maxon Story
La densité de puissance en robotique

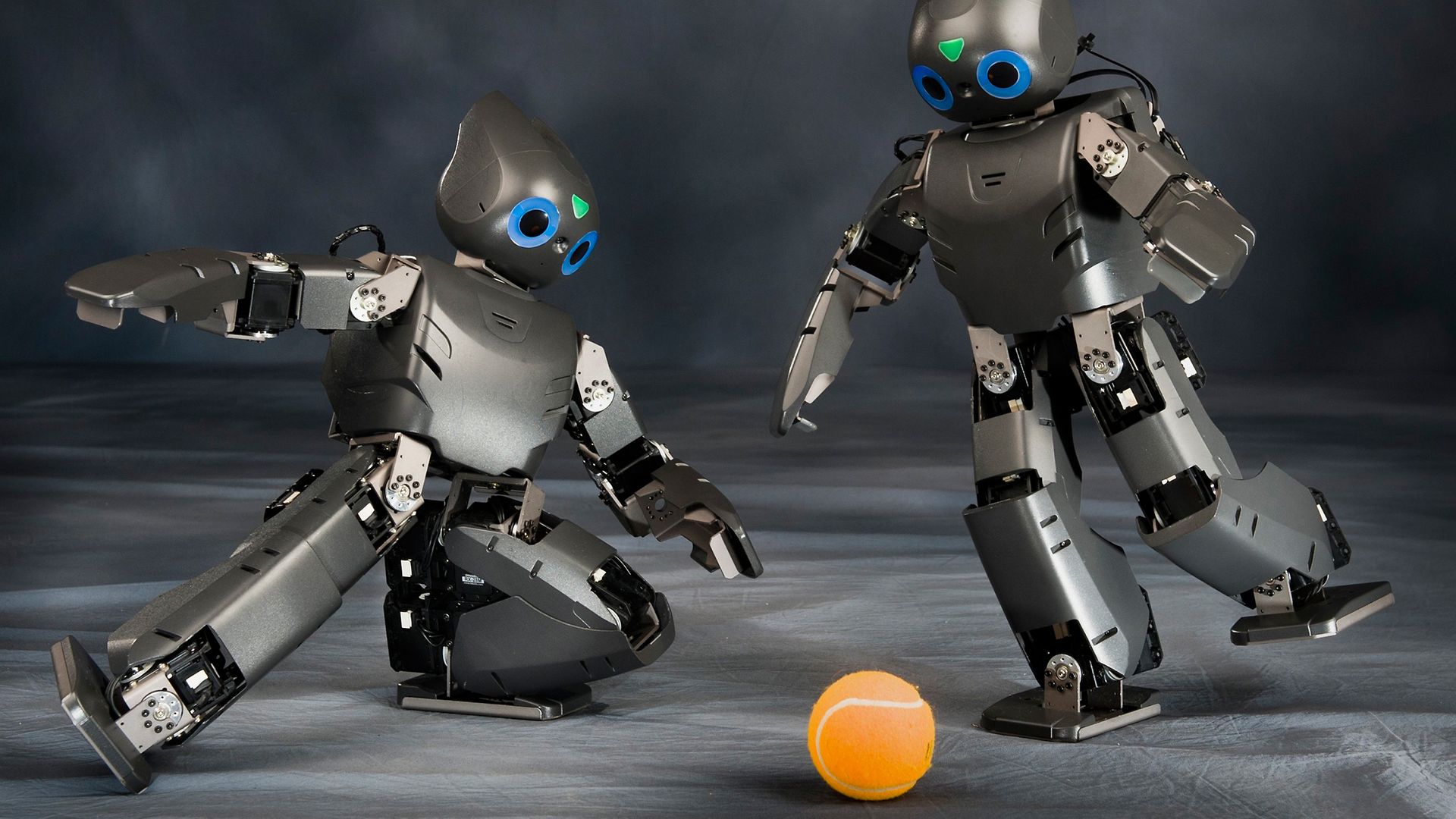
C'est une affaire de couple – Les robots d'inspection pour tuyaux et conduits, les robots de sauvetage dans les zones dévastées ou les robots humanoïdes, ils ont tous un point en commun: ce sont des robots mobiles qui aident l'humain. Nous présentons ici certaines des exigences de ces robots en matière de technique d'entraînement dans le détail.
Une densité de puissance élevée est l'une des caractéristiques principales que doit présenter l'entraînement des robots mobiles. Pour les robots, il s'agit de fournir un couple élevé pour un encombrement le plus réduit possible. En ce qui concerne la vitesse, une valeur inférieure à 1000 tr/min est normalement suffisante en robotique, même pour les mouvements rapides.
