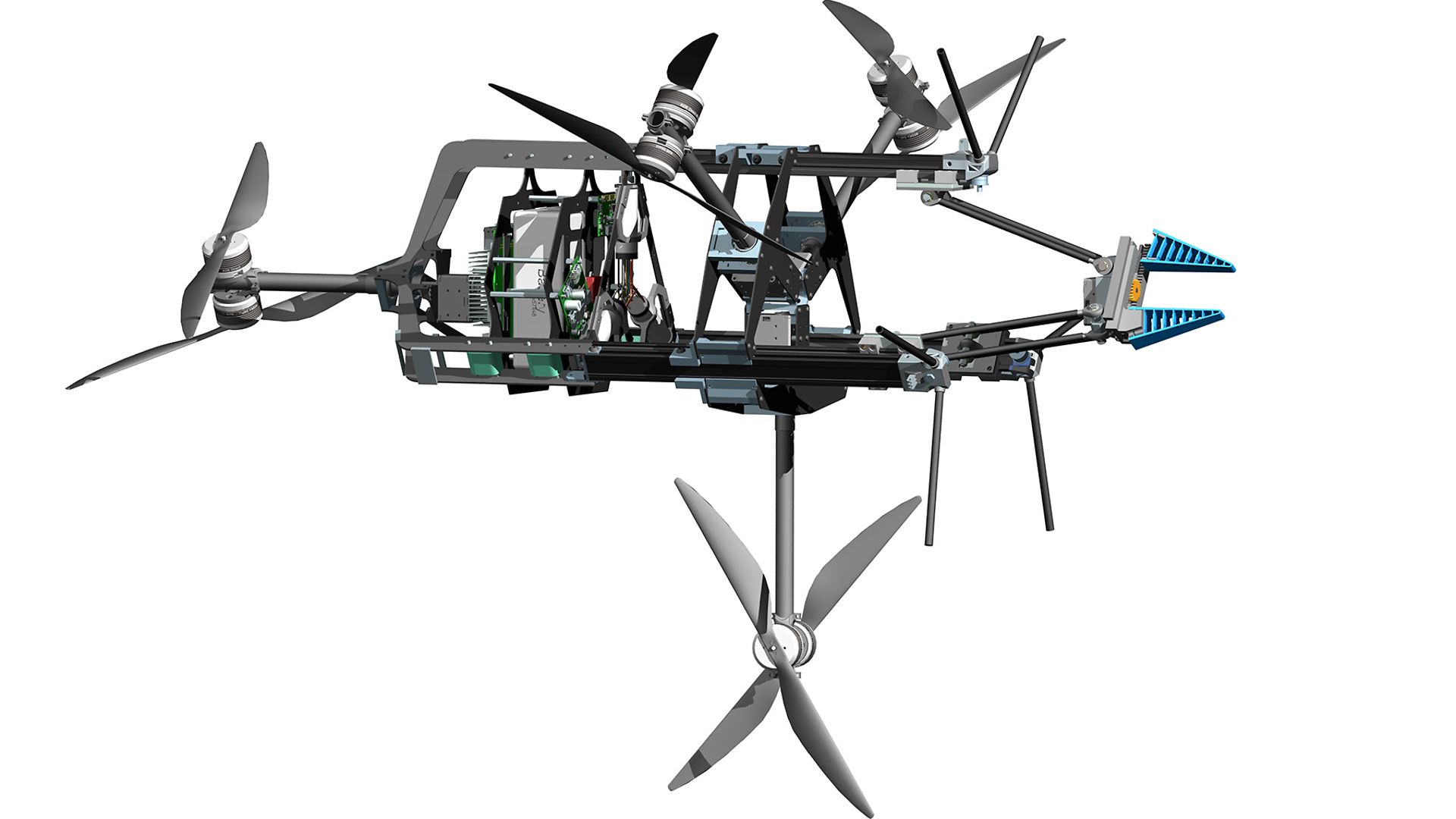
Para crear un efector final de alta precisión, los estudiantes instalaron un brazo paralelo lineal que se posiciona mediante tres correderas que se mueven dentro de una estructura prismática. Los jóvenes innovadores equiparon el Prismav —Prism Micro Aerial Vehicle— con cuatro motores alineados de diferente manera, cada uno de ellos compuesto por dos hélices que giran en sentidos opuestos. Esto equilibra el movimiento de las hélices individuales y permite obtener un comportamiento estable de vuelo.
La inspiración para el brazo delta vino del interior de una impresora 3D. Matthias Rubio, estudiante de ingeniería mecánica, explica: «Estábamos delante de la impresora 3D y nos vino la idea de usar su estructura interior para construir una plataforma voladora que combina vuelo y manipulación». Este es un planteamiento nuevo, ya que este tipo de brazos delta aún son infrecuentes en los manipuladores voladores.