Moteurs DC: densité de puissance élevée
Lorsqu'une grande densité de puissance est requise, les moteurs DC constituent souvent le premier choix. Ils sont idéaux dans les applications à accélération grâce à leur couple de démarrage élevé. Les moteurs maxon «sans fer» avec ou sans balais sont des exemples typiques de ces moteurs DC. Ils sont hautement efficaces. Ces moteurs à grande vitesse sont souvent de forme longue et étroite et présentent un couple relativement faible. Pour obtenir les couples élevés requis en robotique, les moteurs sont combinés à des réducteurs.
Si un mouvement linéaire d'une force importante est requis, il est possible de l'obtenir par une conception mécanique appropriée avec un rapport de réduction élevé sans sacrifier les avantages des moteurs à grande vitesse. Exemple: des broches à pas réduit et entraînement de câbles à petite roue de renvoi.
Moteurs multipôles: couple plus élevé
Augmenter le nombre de pôles magnétiques permet d'augmenter le couple. Les moteurs maxon EC-4pole sont un premier pas vers les moteurs multipôles. Dans ce cas, des pôles magnétiques supplémentaires signifient aussi un design et un assemblage plus complexes. Les moteurs DC conventionnels, sans balais à noyau de fer fendu, sont souvent conçus avec de multiples pôles et ont donc tendance à fournir des vitesses inférieures à un couple supérieur.

Entraînements robotiques: des petits entraînements puissants sont nécessaires Les moteurs utilisés dans les applications robotiques doivent présenter les trois caractéristiques suivantes: niveau élevé de rendement, de dynamique et de densité de puissance.
Moteurs EC flat: puissance et prix attractif
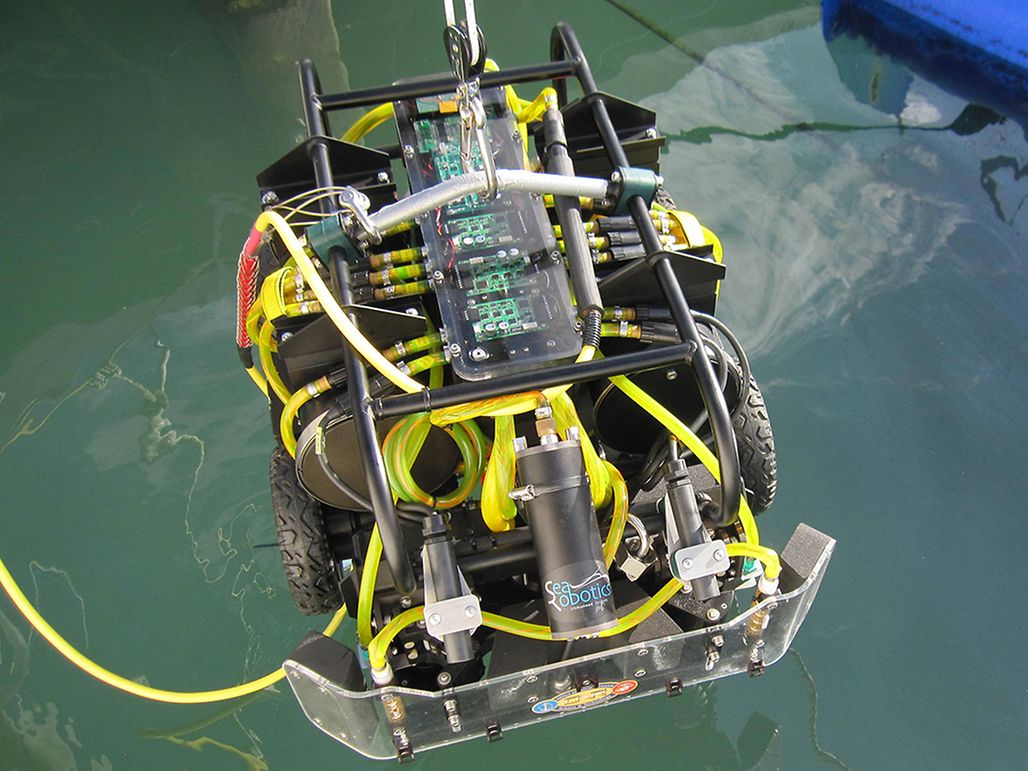
Les moteurs plats multi-pôles de maxon sont proches de la solution idéale requise en robotique. Les moteurs à rotor extérieur génèrent la force à la distance maximum possible de l'axe de rotation, créant ainsi une densité de puissance relativement élevée à une vitesse modérée. Mais l'inertie du robot est élevée elle aussi, ce qui restreint la dynamique du système. Le robot de nettoyage immergé Hullbug est un exemple d'application avec des moteurs plats. Le bobinage conventionnel à noyau de fer multi-dent et l'utilisation d'un anneau magnétique permanent iso-tropique, qui est magnétisé en une seule étape, rendent les moteurs plats EC économiques à fabriquer. L'assemblage complexe de l'anneau magnétique à partir de pièces individuelles est supprimé.