El brazo paralelo compensa los errores de posicionamiento
Los grupos de rotores pueden girar sobre su propio eje. Esto permite que el objeto volador de 7,5 kg se desplace en cualquier dirección. Durante el proyecto prioritario, el dron omnidireccional se puso en funcionamiento dentro de una sala equipada con un sistema visual de seguimiento del movimiento que garantiza la medición de la posición y la alineación. Esto hace que el Prismav sea capaz de interactuar con su entorno y posicionar la pinza con precisión. Dos baterías con una capacidad de 20 000 mAh permiten un tiempo de vuelo de 12 minutos.

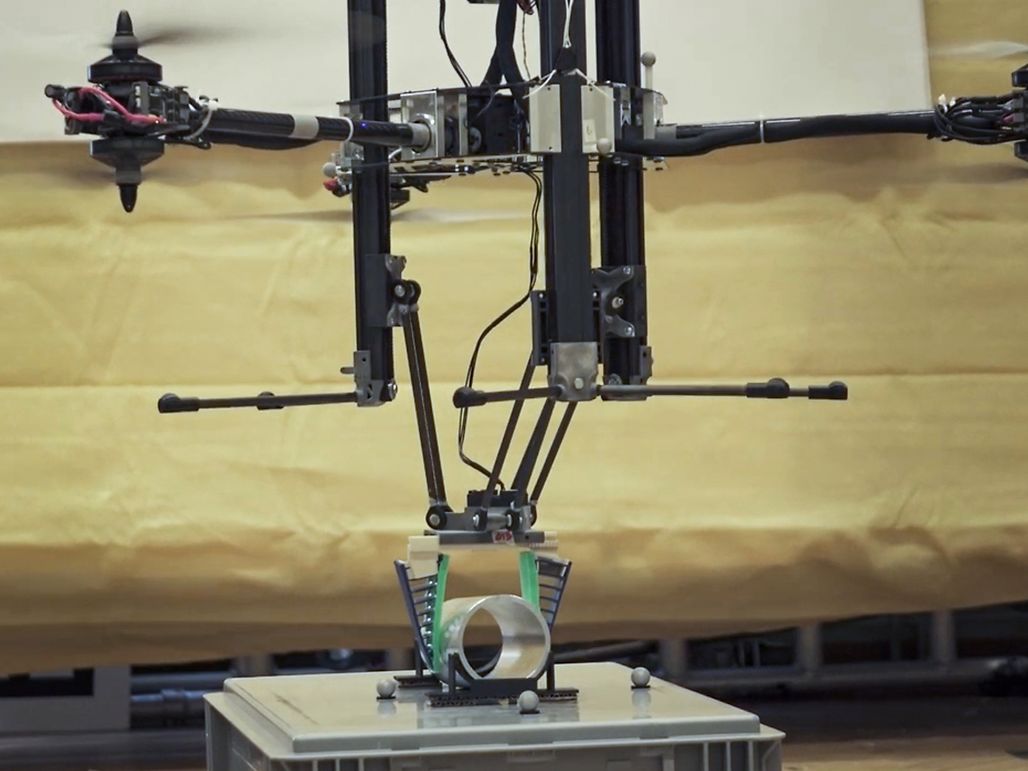
Los ocho estudiantes (siete de ingeniería mecánica y uno de ingeniería eléctrica) del equipo Griffin celebran el éxito de un vuelo en el que se transportó un cilindro de 500 g.
La imprecisión restante en las maniobras de vuelo se encuentra normalmente en el rango entre 10 y 15 centímetros. Para compensar esto, tres motores brushless de maxon posicionan el brazo con pinza de forma precisa. Las tres correderas, que se mueven en guías lineales, se posicionan individualmente mediante una correa dentada. Con este sistema, la pinza puede alcanzar cualquier posición dentro del espacio 3D marcado. Para ahorrar peso, sin renunciar a la fuerza, el equipo eligió los compactos motores ECX TORQUE 22 M.
Para áreas peligrosas o inaccesibles
Con Prismav, los estudiantes han sentado las bases para futuras investigaciones. Matthias Rubio añade: «Hemos demostrado que un manipulador volador puede agarrar, transportar y depositar un cilindro de 500 g interactuando con su entorno». La clave de ello es que el brazo con pinza compensa los errores de posicionamiento con mayor rapidez que los movimientos del dron.
El proyecto prioritario, que fue presentado en el 2021, obtuvo una respuesta muy positiva. Por ello, los estudiantes continúan ahora desarrollando el Prismav como parte de sus proyectos de grado. Están optimizando el posicionamiento automatizado, el cálculo de la trayectoria de vuelo y el software de control, además de estar integrando un controlador intuitivo. Se trata de algo lógico, ya que el rango potencial de aplicaciones es enorme. En el futuro, los robots voladores podrían, por ejemplo, realizar trabajos en lugares inaccesibles o peligrosos: apretar tornillos, montar andamios, reparar líneas de alta tensión o incluso construir estructuras de protección contra aludes.