Vues avant et arrière du EC90 flat Exemple d'application avec des moteurs plats : le robot de nettoyage immergé Hullbug.


Brochure
Robotique

Des solutions d'entraînement de 0.0002 à 120 Nm. L'environnement industriel devient plus rapide, plus précis et plus sûr. Cela impose des exigences élevées aux machines.
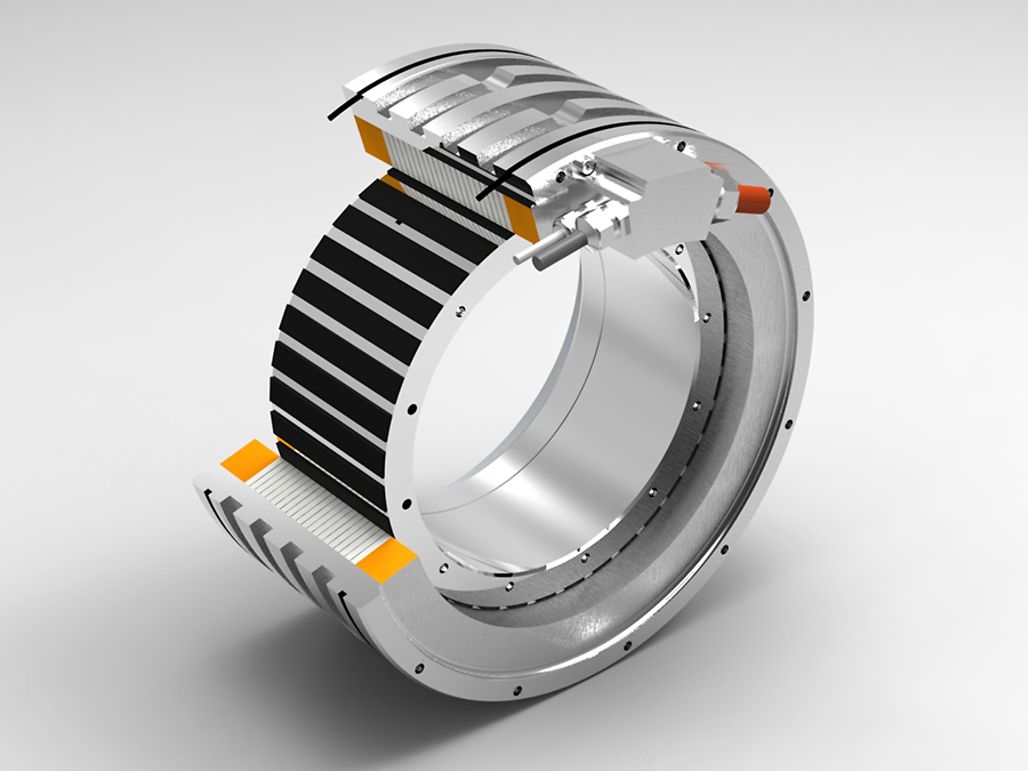
Moteurs à couple: nombre importants de pôles, prix élevé
Les moteurs-couple sont un exemple de moteurs qui présentent un très grand nombre de pôles: moteurs électriques à vitesse réduite, couple élevé et arbre creux. Souvent, ils se composent uniquement d'un rotor et d'un stator et sont conçus directement pour l'application. Cela élimine le besoin d'engrenages, de courroies, d'accouplements ou de roulements. Ces entraînements directs sont sans jeu et sont normalement utilisés dans des applications dynamiques avec un contrôle précis. Les entraînements linéaires constituent un cas particulier. En raison de leurs nombreux pôles, les moteurs-couple nécessitent des fréquences de commutation élevées. La chaleur générée doit également être dissipée par un refroidissement par eau.
Alors que les moteurs couple sont parfaitement adaptés au couple et à la dynamique des applications robotiques, le manque de normalisation et les importantes retombées sur la conception rendent leur utilisation coûteuse. Les combinaisons modulaires et flexibles de moteur-réducteur constituent la solution de prédilection pour les robots. Le type de moteur et la construction sont sélectionnés en fonction des exigences spécifiques en matière de puissance, d'encombrement et enfin et surtout, de coûts.
Des questions? Contactez nos spécialistes.